

Опорные точки
Структурная модель механизма – условный образ механизма, достоверно отображающий его структурные свойства.
Механизм можно описать системой структурных моделей, отличающихся глубиной структурных уровней (от крупных составных частей до элементарных), каждая из которых отражает определенное представление о строении механизма и позволяет получить новое знание о механизме.
Контрольные вопросы
В какой форме может быть представлена структурная модель механизма?
Является ли структурной моделью механизма его структурная схема?
Чем обобщенная структурная схема механизма отличается от структурной схемы и что у них общего?
Чем отличаются структурные модели разных уровней?
4.2. Механизм как кинематическая цепь, состоящая из звеньев и кинематических пар
В соответствии с первым подходом механизм представляется состоящим из звеньев и кинематических пар. Графическим описанием такой модели является структурная схема механизма. Определив число n подвижных звеньев механизма и количество p и вид кинематических пар можно рассчитать число k замкнутых контуров в кинематической цепи (формула Гохмана):
k = p – n , (1)
а также установить общие закономерности в строении механизма, носящие название структурных формул.
П усть механизм состоит из n подвижных звеньев. Если бы все звенья были свободными телами, то суммарное число степеней свободы совокупности таких тел относительно стойки было бы 6n. Каждая одноподвижная пара накладывает на относительное движение звеньев, образующих пару, 5 связей, каждая двухподвижная пара – 4 связи и т. д. Если учесть наличие в механизме избыточных связей, дублирующих другие, ранее наложенные связи, то число степеней свободы механизма относительно стойки W определяется по формуле Малышева:
W = 6n – (5p1+4p2+3p3+2p4+p5 – q), (2)
где pi – число кинематических пар, подвижность которых равна i; q – число контурных избыточных связей.
Для плоских и квазиплоских механизмов кроме пространственной структурной схемы с указанием действительных кинематических пар может быть использована и плоская структурная схема (см.п. 2.4), в которой указываются изображения кинематических пар. Число степеней свободы в плоской схеме механизма WП находится по формуле Чебышева-Малышева:
WП – qτ =3n – 2p1П – p2П , (3)
где р1П, р2П – соответственно число одноподвижных и двухподвижных плоских пар; qτ–число избыточных связей (тангенциальных) в плоской схеме механизма.
Число степеней свободы механизма W включает число основных степеней свободы Wо (основных подвижностей), обеспечивающих преобразование движений, и число лишних степеней свободы – местных Wм и групповых Wг подвижностей. Поэтому в общем случае W=WО+WМ+WГ. Число подвижностей в плоской схеме механизма WП подсчитывается по аналогичной формуле WП=WОП+WМП+WГП. В плоском механизме W=WП, поэтому для таких механизмов индекс «п» в равенстве (3) часто опускается, но подразумевается. Для квазиплоского механизма W>WП, но WО=WОП.
В общем случае в структурные формулы (2),(3) входят по две неизвестные величины W и q. Поэтому для расчета по структурным формулам необходимо предварительно найти одну из них. Например, в незамкнутых кинематических цепях избыточные связи отсутствуют q=0. В таких механизмах k=0, а число подвижных звеньев равно числу кинематических пар. Из формулы (1) следует: n = p1+p2+p3+p4+p5, и равенство (2) принимает вид
W = p1+2p2+3p3+4p4+5p5 . (4)
О
Рис.
4.1. Схема
плоского манипулятора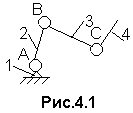
Существуют и другие варианты структурных формул, однако все они могут быть выведены из формулы (2), справедливой для любого механизма, поэтому формулу Малышева называют универсальной структурной формулой.

Предложите структурную формулу для произвольной части кинематической цепи механизма.