

Опорные точки
Структурным синтезом механизма называется проектирование структурной схемы механизма.
При синтезе структуры механизма учитывают структурные, кинематические, динамические и другие условия.
Структурный синтез плоских механизмов обычно проводят в два этапа. На первом проектируется плоская структурная схема, на которой указываются изображения звеньев и кинематических пар. На втором этапе (синтез самоустанавливающихся механизмов) переходят от плоской к пространственной структурной схеме, учитывая, что звенья движутся в разных плоскостях, а реальные кинематические пары могут быть трех-, четырех- и пятиподвижными.
Метод структурного синтеза заключается в чередовании логических приемов анализа и синтеза с использованием подходящей структурной модели механизма. Вид структурной модели выбирается в результате сравнения условий поставленной задачи с возможностями той или иной структурной модели.
Контрольные вопросы
Чем параметрический синтез механизма отличается от структурного?
С чего начинается проектирование любого механизма?
Как выбирается подходящая структурная модель при структурном синтезе?
Каким образом при выборе структурной схемы механизма учитываются ее функциональные возможности?
6.2. Проектирование структурных схем механизмов
1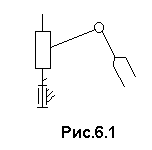 .
Построить
структурную схему пространственного
механизма манипулятора с числом степеней
свободы W = 3 при минимальном числе звеньев
и с использованием только одноподвижных
кинематических пар.
.
Построить
структурную схему пространственного
механизма манипулятора с числом степеней
свободы W = 3 при минимальном числе звеньев
и с использованием только одноподвижных
кинематических пар.
Рис.
6.1. Схема
манипулятора
2. Построить все возможные плоские структурные схемы плоского четырехзвенного механизма с низшими одноподвижными кинематическими парами и замкнутой кинематической цепью, у которого W = 1, qτ= 0, а одна кинематическая пара – поступательная.
Как и в предыдущем примере механизм рассматривается как совокупность звеньев и кинематических пар. Так как в четырехзвенном механизме одно звено принимается за неподвижное, то число подвижных звеньев n = 3. Из (3), учитывая, что W = 1, qτ= 0; р2П = 0, имеем р1П = 4. Число замкнутых контуров найдем из формулы (1) k = р – n = 4 – 3 =1. Следовательно, кинематическая цепь из четырех звеньев (рис.6.2, а) имеет одно неподвижное звено, один замкнутый контур, три вращательные и одну поступательную кинематические пары. Если применить метод инверсии и рассмотреть варианты структурных схем, в которых за неподвижное принимаются поочередно все звенья в кинематической цепи четырехзвенника, то получим четыре варианта структурных схем (рис.6.2).
Д ля структурного синтеза механизмов с числом звеньев более четырех используемая структурная модель неэффективна. В этом случае удобным является представление механизма в виде совокупности ведущей и ведомой цепей и использование принципа наслоения структурных групп.
3
Рис. 6.2. Схемы плоских четырехзвенных
механизмов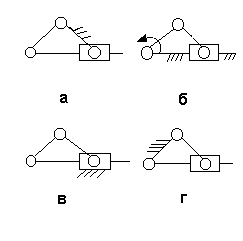
Так как по условию задачи W = 1, то в проектируемом механизме будет одно начальное звено. В пятизвенном механизме два звена (начальное и стойка) образуют ведущую цепь, а остальные три – две структурные группы. Принимаем, что первая структурная группа состоит из одного звена, а вторая из двух. Тогда, учитывая, что для структурной группы W = 0, qτ = 0, получим из уравнения (3) для группы из одного звена р1П=1, р2П = 1, а для группы из двух звеньев р1П= 3, р2П= 0. Так как выходное звено совершает возвратно-поступательное движение, то в качестве двухзвенной группы Ассура используем диаду II класса 2 вида. Два варианта решения поставленной задачи приведены на рис.6.3.
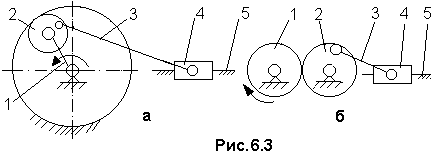
Рис.
6.3. Схемы
пятизвенных плоских механизмов
4 . Подобрать плоскую структурную схему механизма для передачи вращения между параллельными валами без изменения угловой скорости.
Известно, что поставленную задачу можно решить с использованием следующих механизмов: зубчатого (рис. 6.4, а); с гибкой связью (рис. 6.4, б); шарнирного параллелограмма (рис. 6.4, в); муфты Ольдгейма (рис. 6.4, г). Для выбора единственного решения необходимо учитывать дополнительные условия: структурные, кинематические, динамические, технологические, экономические и т.п., например расстояние между параллельными валами, диапазоны передаваемой мощности и частоты вращения, стоимость
изготовления, КПД и т. д.
5
Рис.
6.4. Схемы
плоских механизмов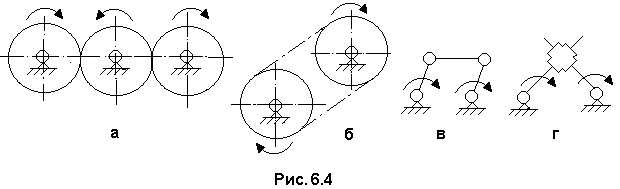
Р
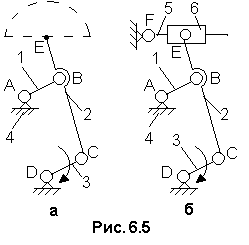
Рис.
6.5. Схемы
плоских механизмов: А
– прямолинейно-направляющего;
б – с длительной
остановкой выходного звена