

Опорные точки
Обобщенными координатами механизма называют независимые между собой координаты, определяющие положения всех звеньев механизма относительно стойки.
Число степеней свободы механизма (число независимых между собой возможных перемещений механизма относительно стойки) в механизмах с голономными связями совпадает с числом обобщенных координат.
В механизмах встречаются местные, групповые и мгновенные подвижности (степени свободы).
Контрольные вопросы
Что понимается под лишними степенями свободы?
В каких случаях и почему в механизме могут появиться мгновенные подвижности?
Что такое маневренность манипулятора?
Т еорию механизмов и машин изучают машиностроители всего мира. За рубежом широко распространена учебная специальность машиноведение, например, в США подавляющее большинство инженеров-механиков готовятся в 105 колледжах и университетах именно по этой специальности. Обучение инженера-механика в американском университете ориентировано не на определенную отрасль машиностроения, а на тот или иной комплекс научно-технических проблем, встречающихся в машиностроении. Упор делается на теоретическую подготовку, общенаучные и общетехнические дисциплины, в число которых входит и теория механизмов.
2.4. Плоские, поверхностные и пространственные механизмы
Л юбой механизм является трехмерным объектом. По виду траекторий точек звеньев механизмы разделяют на объемные и поверхностные. Из поверхностных выделяют плоские, сферические и цилиндрические механизмы. Плоским называют механизм, подвижные звенья которого совершают плоское движение, параллельное одной и той же неподвижной плоскости. Точки звеньев плоского механизма описывают траектории, лежащие в параллельных плоскостях. Сферическим называют механизм, в котором все оси вращения звеньев пересекаются в одной точке, а точки звеньев описывают траектории, лежащие на концентрических сферах. Шарнирный четырехзвенник будет плоским механизмом, если оси вращательных пар параллельны (рис. 2.10, а), и сферическим, если оси вращательных пар пересекаются в одной точке (рис.2.10, б). Цилиндрическим называют механизм, точки звеньев которого описывают траектории, лежащие на поверхностях коаксиальных (соосных) цилиндров, например, соосный винтовой механизм.
Н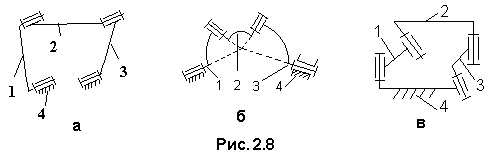 еобходимым
условием существования плоского
механизма является обеспечение всеми
кинематическими парами относительного
движения звеньев в параллельных
плоскостях.
еобходимым
условием существования плоского
механизма является обеспечение всеми
кинематическими парами относительного
движения звеньев в параллельных
плоскостях.
П
Рис.
2.10. Шарнирные
четырехзвенники: а – плоский; б –
сферический;
в – пространственный механизм Беннета

Знаете ли вы, что возможность существования объемного четырехзвенника (механизма Беннета) была теоретически доказана спустя почти два десятилетия после его появления.
С амыми распространенными являются плоские механизмы, которые в основном и изучаются в курсе «Теория механизмов». При исследовании движения плоских механизмов достаточно использовать его плоскую структурную схему, на которой представлен не сам механизм, а его изображение на плоскости (рис. 2.11).
В
плоской
структурной
схеме
сферическая пара изображается как
вращательная, а цилиндрическая в
зависимости от ее ориентации в пространстве
- как поступательная или вращательная.
Это возможно потому, что связи,
в том числе
избыточные, в поверхностных механизмах
разделяются н
Рис.
2.11.
Пространственная и плоская структурные
схемы механизма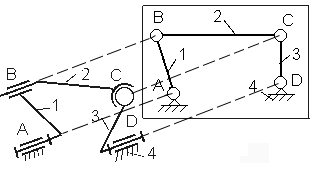 а
нормальные,
ограничивающие
перемещения перпендикулярные к
поверхности,
и тангенциальные,
ограничивающие
движения изображений звеньев на
поверхности. Т
а
нормальные,
ограничивающие
перемещения перпендикулярные к
поверхности,
и тангенциальные,
ограничивающие
движения изображений звеньев на
поверхности. Т
Таблица 2.1