

4 .4. Механизм как совокупность элементарных механизмов
В
Рис.
4.8. Схема
образования составного механизма путем
последовательного соединения элементарных
механизмов: а,
б – элементарные механизмы; в
– составной механизм
К улисный (рис. 4.8, а) и коромыслово-ползунный (рис. 4.8, б) механизмы являются элементарными, так как каждый из них нельзя расчленить на два самостоятельных механизма. Если выходное звено (кулису 3) первого механизма жестко соединить с входным звеном (коромыслом 3) второго механизма, то получится составной кулисный механизм поперечно-строгального станка (рис. 4.8, в), предназначенный для перемещения рабочего органа – суппорта (ползуна 5). Любой многоступенчатый редуктор можно разделить на отдельные ступени, не нарушая свойств (передаточного отношения) каждой ступени, следовательно, каждая ступень является элементарным механизмом, а многоступенчатый редуктор – составным.


Что происходит со звеньями и кинематическими парами при жестком соединении механизмов?
Число степеней свободы W составного механизма, образованного жестким соединением элементарных механизмов, можно подсчитать по формуле
m
W = Σ Wi – J , (8)
i=1
где Wi – число степеней свободы i-го элементарного механизма; m – число элементарных механизмов; J–число жестких соединений элементарных механизмов.
Например, для механизма поперечно-строгального станка (рис.4.8, в) m = 2, W1 = W2 = 1, J = 1, W = 1+1–1 = 1
Последовательным
соединением
механизмов
называют
совокупность механизмов, в которой
выходное звено первого механизма
соединено с входным звеном второго
(рис. 4.8). Параллельным
соединением механизмов
н
Рис.
4.9. Схемы
составного (а) и элементарных (б, в)
механизмов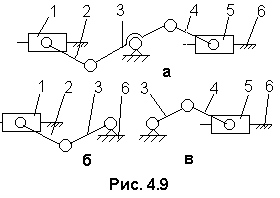 азывают
совокупность механизмов, в которой все
входные или все выходные звенья механизмов
взаимосвязаны. В
жестком парал- лельном соединении
сливаются в
одно входные или выходные звенья
э
азывают
совокупность механизмов, в которой все
входные или все выходные звенья механизмов
взаимосвязаны. В
жестком парал- лельном соединении
сливаются в
одно входные или выходные звенья
э


В чем принципиальное различие с точки зрения структуры между структурной моделью третьего уровня и остальными моделями?
П
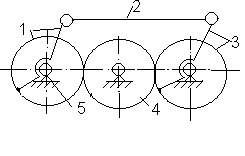
Рис.
4.10. Схема
зубчато-рычажного механизма
О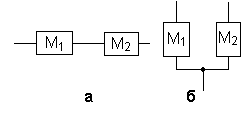 бобщенная
структурная схема составного механизма
(рис.4.11) отражает количество, вид и способ
соединения элементарных механизмов и
является графической формой структурной
модели.
бобщенная
структурная схема составного механизма
(рис.4.11) отражает количество, вид и способ
соединения элементарных механизмов и
является графической формой структурной
модели.
В
Рис.
4.11. Обобщенные
структурные схемы механизмов

Читатель - Существуют ли другие структурные модели механизма?
Автор - Да, и одну из них мы уже неоднократно применяли.
Читатель - ???
А
 втор
- Механизм
можно представить состоящим из двух
подсистем: системы звеньев и системы
связей, установленных между звеньями.
Такие модели в последние годы используются
для математического моделирования
динамических процессов в механизмах.
втор
- Механизм
можно представить состоящим из двух
подсистем: системы звеньев и системы
связей, установленных между звеньями.
Такие модели в последние годы используются
для математического моделирования
динамических процессов в механизмах.