

1 Общие сведения
Во время движения автомобиля при вращении несбалансированного колеса возникают центробежные силы, вызывающие вибрацию колеса. Это ведет к усиленному износу шин, деталей ходовой части, рулевого управления, нарушаются углы установки колес.
Дисбаланс колес складывается из дисбаланса диска и шины.
Исходя из теории балансировки тел вращения, на дисбаланс шины с диском в сборе влияет:
неравномерное распределение массы материала по окружности шины, обода и диска;
эксцентриситет колеса;
размеры вертикального паза и вес вентиля;
размера катетов сварочных швов в различных точках окружности.
Различают статическую и динамическую несбалансированность.
Статическая несбалансированность вызвана неравномерным распределением массы относительно оси вращения колеса, в связи, с чем центр тяжести колеса оказывается смещенным с оси колеса.
Динамическая несбалансированность вызвана неравномерным распределением массы относительно вертикальной плоскости, проходящей через центр тяжести колеса и его ось.

Статический дисбаланс
Динамический дисбаланс
Кроме неравномерного распределения массы по шине, на дисбаланс колеса в значительной степени влияет его радиальное и осевое биение. Биение колеса может явиться результатом неточности изготовления (овальность, эксцентриситет, перекос диска), либо следствием нарушения его геометрии в процессе эксплуатации или неточности установки колеса на ступице.
Зачастую биение колес увеличивается после деформации обода или диска во время демонтажно-монтажных работ, или при сильных ударах колес о неровности дороги и дорожных предметов.
2 Назначение балансировочной установки
Станок балансировочный 88.13.001 предназначен для статической и динамической балансировки колес легковых автомобилей в двух плоскостях коррекции.
Балансировка осуществляется одним измерением для обеих плоскостей коррекции с одновременным указанием мест установки балансировочных грузиков и их масс.

3 Устройство и принцип работы
3.1 Станок представляет собой стационарную установку. Внешний вид станка показан на рис. 1
3.2 В корпусе поз.1 размещены шпиндельный узел поз.2, привод вращения шпинделя поз.3, силовой блок поз.4
3.3 Шпиндельный узел поз.2 предназначен для придания колесу вращательного движения, преобразования дисбаланса колеса в соответствующие его величине и угловому положению электрические сигналы.
3.4 Силовой блок поз.3 предназначен для коммутации электропривода станка, а также для защиты электрооборудования.
3.5 На корпусе станка поз.1, установлен пульт управления поз.5, предназначенный для ввода данных, обработки результатов измерения и вывода их на индикацию.
3.5.1 Ввод данных и команд в станок осуществляется с помощью клавиатуры. Контроль ввода данных и результатов работы станка производится визуально с помощью 6-ти разрядной индикации. Стрелки указывают направление вращения колеса для поиска места установки балансировочных грузиков.
3.5.2 Назначение клавиш:
–
0
9
![]()
– D, диаметр окружности, проходящей через центры балансировочных грузиков, мм;
– ![]()
![]() В,
расстояние между плоскостями коррекции,
проходящими через центры балансировочных
грузиков, мм;
В,
расстояние между плоскостями коррекции,
проходящими через центры балансировочных
грузиков, мм;
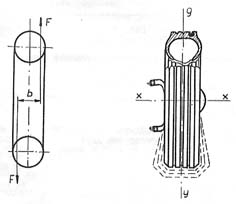
– Н, расстояние от датчика до левой плоскости коррекции, измеряется с помощью шкалы поз.8 и выдвижного стержня поз.9 , мм;
–
F
3.5.2 Станок может работать в одном из режимов:
статическая балансировка (одна плоскость коррекции);
динамическая балансировка (две плоскости коррекции);
работа с тестами.
3.5.3 Перечень функций и соответствующих им режимов работы и тестов:
F 1 - тест проверки коэффициента усиления усилителя левого датчика;
F 2 - тест проверки коэффициента усиления усилителя правого датчика;
F 3 - тест измерения периода вращения шпинделя в относительных единицах;
F 4 - тест проверки клавиатуры;
F 5 - тест проверки смещения фазы правого датчика;
F 6 - тест проверки смещения фазы левого датчика;
F 7 - режим статической балансировки;
F 8 - тест проверки индикации;
F 13 - тест проверки смещения "нуля" усилителя левого датчика;
F 14 - тест проверки смещения "нуля" усилителя правого датчика;
F 15 - функция, позволяющая переключать балансировочный станок на режим с округлением результатов и без округления;
F 16 - функция, позволяющая переключать балансировочный станок на работу независимо от положения кожуха и обратно;
F 17 - тест проверки ОЗУ методом бегущих "1" и "О";
F 18 - тест проверки ОЗУ методом чтения, записи по байтам (позволяет определить неисправную микросхему ОЗУ);
F 19 - тест проверки ОЗУ методом сравнения адреса и содержимого;
F 20 - тест проверки ПЗУ.
3.6 На валу шпиндельного узла поз.2 установлен механизм крепления колеса поз.6
3.7 Для обеспечения безопасной эксплуатации станка к корпусу поз.1 крепится кожух поз.7
3.8 В основу определения величины и места расположения на колесе дисбалансных масс положен принцип возникновения разности центробежных сил, расположенных несимметрично относительно оси профиля шины.
3.9 При балансировке шпиндель станка с закрепленным на нем колесом раскручивается электродвигателем через ременную передачу до 540 об/мин. Неуравновешенная масса колеса вызывает механические колебания шпинделя, которые через корпус подшипников шпинделя передаются на два пьезоэлектрических датчика, преобразующих их в электрические импульсы. Электрические импульсы поступают в электронно-измерительный блок, на выходе из которого на цифровом табло высвечиваются показания массы дисбаланса (в граммах). Угол поворота колеса определяется с помощью датчика угла и градуированных дисков, вращающихся на одном валу с колесом.
3.10 Балансировка грузиками ведется в двух плоскостях колеса (плоскостях коррекции) - по внешней и внутренней сторонам.