

Опорные точки
Два звена образуют одну кинематическую пару.
Кинематические пары различают по числу условий связи, накладываемых на относительное движение звеньев ( пары V, IV, …,I классов); по числу степеней свободы в относительном движении звеньев ( одноподвижные, двухподвижные, … , пятиподвижные); по виду относительного движения звеньев (вращательная, винтовая, сферическая, 0и т.д.); по виду замыкания пары (с кинематическим и силовым замыканием) и т.д.
Кинематические пары передают силы и пары сил в определенных направлениях.
Контрольные вопросы
Чем кинематическая пара отличается от других подвижных соединений двух звеньев?
Какими преимуществами и недостатками обладают низшие пары по сравнению с высшими?
Что такое число степеней свободы механической системы?
В учебной литературе [6, c.50] используется термин «начальная пара . Что он означает?
1.4. Кинематические цепи
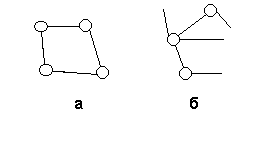
Кинематической цепью называется система звеньев, связанных между собой кинематическими парами. Если звенья кинематической цепи образуют один или несколько замкнутых контуров* (рис.1.4, а), то такая цепь называется замкнутой кинематической цепью. В незамкнутой кинематической цепи звенья не образуют замкнутых контуров (рис.1.4, б).
Рис.1.4.
Схема
кинематических цепей: а – замкнутой;
б
– незамкнутой

М ожно
ли расчленить кинематическую цепь на
две части так, чтобы обе части были
кинематическими цепями?
ожно
ли расчленить кинематическую цепь на
две части так, чтобы обе части были
кинематическими цепями?

* Замкнутый контур – совокупность последовательно соединенных звеньев, в которой любое из звеньев соединено с двумя другими звеньями.
** В пособии рассматриваются механизмы, в составе которых можно выделить кинематические цепи.
Опорные точки
Мы говорим: "механизм" – подразумеваем кинематическую цепь, говорим: "кинематическая цепь механизма" – подразумеваем механизм.
В замкнутой кинематической цепи звенья образуют один или несколько замкнутых контуров.
Кинематическая цепь используется для описания любых механических систем, составленных из твердых тел, в том числе и механизмов.
Контрольные вопросы
Как из кинематической цепи (рис. 1.5, а) получить механизм?
Чему равно минимальное число звеньев и кинематических пар в кинематической цепи?
Чем кинематическая цепь отличается от механизма, состоящего из твёрдых тел?
Парадоксальное несоответствие, которое отмечается в России середины XIX века - очень невысокий уровень техники и мощная наука, в особенности ее теоретические направления, возложило на русских теоретиков, в первую очередь на математиков, очень серьезную и ответственную обязанность: именно математикам (!!!) пришлось развивать теорию технических наук, так как техники сами еще не были достаточно подготовлены для выполнения этой задачи.
Глава и основатель Петербургской математической школы П.Л. Чебышев впервые применил математические методы к задачам механики машин. Он опубликовал 15 работ по структуре и синтезу рычажных механизмов, изобрел и построил (!!!) свыше 40 различных механизмов 6. В Петербурге исследования в области механики машин были продолжены П.О. Сомовым, Н.Б. Делоне. В Одессе в Новороссийском университете школу кинематики механизмов создал В.Н. Лигин и его ученики: Х.И. Гохман, Д.Н. Зейлигер, И.М. Занчевский. В Киевском университете вопросы прикладной механики развивал Н.А. Дьяченко, И.И. Рахманинов. Все это были математики, и вопросы механики машин они рассматривали чисто теоретически.
Особняком стоял Московский университет. Здесь, после организации Московского технического училища, стало традицией, что кафедры прикладной механики в этих высших школах занимали одни и те же профессора: Ф.Е. Орлов, Н.Е. Жуковский. Создавая на рубеже веков свою школу в области механики машин, Жуковский полагал, что исследователи в этом направлении должны иметь глубокое математическое и, кроме этого, инженерное образование. Поэтому его ученики – Н.И. Мерцалов, В.П. Горячкин, А.И. Сидоров, Д.С. Зернов, Д.П. Рузский, Л.В. Ассур после окончания математического отделения университета шли на механическое отделение Московского технического училища или Петербургского технологического института, где завершали свое образование 12.


К какому миру (вещей или идей) относятся
звено, кинематическая пара, кинематическая
цепь?
какому миру (вещей или идей) относятся
звено, кинематическая пара, кинематическая
цепь?