

5.11. Механизмы и аппаратура управления
На экскаваторах применяются следующие способы управления:
- ручное; - гидравлическое; - пневматические;
- комбинированные (электро-гидравлические, электро-пневматические)
5.11.1. Ручное управление применяется только на экскаваторах малой мощности
Недостатки :
- необходимость затраты больших мускульных усилий;
- отсутствие и плавность и быстроты включения.
5.11.2. Гидравлическое управление применятся на однодвигательных экскаваторах небольшой мощности, где протяженность гидравлических коммуникаций сравнительно невелика:
Достоинства: - компактность исполнительных цилиндров;
- быстрота действия;
- плавность включения;
Недостатки:
- система зависит от температуры среды; - чувствительна к засорению;
- частые утечки масла.
5.11.3. Пневматическое управление применяются на таких же экскаваторах, что и гидравлическое.
Достоинство:
- плавность включения
- меньшая длина трубопроводов, чем при гидравлическом (нет обратного трубопровода)
- система не чувствительна к малым утечкам воздуха и не загрязняется
Недостатки: - трудность обнаружения мест утечки воздуха; - значительные габариты исполнительных пневмоцилиндров; - сложность все системы в целом (компрессоры, воздухосборники, фильтры)
5.11.4. Электрическая система применяется для управления контакторами
электрических цепей экскаваторов.
5.11.5. Электрогидравлическая и электропневматическая системы управления отличаются от чисто гидравлической и пневматической значительным сокращением подводящих трубопроводом. Включение исполнительных цилиндров производится золотниками, управление которыми осуществляется электромагнитами. Применяются эти системы на экскаваторах средней мощности и мощные.
Лекция 16
5.12. Статический расчет одноковшовых экскаваторов
Статическим расчетом определяется уравновешенность поворотной платформы и устойчивость экскаватора.
Уравновешивание поворотной платформы достигается соответствующим размещением всех механизмов на платформе и выбором соответствующего противовеса.
Размеры противовеса рассчитываются для двух положений экскаватора:
-
для груженого ковша, выдвинутого на 2/3 вылета рукояти;
-
для ковша опущенного на почву (вес ковша и рукояти не создает момента ).
Схема 1 к статическому расчету прямой лопаты
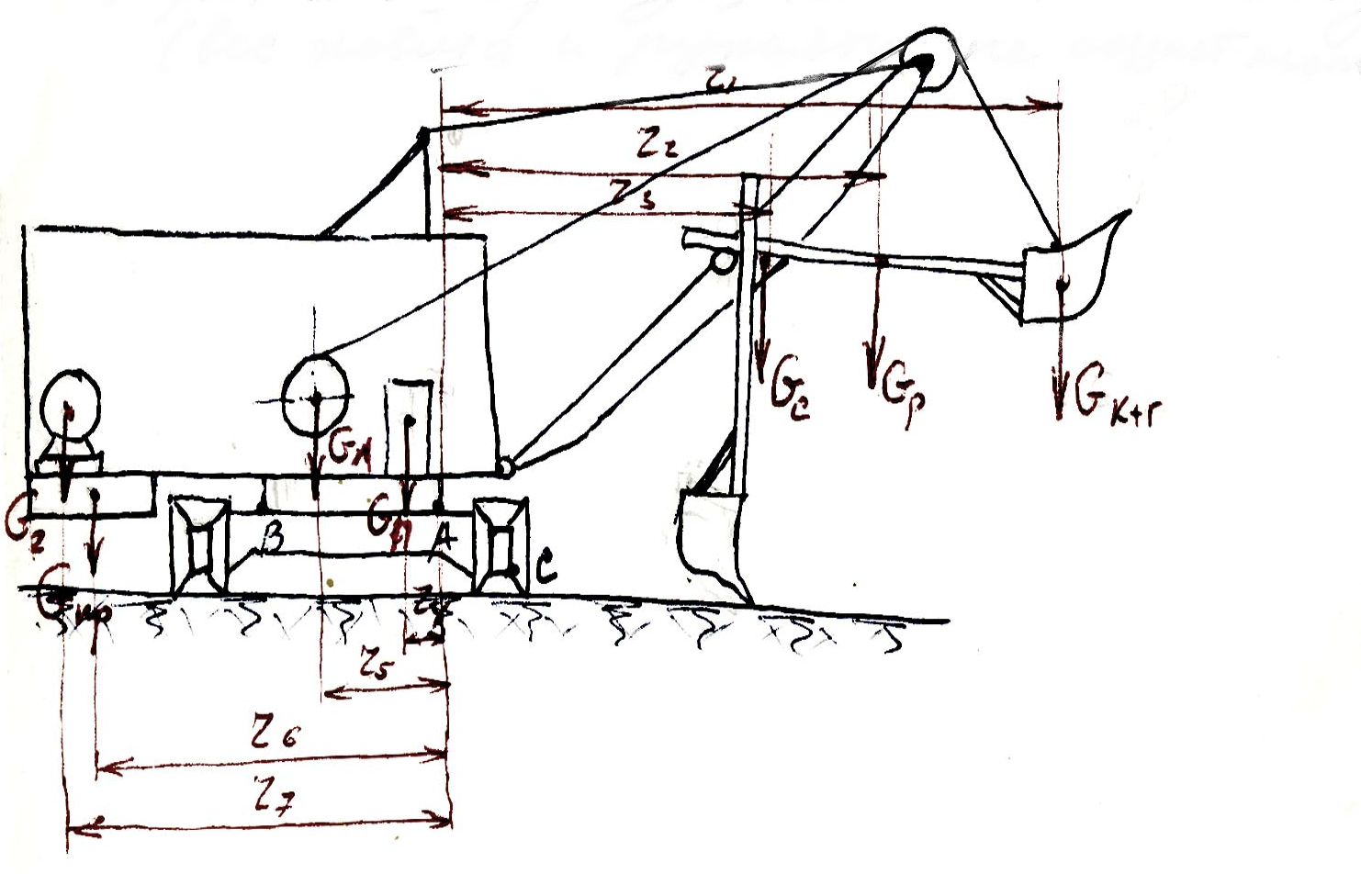
Размер противовеса определяется из уравнения моментов относительно точки А, а затем относительно точки В.
Уравнение моментов относительно А и рукояти выдвинутой на 2/3, позволяет определять минимальный размер противовеса:
![]() ,
,
где
![]() -
силы веса отдельных узлов экскаватора
;
-
силы веса отдельных узлов экскаватора
;
![]() -
плечи действия сил относительно точки
А (по схеме1).
-
плечи действия сил относительно точки
А (по схеме1).
Из этого уравнения и определяется минимальная величина G’np. Аналогичным способом составляются уравнения моментов относительно точки В для второго случая (ковш опущен на землю) и определяется максимальная величина противовеса G’’np.
При решении уравнений возможно 3 случая:
1)G’np < G’’np;
2) G’np = G’’np;
3) G’np > G’’np.
В первом и втором случаях принимается противовес G’np. В третьем случае нужно сделать одно из следующих мероприятий:
1) изменить размещение механизмов на поворотной платформе так, чтобы G’np ≤ G’’np;
2) увеличить диаметр поворотного круга;
3) уменьшить размеры рабочего оборудования.
Устойчивость
экскаватора проверяется расчетом при
работе и передвижении. В рабочем положении
устойчивость гусеничного экскаватора
с оборудованием прямой лопаты
рассчитывается при роботе поперек
гусениц. Моменты опрокидывающий
![]() и удерживающий
и удерживающий
![]() рассчитывается по отношению к оси,
проходящей по краю опорных катков (точка
С).
рассчитывается по отношению к оси,
проходящей по краю опорных катков (точка
С).
Расчет ведется для двух случаев:
-
отрыв тяжелого препятствия встреченного в забое;
-
наиболее не благоприятный случай нормальной работы;
Первый случай. Принимается средний вылет величины рукояти по схеме 2:
Схема 2 к статическому расчету прямой лопаты

При котором подъемный канат имеет вертикальное положение; стрела наклонена под углом 45º к горизонту, экскаватор стоит на горизонтальной площадке, ковш пуст.
Вначале
определяется усилие в канате
![]() исходя из мощности двигателя подъемной
лебедки. Затем из уравнения моментов
относительно оси напорного вала
определяется максимальное усилие
исходя из мощности двигателя подъемной
лебедки. Затем из уравнения моментов
относительно оси напорного вала
определяется максимальное усилие
![]() на зубьях ковша.
на зубьях ковша.
Опрокидывающий момент представляет собой сумму произведений Рпол.max, веса ковша Gк, рукояти Gр и стрелы Gс на соответствующие радиусы, а удерживающий момент создается весом всех частей экскаватора, находящихся слева от точки С.
![]()
![]()
Коэффициент устойчивости равен:
![]()
Значение К > 1,1 указывают на завышенный вес экскаватора.
Второй случай: принимается груженный ковш при полном вылете, расположенной горизонтально.
Усилие на зубьях ковша Рпол.max определяется, как и в предыдущем случае. Этот случай соответствует концу копания, когда ковш выводится из грунта и сила напора действует на “себя”. В расчет принимается обычно ½ Рпол.max определенной по мощности напорного двигателя (для крупных моделей принимают полное значение Рпол.max)
Коэффициент устойчивости, как и в первом случае должен быть:
![]()
Устойчивость при движении рассчитывается при движении на подъем и под углом. В общих случаях учитывается давление ветра равное 245 Па действующее в направлении, уменьшающем устойчивость экскаватора.
Для движения на подъем, стрела берется под минимальным углом (30º) рукоять на максимальном вылете с опущенным ковшом.
При движении под уклон стрела берется под максимальным углом, рукоять весит вертикально.