

Шагающе-рельсовое ходовое оборудование
Разработано в 1960-62 г в СССР с целью устранения недостатков гусеничного и рельсового ходов и сочетание их преимуществ.
Применяется шагающее-рельсовый ход для мощных экскаваторов.
Схема шагающее-рельсового хода
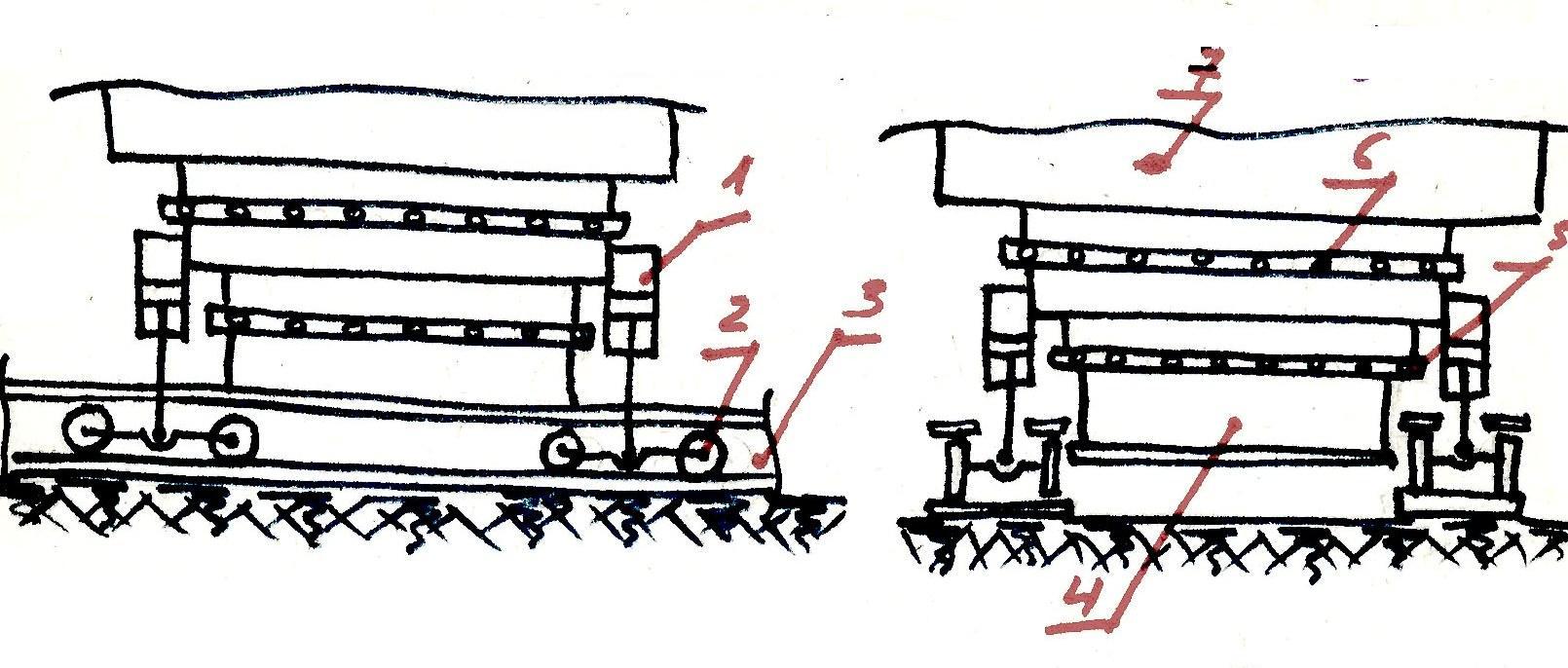
1-гидроцилиндр; 5 - нижний поворотный круг; 2-тележка; 6 - верхний поворотный круг;
3-опорная балка; 7 – поворотная платформа
4-база;
Во время работы экскаватор через гидродомкраты (1) опирается на четыре тележки (2), перемещающимся по рельсам укрепленным на балках (3).
Когда весь запас хода по балкам исчерпан, экскаватор опускается на почву базой (4), а тележки вместе с балками поднимается (теми же гидродомкратами). После этого балки выдвигаются вперед, затем их опускают на грунт и поднимают базу.
Перемещение балок и экскаватора производится с помощью канатной тяги.
Экскаватор имеет 2а опорно-поворотных круга. Нижний круг служит для поворота балок и изменения направление перемещение машины, а верхний – исполняет обычное назначение.
Достоинства шагающее-рельсового хода в сравнении с гусеничным. 1) Улучшается проходимость машины из-за более равномерного давления на грунт. 2) Повышается маневренность машины благодаря повороту на месте вокруг
собственной оси на любой угол.
3) Уменьшаются энергозатраты на перемещение машины.
4) Увеличивается долговечность хода. Более спокойно и плавно движется машина.
5) Возможность перемещения на малые расстояния с большой точностью.
Недостатки:
-
Цикличность действия
-
Некоторое усложнение конструкции из-за наличия 2го опорно-поворотного устройства и подъемных гидроцилиндров. (Более сложное, чем 2хгусеничное, но не сложнее многогусеничного)
Шагающе-рельсовое оборудование целесообразно применять вместо многогусеничного на экскаваторах весом > 600т.
Рельсово-гусеничное ходовое оборудование применяется с 1962 г. на Западногерманских экскаваторах фирмы «Букау-Вольф».
Ходовое оборудование такого типа состоит из нескольких гусеничных тележек, на которые опирается экскаватор.
Гусеничные ленты тележек не имеют приводных звездочек. Они выполняют роль шпал железнодорожного полотна, а приливы на их внутренней стороне заменяют рельсы. Нижние опорные катки имеют принудительные привод. Перемещение экскаватора осуществляется за счет трения между опорными катками и приливами на внутренней стороне трапов.
При движении гусеничная лента не испытывает растяжения


Достоинства в сравнении с гусеничным ходом: 1) при повороте гусеница не зарывается в грунт; 2) меньшие затраты энергии на передвижение машины и меньший износ ленты и катков; 3) меньшие габариты и вес.
Недостатки:
1)
худшая маневренность машины (R
разворота
![]() 100
м для экскаваторов фирмы «Букау-Вольф»);
2)
сложность конструкции; 3)
меньший продлеваемый уклон.
100
м для экскаваторов фирмы «Букау-Вольф»);
2)
сложность конструкции; 3)
меньший продлеваемый уклон.
Лекция 20
5.15.5. Определение основных параметров роторных экскаваторов
1) Диаметр ротора:
![]() (формула МИСИ),
(формула МИСИ),
где
![]() -
теоретическая производительность
экскаватора,
-
теоретическая производительность
экскаватора,
![]() ;
;
2) Длина роторной стрелы:
а) шарнирной
![]()
б) выдвижной
![]()
3) Скорость вращения ротора :
![]() ;
;
![]() м;
м;
4) Число ковшей на роторе:
![]() ,
шт,
,
шт,
![]() -
-![]()
5) Начальная скорость поворота роторной стрелы:
![]()
![]()
![]()
где n- число разгрузок ковшей в минуту:
![]() ;
;
![]() коэффициент
формы ковша;
коэффициент
формы ковша;
![]() (большее значение
для ковшей косого резания);
(большее значение
для ковшей косого резания);
![]() угловая высота
забоя (стружки);
угловая высота
забоя (стружки);
![]() радиус
ротора, м;
радиус
ротора, м;
6) мощность привода ротора:
![]() кВт;
кВт;
где
![]() удельное сопротивление породы копанию,
удельное сопротивление породы копанию,
![]() ,
(обычно
,
(обычно
![]() ).
).
![]() -
объемная плотность породы,
-
объемная плотность породы,
![]() ;
;
![]() высота
подъема породы, м:
высота
подъема породы, м:
![]()
![]() высота
стружки
высота
стружки
![]()
![]() коэффициент,
равный 0,8 ÷0,9;
коэффициент,
равный 0,8 ÷0,9;
![]() коэффициент,
разрыхления породы,
коэффициент,
разрыхления породы,
![]()
![]() к. п. д. привода
ротора,
к. п. д. привода
ротора,
![]()