

Задания для самостоятельной работы
Какое чудо – этот переход
От слепоты к прозрению,
К пониманию сути дела.
М.Вертгеймер

В копилку
Советы решающим задачи (продолжение) методов
Все время помните об условии задачи, перечитывайте его неоднократно.
Если не знаете как решать:
а) наметьте несколько направлений, по которым может пойти решение;
б) предположите, что задача уже решена, и определите возможные пути к ответу;
в) исследуйте пути решения, делая по шагу то от начала, то от конца, пока пути не пересекутся.
12.Умейте задать себе вопрос, который высветит недочеты в решении.
13.Проведите мысленный эксперимент: измените что-либо в схеме, в условии задачи.
14.Не используйте без проверки предложенных вам готовых решений.
«Каждый должен сам овладеть навыками по усвоению знаний и делать это в присущем ему стиле» (С.Пейперт)
2.1. При каких условиях кинематическая пара с постоянным контактом звеньев в трех точках будет: а) поступательной; б) плоскостной; в) сферической; г) высшей (4Л); д) высшей (5Т) и почему?
2.2. В литературе по теории механизмов [1], [5] утверждают, что в плоских и сферических механизмах на движения всех звеньев наложены 3 общие связи, а в цилиндрических – 4. Что понимается под термином общие связи?
2.3. В учебнике [6, c.39] утверждается, что при отклонении реальных поверхностей и профилей элементов кинематических пар от идеальных в парах появляются избыточные локальные связи и пары становятся статически неопределимыми. Можно ли согласиться с таким утверждением и почему?
2.4. Докажите истинность или ложность следующего умозаключения, сделанного по аналогии. Из курса «Сопротивление материалов» известно, что замкнутый плоский контур стержневой конструкции имеет три дополнительные внутренние связи – трижды статически неопределим. Каждый замкнутый контур кинематической цепи плоского механизма с вращательными и поступательными парами имеет три нормальные избыточные связи и также трижды статически неопределим. Отсюда следует, что речь идет об одних и тех же связях, по-разному названных в теории механизмов и в сопротивлении материалов, поэтому нормальные избыточные связи есть дополнительные внутренние связи.
2.5. Где следует расположить опору С (рис.2.13, а), чтобы трехзвенная ферма стала кинематически изменяемой системой? Что является причиной появления мгновенной подвижности в ферме?
2.6. Чему равно число степеней свободы и число местных подвижностей в кулачковом механизме (рис.2.13, б)?
2.7. Где следует расположить шарнир А, чтобы статически определимая стержневая система (рис.2.13, в) превратилась из фермы в статически неопределимый механизм, если CF = DE = AB, CF ||DE?
2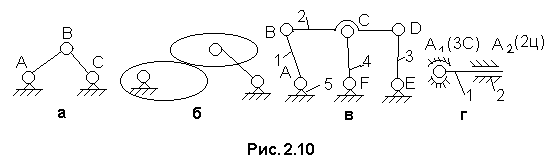 .8.
Определите число избыточных связей в
разветвленной кинематической паре А
(рис.2.13, г). Что это за связи?
.8.
Определите число избыточных связей в
разветвленной кинематической паре А
(рис.2.13, г). Что это за связи?
2
Рис.
2.13. Схемы
кинематических цепей: а – кинематически
неизменяемая система; б
– механизм; в – кинематически
неизменяемая система; г – вал на двух
опорах
2.10. В учебнике [1, c.41] утверждается, что низшие пары в плоских механизмах могут быть либо вращательными, либо поступательными. Почему нельзя согласиться с данным утверждением? Какие изменения необходимо внести в текст, чтобы утверждение стало истинным?
2.11. В учебниках [4, c.14], [6, c.39], [16, c.43] подчеркивается, что класс кинематической пары определяется по числу геометрических связей, наложенных на относительное движение звеньев, а в сборнике рекомендуемых терминов [29] слово «геометрических» пропущено. Проведите критический анализ обоих определений и дайте свое.
2.12. Сколько сферических пар может быть в плоском четырехзвенном механизме с низшими кинематическими парами и замкнутой кинематической цепью?
2.13. Объясните, почему при замене одной или двух вращательных пар на поступательные кинематическая цепь (рис.2.13, а) остается фермой, а при замене всех трех вращательных пар на поступательные превращается в механизм?
2.14. Обоснуйте, может ли кинематическая цепь стойки из двух подвижных звеньев и трех поступательных пар иметь две степени свободы? Дайте примеры.
2.15. Механизм шарнирного параллелограмма (рис.2.8) имеет мгновенную подвижность, которая может привести к его заклиниванию. Для устранения этой подвижности в кинематическую цепь вводят кинематически пассивное звено. Изобразите структурную схему шарнирного параллелограмма в котором мгновенная подвижность отсутствует.
2.16. Устранена ли эта подвижность в механизме (рис.2.4) двойного параллелограмма?
2.17. Какую кинематическую пару образуют куб и вписанный в него шар? Дайте характеристики связям, наложенным на относительное движение звеньев.
2.18. Какая (плоская или пространственная) структурная схема приведена для изображения механизма:
а) рис.2.6, а; б) рис.2.6, б; в) рис.2.7 ?
2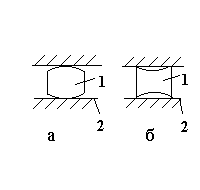 .19.
Какие плоские кинематические пары
образуют звенья 1 и 2 (рис 2.14)?.
.19.
Какие плоские кинематические пары
образуют звенья 1 и 2 (рис 2.14)?.
2.20. Обоснуйте, отличаются ли требования к точности изготовления и монтажа кинематической пары при ее силовом или кинематическом замыкании?
2
Рис.
2.14. Схема
плоских кинематических пар
2.22. В сопротивлении материалов, теоретической механике и теории механизмов используются структурные формулы, связывающие число стержней, контуров, шарниров с числом подвижностей стержневой системы. Почему с помощью структурных формул в общем случае нельзя установить, является ли стержневая система кинематически изменяемой или нет?
2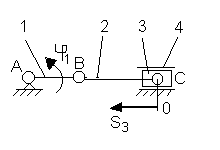 .23.
В кривошипно-ползунном механизме
двигателя внутреннего сгорания ползун
является входным звеном, а кривошип –
выходным.Почему при кинематическом
анализе механизма в качестве начального
звена выбирается кривошип (рис.2.15), угол
поворота φ1 которого
принимается за обобщенную координату,
а не ползун?
.23.
В кривошипно-ползунном механизме
двигателя внутреннего сгорания ползун
является входным звеном, а кривошип –
выходным.Почему при кинематическом
анализе механизма в качестве начального
звена выбирается кривошип (рис.2.15), угол
поворота φ1 которого
принимается за обобщенную координату,
а не ползун?
2
Рис.
2.15. Схема
кривошипно- ползунного
механизма
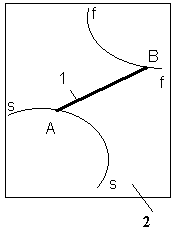 .24.
В учебнике [1, с. 42] приведена плоская
«траекторная пара» – соединение звеньев
1 и 2, в котором звено 1 своими концами А
и В скользит в прорезях f
– f
и s
– s
звена 2 (рис.2.15). Элементами пары,
принадлежащими звену 1, являются точки
А и В, а элементами, принадлежащими звену
2, – плоские кривые f
– f
и s
– s.
Выполните классификацию «траекторной
пары».
.24.
В учебнике [1, с. 42] приведена плоская
«траекторная пара» – соединение звеньев
1 и 2, в котором звено 1 своими концами А
и В скользит в прорезях f
– f
и s
– s
звена 2 (рис.2.15). Элементами пары,
принадлежащими звену 1, являются точки
А и В, а элементами, принадлежащими звену
2, – плоские кривые f
– f
и s
– s.
Выполните классификацию «траекторной
пары».
2.25. сформулируйте условия существования плоского механизма.
![]()
Рассчитайте коэффициент качества обучения по формуле:
К2 = m/25 * 100% = ,
где m – число правильно решенных задач
(Задача, содержащая несколько вопросов, считается решенной, если правильные ответы получены на все вопросы).
«Человек по-настоящему мыслящий, черпает из своих ошибок не меньше познания, чем из успехов» (Д. Дьюи)
Связи
– ограничения,
налагаемые на
положения
и скорости точек механической
системы,
которые должны выполняться при любых
действующих на систему силах
Виды геометрическая, дифференциальная (кинематическая)

в

