

1.3. Кинематические пары
З венья механизма образуют между собой подвижные соединения. Кинематической парой (парой) называется соединение двух соприкасающихся звеньев, допускающее их относительное движение. Условимся, что два звена могут образовывать только одну кинематическую пару. Если звенья подвижно соединяются в нескольких местах, то кинематическая пара является разветвленной, а отдельные части этого соединения называются ветвями кинематической пары [5].
Числом степеней свободы (степенью подвижности) механической системы (твердого тела) называется число независимых между собой возможных перемещений системы. Для двух не связанных кинематической парой звеньев число степеней свободы в относительном движении равно шести: три возможных поступательных перемещения одного звена вдоль координатных осей, связанных с другим звеном, и три вращения вокруг этих осей. После образования кинематической пары, движение одного звена относительно другого уже не может быть произвольным, так как условие постоянного соприкасания звеньев кинематической пары уменьшает число независимых возможных перемещений. Вхождение звена в кинематическую пару с другим звеном налагает на относительные движения звеньев ограничения (связи). Число этих связей S может принимать значение от 1 до 5. При S = 0 кинематической пары не существует, а имеются два звена, движущиеся независимо друг от друга; при S = 6 подвижное соединение звеньев превращается в неподвижное, а вместо двух звеньев образуется одно.
Класс
кинематической пары
соответствует числу связей S, наложенных
на относительное движение звеньев.
Число степеней свободы в относительном
движении звеньев
![]() определяет
вид пары по подвижности. Различают
одно-, двух-,
трех- четырех- и пятиподвижные пары
(табл. 1.1.).
Например,
трехподвижной парой называется
кинематическая пара с тремя степенями
свободы в относительном движении ее
звеньев. Так как
определяет
вид пары по подвижности. Различают
одно-, двух-,
трех- четырех- и пятиподвижные пары
(табл. 1.1.).
Например,
трехподвижной парой называется
кинематическая пара с тремя степенями
свободы в относительном движении ее
звеньев. Так как
![]() , то трехподвижная пара является
кинематической парой третьего класса,
а двухподвижная – четвертого класса.
, то трехподвижная пара является
кинематической парой третьего класса,
а двухподвижная – четвертого класса.
Таблица 1.1.
Возможные комбинации независимых вращательных (В) и поступательных (П) движений в кинематических парах
Кинематические пары
|
Возможные движения |
Одноподвижные |
В П |
Двухподвижные |
ВВ ВП |
Трехподвижные |
ВВВ ВВП ВПП |
Четырехподвижные |
ВВВП ВВПП |
Пятиподвижные |
ВВВПП |
Совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементом кинематической пары. Поэтому кинематическую пару можно рассматривать как соединение двух элементов, каждый из которых принадлежит одному звену.
В ысшей парой называется кинематическая пара, в которой требуемое относительное движение звеньев может быть получено только соприкасанием ее элементов по линиям и в точках. При этом линейный или точечный контакт понимается как первоначальный без учета деформации звеньев. В действительности звенья, образующие высшую пару, соприкасаются по некоторой поверхности, называемой пятном контакта. Низшей парой называется кинематическая пара, в которой требуемое относительное движение звеньев может быть получено постоянным соприкасанием ее элементов по поверхности. Фактическое соприкасание звеньев, образующих низшую пару, может быть как по поверхности, так и по линиям, и в точках. Важным преимуществом низших пар, по сравнению с высшими, является возможность передачи больших сил, поскольку контактная поверхность соприкасающихся звеньев низшей пары может быть весьма значительна. Но число низших пар ограничено и с их помощью не удается реализовать все требуемое многообразие относительных движений звеньев.
Кинематическая пара существует, если ее элементы соприкасаются, т.е. если она замкнута. Различают силовое и геометрическое замыкание кинематических пар. Элементы геометрически замкнутой пары не могут отделяться друг от друга из-за конструктивных особенностей. При силовом замыкании контакт звеньев обеспечивается действием сил: тяжести, упругости пружины, инерции, давления жидкости и газа и т.д. Низшие кинематические пары (вращательная, поступательная, винтовая, цилиндрическая, плоскостная и сферическая ) выполняются, как правило, с геометрическим замыканием, а высшие – с силовым.
Н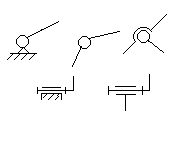 аибольшее
применение в механизмах получила
вращательная
пара (цилиндрический
шарнир, шарнир) - одноподвижная пара,
допускающая вращательное
движение одного звена относительно
другого (рис.1.1). Одноподвижная пара
(табл.1.2), допускающая прямолинейно
– поступательное движение
одного звена относительно другого
называется поступательной
парой.
Последней одноподвижной парой является
винтовая
пара,
допускающая винтовое
движение одного звена относительно
другого (табл. 1.2.). Относительное вращение
звена (винта или гайки) вокруг своей
оси связано с помощью резьбы с его
линейным относительным перемещением
вдоль оси.
аибольшее
применение в механизмах получила
вращательная
пара (цилиндрический
шарнир, шарнир) - одноподвижная пара,
допускающая вращательное
движение одного звена относительно
другого (рис.1.1). Одноподвижная пара
(табл.1.2), допускающая прямолинейно
– поступательное движение
одного звена относительно другого
называется поступательной
парой.
Последней одноподвижной парой является
винтовая
пара,
допускающая винтовое
движение одного звена относительно
другого (табл. 1.2.). Относительное вращение
звена (винта или гайки) вокруг своей
оси связано с помощью резьбы с его
линейным относительным перемещением
вдоль оси.
К
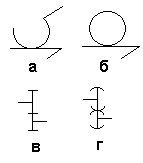
Рис.1.2.
Условные обозначения
высших пар: а – цилиндр - плоскость; б
– шар - плоскость; в – четырех-подвижное
зубчатое зацепление; г
– пятиподвижное зубчатое зацепление;
Рис.1.1.
Условные
обозначения вращательной пары
Трехподвижная сферическая пара (сферический шарнир) допускает сферическое движение одного звена относительно другого (табл. 1.2) и запрещает линейные перемещения вдоль трех осей. Плоскостной парой называется трехподвижная пара, допускающая плоское движение одного звена относительно другого (табл. 1.2).
Таблица 1.2