Опорные точки
Избыточными (повторяющимися, дублирующими) связями называют связи, которые повторяют ограничения, наложенные другими связями.
Избыточные связи имеют следующие свойства:
а) устранение избыточных связей не влияет на кинематику механизма;
б) каждая избыточная связь увеличивает статическую неопределимость механизма на единицу.
Различают три типа избыточных связей:
а) на элементах кинематических пар;
б) в ветвях кинематических пар;
в) в замкнутых контурах кинематических цепей.
В любой кинематической паре соприкосновение по поверхностям и линиям можно заменить соприкосновением в точках, число которых равно классу пары.
В незамкнутых кинематических цепях контурные избыточные связи отсутствуют.
Статически неопределимые механизмы (с контурными избыточными связями) существуют только при строгом выполнении определенных соотношений между геометрическими параметрами звеньев и кинематических пар.
При проектировании механизмов следует использовать статически определимые структурные схемы.
Контрольные вопросы
Какие избыточные связи полезны для работы механизма?
Какими свойствами обладают статически определимые механизмы?
Сформулируйте недостатки и достоинства конструкций механизмов с контурными избыточными связями.
П ониманию
способствует:
ониманию
способствует:
1. Умение задавать себе вопросы.
2. Использование аналогии.
3 .
Рациональное сочетание языков
(естественный,
.
Рациональное сочетание языков
(естественный,
графический, математический.)
Препятствует: 1.
Привычка зазубривать. 2.
Перегруз информации. 3.
Инерция мышления.
2.3. Степени свободы механизма
О бобщенными координатами механизма называют независимые между собой координаты, определяющие положения всех звеньев механизма относительно стойки. Так, в механизме двойного параллелограмма (рис.2.4) за обобщенную координату можно принять угол поворота кривошипа АС, так как положение звена АС, заданное этим углом, определяет также положения всех других подвижных звеньев механизма. Большинство механизмов имеют одну обобщенную координату, но возможны случаи, когда число обобщенных координат механизма достаточно велико, например в механизмах манипуляторов промышленных роботов число обобщенных координат может быть больше шести. Число степеней свободы механизма (число независимых между собой возможных перемещений механизма относительно стойки) в механизмах с голономными связями совпадает с числом обобщенных координат.

Знаете ли вы, что рука человека имеет свыше 20 степеней свободы.
В
механизмах встречаются степени свободы
звеньев и групп звеньев, не влияющие на
характер движения механизма в целом,
которые называются лишними
степенями свободы,
или соответственно местными
и групповыми
подвижностями.
Местные подвижности бывают полезными
или вредными для работы механизма. Их
часто специально вводят в механизм для
уменьшения износа элементов пары,
улучшения условий смазки, самоустановки
звеньев под нагрузкой, повышения
надежности и КПД. Например, применение
ролика 2 (рис.2.6, а) позволяет з
Рис.
2.6. Схемы
механизмов с местными подвижностями
Рис.
2.7. Схема
механизма с групповой подвижностью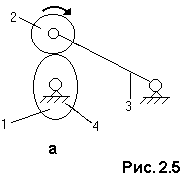 аменить
трение скольжения между к
аменить
трение скольжения между к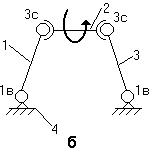 улачком
1 и коромыслом 3 на трение качения,
уменьшая при этом износ. В тоже время
лишние степени свободы могут приводить
к возник-новению дополнительных в
улачком
1 и коромыслом 3 на трение качения,
уменьшая при этом износ. В тоже время
лишние степени свободы могут приводить
к возник-новению дополнительных в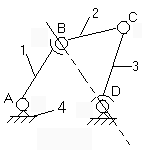 пециальном
исследовании. Если местная подвижность
часто оказывается полезной, то групповая
подвижность в большинстве случаев
недопустима, например, в четырехзвеннике
(рис.2.7) шатун 2 и коромысло 3
имеют возможность поворота вокруг оси,
проходящей через шарниры В и D,
что может п
пециальном
исследовании. Если местная подвижность
часто оказывается полезной, то групповая
подвижность в большинстве случаев
недопустима, например, в четырехзвеннике
(рис.2.7) шатун 2 и коромысло 3
имеют возможность поворота вокруг оси,
проходящей через шарниры В и D,
что может п
В
Рис.
2.8. Схема
механизма с мгновенной подвижностью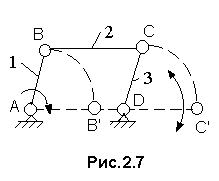
П
Рис.
2.9.Схема
образования мгно-венной подвижности
в механизме с одной степенью свободы:
1- связь; 2 – степень свободы; 3 – мгновенная
степень свободы; 4 – мгновенная избыточная
связь