

2Определение частоты вращения смесительного
барабана гравитационного бетоносмесителя.
Pi+Fтр≤Gsinα
F – сила трения
G- сила тяжести. G =mg.
Fтр= Gcosα*f
f = коэф.трения бетона по стали.
mw2*Rвн+fGcosα≤Gsinα
w2Rвн≤gsinα-fgcosα
w – угловаяскорость.рад/сек.
Rвн-внутрений радиус.м
w = √g(sinα-fcosα)/Rвн
√-корень кВ.
w =2πn
n =w/2π = √g(sinα-fcosα)/Rвн
n =2π√g(sinα-fcosα)/Rвн
3. Экскаваторы-планировщики могут быть полноповоротными и неполноповоротными. Полноповоротные экскаваторы выпускаются на гусеничном и пневмоколесном ходовых устройствах, непол-ноповоротные — на шасси автомобильного типа.
Механизм поворота платформы полноповоротных машин приводится в действие либо низкомоментнымаксильно-поршневым гидромотором через двухступенчатый зубчатый редуктор (у гусеничных машин), либо высокомоментнымгидромотором через зубчатую передачу, состоящую из обегающей шестерни ( крепится непосредственно на валу гадромотора) и зубчатого венца, изготовленного заодно с роликовым опорно-поворотным устройством (у пнев-моколесных машин).
Поворот платформы неполноповоротного экскаватора вокруг вертикальной оси на 180—270° производится двумя гидроцилиндрами через цепную передачу. Гидроцилиндры закреплены на поворотной платформе. Штоки гидроцилиндров соединены между собой двухрядной роликовой цепью, огибающей двухрядную цепную звездочку, жестко прикрепленную к опорному кругу. Аналогичная конструкция показана на рис. 6.26, б.

Рис. 6.32. Кинематические схемы механизмов поворота рабочего органа вокруг продольной оси стрелы: а—поворот непосредственно гидроцилиндром; б — поворот гидроцилиндром через зубчатую передачу
Привод механизма передвижения полнотюворотных экскаваторов-планировщиков — гидравлический, неполноповоротных — механический (используется механическая трансмиссия базовой машины-автомобиля). Ходовые устройства полноповоротных гусеничных и пневмоколесных экскаваторов-планировщиков и экскаваторов с шарнирно-сочkененным рабочим органом аналогичны по конструкции (см. рис. 6.23).
Гидравлическая система большинства экскаваторов-планировщиков имеет три автономных потока (трехпоточная система). Каждый из трех потоков (рис. 6.33) питается от индивидуального шестеренного или аксиально-порш/невол) гидронасоса постоянной производительности и обслуживает один или одновременно несколько гидродвигателей рабочего оборудования.
Трехпоточная система гидропривода обеспечивает выполнение пяти рабочих движений, три из которых можно совмещать: при планировочных работах —выдвижение (втягивание) стрелы, ее подъем, (опускание) и поворот ковша; при повороте на выгрузку (в забой) — подъем (опускание) стрелы, ее выдвижение и поворот платформы.
Рабочее давление в гидросистеме экскаваторов с телескопическим рабочим оборудованием составляет 120—160 кгс/см2 (12—16 МПа) у полноповоротных машин и 75—85 кгс/см2 (7,5—8,5 МПа) —у неполноповоротных.
Пт — до 68,5 м3/ч; мощность силовой установки — до 75 л. с. (55 кВт); масса машины — до 18,4 т.
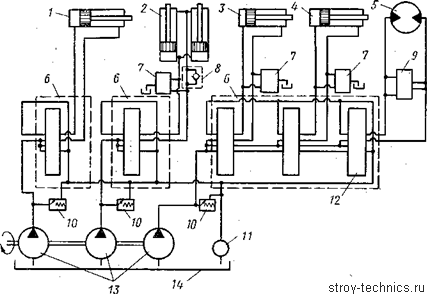
Рис. 6.33. Принципиальная трехпоточная схема гидропривода рабочего оборудования и механизмов поворота экскаватора-планировщика:
