

1.5. Кинематические соединения
Кинематическая пара может иметь несколько конструктивных исполнений. Например, элементами плоскостной пары могут быть поверхности (табл.1.2), точки (рис.1.3) и линии. Кинематическая цепь, конструктивно заменяющая в механизме кинематическую пару, называется кинематическим соединением. Проблема выбора кинематических соединений (конструктивного оформления кинематических пар) возникает при переходе от схемы механизма к его конструкции.
К онструкторы на практике при проектировании подвижных соединений часто сталкиваются с противоречием между необходимостью реализовать требуемое относительное движение двух звеньев и нецелесообразностью это выполнить с помощью кинематических пар. В таких случаях применяются кинематические соединения двух звеньев, в которых между звеньями размещают дополнительные твёрдые тела (промежуточные элементы),считающиеся абсолютно твердыми или гибкими или упругими. (Гибкие элементы (ремни, канаты, стальные ленты) учитываются не как звенья, а как связи кинематических пар, соединяющих два жестких звена. Не считаются звеньями и упругие элементы: пружины, виброизоляторы, резиновые втулки, позволяющие передавать силы определенной величины и направления, не ограничивая при этом перемещений). Многозвенные кинематические соединения применяются вместо двухзвенных для упрощения конструкции подвижного соединения, снижения его стоимости, уменьшения трения и износа, повышения прочности. Например, радиальный шариковый подшипник качения (рис.1.5), состоящий из внутреннего 3 и наружнего 1 колец, тел качения 2 и разделяющего и направляющего шарики сепаратора (не показан), широко используется на практике вместо вращательной (рис. 1.5, а) и цилиндрической (рис. 1.5, б) кинематических пар. Сферический подшипник качения, допускающий повороты внутреннего кольца относительно наружнего во всех направлениях, применяется вместо сферической кинематической пары. В механизмах вместо неконструктивной двухподвижной сферической пары используется более простой в изготовлении и надежный в эксплуатации шарнир Кардана (рис.1.6).











Рис.
1.5. Схемы
кинематических соединений, конструктивно
заменяющих: а
– вращательную пару; б
– цилиндрическую пару
Рис.
1.6. Схема
кинематического соединения, конструктивно
заменяющего двухподвижную сферическую
пару



А втор
- Что изображено
на рис. 1.1. – 1.3?
втор
- Что изображено
на рис. 1.1. – 1.3?
Ч итатель - ??? На рисунках представлены условные обозначения кинематических пар. Это следует из текста и из пояснений к рисункам.
Автор - Это вы прочитали, а что вы видите?
Читатель - На каждом рисунке в условных обозначениях изображены??? два звена, подвижно скрепленные в месте их соприкосновения, то есть связанные кинематической парой. Это же кинематическая цепь!
Автор - А как могут двигаться звенья относительно друг друга?
Читатель - На рис.1.1. одно звено может совершать вращательное движение относительно другого, на рис. 1.3. –плоское. Получается, что кинематические цепи эквивалентны по подвижностям соответствующим кинематическим парам и конструктивно их заменяют. Отсюда следует, что изображены на рисунках…. кинематические соединения. Так что же на самом деле изображено на рисунках: кинематические пары, или кинематические цепи, или кинематические соединения?
Автор - И то, и другое, и третье. Каждый увидит то, что захочет увидеть. Возникшая неопределенность объясняется самим понятием кинематической пары, которая, в отличие от звеньев, не является материальным объектом. Понятие кинематической пары оказалось удобным для объяснения поведения соприкасающихся звеньев, но ведь относительное движение звеньев полностью определяется геометрией звеньев в месте их соприкосновения. А как изобразить соединение звеньев, не показывая звеньев? Как изобразить горизонт или рукопожатие, без изображения соответственно, хотя бы частично, земли и неба или двух рук? Поэтому, чтобы изобразить кинематическую пару (соединение двух звеньев) необходимо показывать элементы кинематической пары: точки, линии, поверхности, а чтобы отличать одну пару от другой показывают еще и части звеньев, что равносильно изображению звеньев
.



Рис.
1.7. Схема
пятиподвижного кинематического
соединения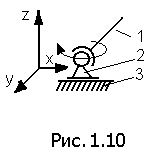


Что есть содержание и форма кинематической пары?