

(
Методы
анализа и синтеза структуры
Теория
структурных групп
Учение о связях
Свойства
связей: -
голономные -
удерживающие -
стационарныеТеория кинематических пар
 методологический
подход)
методологический
подход)
ТЕОРИИ И МЕТОДЫ объяснения
и предсказания явле –
ний,
связанных со
структурой
механизма
НАУЧНЫЕ ФАКТЫ
С
Машина
Механизм
? Кинематические ……………

















Свойства
Динамические
(
Пространственный
Плоская структурная схема
Класс Порядок Вид
Связь
Звено
анализ
синтез
Звено
![]()
![]()
Степени свободы ( )
Плоский

Структурные модели

Плоские


![]()


Кулачковый
Зубчатый
Рычажный








Класс, Формула
строения,
J![]()
![]()

Пространственные
Избыточная связь
Связь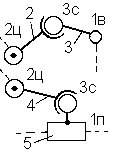


Система ЗВЕНЬЕВ
Система СВЯЗЕЙ
+
W,
q, qτ,
WП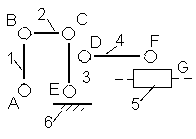




Контрольный тест

Знание только тогда знание,
когда оно приобретено усилиями
своей мысли, а не памятью.
Л.Толстой

Контрольный тест считается выполненным, если правильные решения получены для 11-ти и более заданий (из 17) за время t = 120 мин.
1
 .
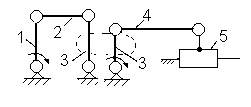
Для плоского механизма (рис.1) найдите
n,
p1П,
W,
qτ,
k,
q,
класс.
.
Для плоского механизма (рис.1) найдите
n,
p1П,
W,
qτ,
k,
q,
класс.
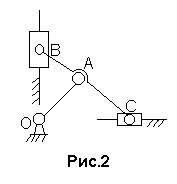
2. В рычажном механизме двигателя Баландина (рис.2) АВ = АС = ОА. Чему равны W, qτ , класс механизма? Укажите правильный ответ среди перечисленных:
а) W = 1, qτ = 1, II класс;
б) W = 2, qτ = 0, II класс;
в) W = 0, III класс, qτ = 0;
г) W = 1, qτ = 0, II класс.
3. Что произойдет с механизмом (рис.2), если соотношение длин звеньев сделать произвольным АВ ≠ АС ≠ ОА ?
А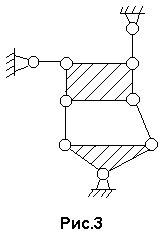 .
В механизме появится еще одна степень
свободы.
.
В механизме появится еще одна степень
свободы.
Б. Механизм превратится в статически определимую ферму.
В. Механизм превратится в статически неопреде- лимую ферму.
Г. Структурные признаки (W, q, класс) останутся без изменения.
4. Сущность механизма заключается:
а) в передаче сил;
б) в преобразовании энергии;
в) в преобразовании движения;
г) в облегчении и замене умственного и физического труда человека.
5. Дайте характеристику кинематической цепи (рис.3):
А. Механизм, W = 2, III класс.
Б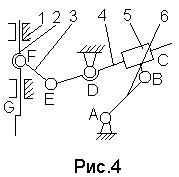 .
Статически определимая ферма.
.
Статически определимая ферма.
В. Механизм, W = 1, qτ= 1, III класс.
Г. Статически определимая ферма, состоящая из двух структурных групп.
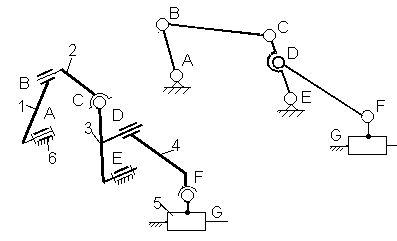
.6. В структурной схеме механизма долбежного станка (рис.4) выделите элементарные механизмы и укажите способ их соединения.
7.* Найдите W, qτ , класс для следующих плоских механизмов:
а) двигателя внутреннего сгорания (рис.5, а);
б) литьевой машины (рис.5, б);
в) схвата манипулятора (рис.5, в);
8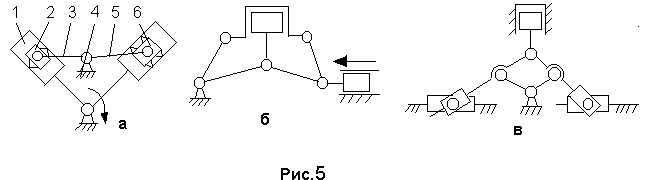 .
Спроектируйте самоустанавливающийся
механизм долбежного станка (рис.4).
Укажите правильное решение среди
перечисленных:
.
Спроектируйте самоустанавливающийся
механизм долбежного станка (рис.4).
Укажите правильное решение среди
перечисленных:
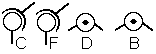
а) А(1в), В(1в), С(1п), D(1в), Е(1в), F(1в), G(1п);
б) А(1в), В(3с), С(2ц), D(1в), Е(1в), F(3с), G(2ц);
в) А(3с), В(3с), С(1п), D(1в), Е(3с), F(3с), G(1п);
г) А(1в), В(3с), С(2ц), D(1в), Е(3с), F(3с), G(1п).
9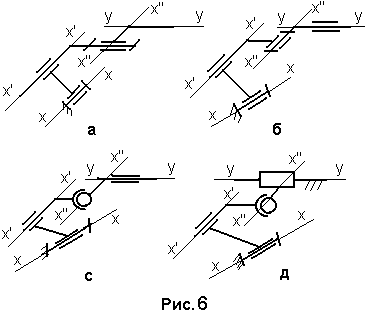 .
В учебнике [ 6 ] для определения числа WП
степеней свободы плоского механизма
приводиться формула WП
= 3n
– 3рн –
рв
, где n
– число подвижных звеньев; рн
и рв
– соответственно количество низших и
высших кинематических пар механизма.
Для каких механизмов расчет по приведенной
формуле дает правильный результат ?
.
В учебнике [ 6 ] для определения числа WП
степеней свободы плоского механизма
приводиться формула WП
= 3n
– 3рн –
рв
, где n
– число подвижных звеньев; рн
и рв
– соответственно количество низших и
высших кинематических пар механизма.
Для каких механизмов расчет по приведенной
формуле дает правильный результат ?
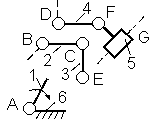
10*. При проектировании плоского самоустанавливающегося механизма получены следующие структурные схемы (рис.6). Укажите, что собой представляет кинематическая цепь изображенная: а) на рис.6, а; б) рис.6, б; в) рис.6, в; г) рис.6, г, если ХХ║Х'Х'║Х"Х" и ХХ ┴ YY ? Укажите правильное решение среди перечисленных.
А. Кинематически неизменяемая система.
Б. Плоский несамоустанавливающийся механизм.
В. Плоский самоустанавливающийся механизм.
Г. Пространственный механизм.
Д. Сферический механизм.
11. Изобразите структурную схему механизма в соответствии с формулой строения
М = I1(1,6)+II3(4,5)+II2(2,3).
= I1(1,6)+II3(4,5)+II2(2,3).
12. Какую плоскую кинематическую пару образуют в плоской схеме звенья 1 и 2 (рис. 5,а) механизма двигателя внутреннего сгорания?
А. Высшую одноподвижную.
Б. Высшую двухподвижную.
В. Низшую одноподвижную.
Г. Низшую двухподвижную

* Задание содержит несколько самостоятельных заданий.