

5.10. Силовое оборудование одноковшовых экскаваторов
У одноковшовых экскаваторов в зависимости от их мощности и назначения могут применятся следующие типы силового оборудование:
- дизельное;
- электрическое;
- комбинированные
 дизель-электрическое
дизель-электрическое
дизель-гидравлическое
5.10.1.
Дизельный
привод
применяется
на быстропередвигающихся экскаваторах
небольшой
мощности
с емкостью ковша до 1,5
![]() (строительные экскаваторы)
(строительные экскаваторы)
Достоинства привода:
-
Не зависит от электрической сети;
-
Обеспечивает маневренность машины;
Недостатки привода:
-
Не обладает большой перегрузочной способностью и
саморегулированию;
-
Не реверсируется и не может сам трогаться с места (нужно иметь механизмы реверса и фрикционные муфты)
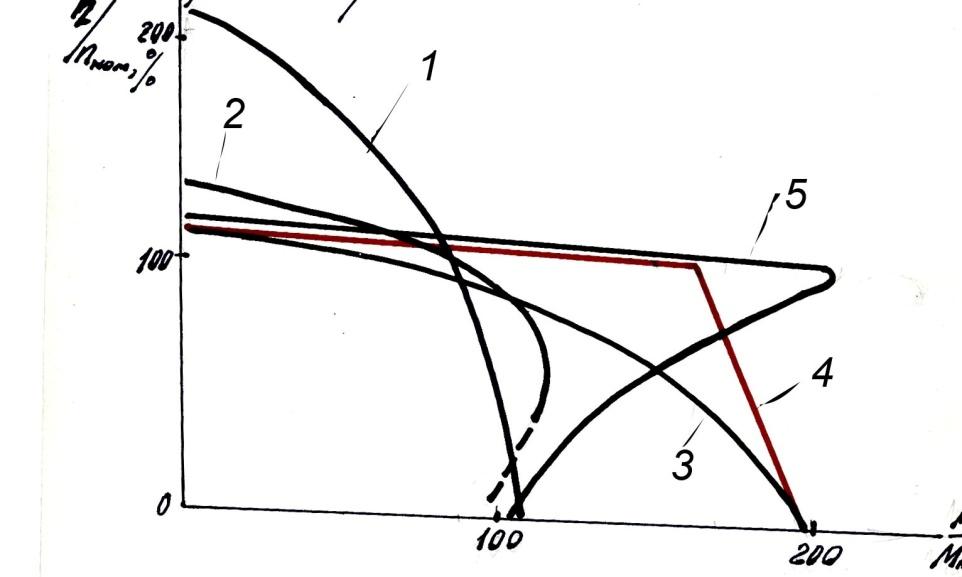
Для сравнения различных приводов будем изображать на графике их механические характеристики.
-
Паровая машина без регулятора
-
Дизель с регулятором подачи топлива
-
Привод по системе ТГ-Д
-
Привод по системе ГД-ЭМУ , ГО-СМУ
-
Электрический двигатель переменного тока
За 100% приняты номинальная скорость вращения и номинальная мощность.
5.10.2. Паровая машина имеет мягкую характеристику и не может обеспечивать устойчивую работу механизмов в экскаватора. Увеличение нагрузки на привод приводит к резкому снижению скорости вращение его как следствие приводит к снижению производительности экскаватора.
5.10.3. Дизельный привод также мало пригоден для экскаватора
С увеличением нагрузки на привод скорость вращение его также как и для паровой машины снижается но с меньшей интенсивностью.
При превышении некоторого значения нагрузки начинают интенсивно падать не только скорость вращения, но и момент развиваемым дизелем.
После перегрузки необходимо освобождать привод от нагрузки с тем, чтобы двигатель снова смог набрать номинальные обороты.
5.10.4. Электрический привод нашел широкое распространение на карьерных экскаваторах.
Он обладает: 1) большой перегрузочной способностью; 2) прост в обслуживании; 3) легко управляем.
Энергия к экскаватору подается по гибкому высоковольтному кабелю (U=1000в , U=6000 В или 10000 В)
Для питания электродвигателей исполнительных механизмов применяются как переменный, так и постоянный ток.
а). Электрический привод на переменном токе может быть:
- однодвигательный
- многодвигательный
При
однодвигательном приводе переменного
тока все механизмы экскаватора приводится
в действие от одного асинхронного
двигателя с короткозамкнутым или фазным
ротором. При этом системе привода
получаются весьма громоздкие механические
передачи. Привод применяется на
строительных экскаваторах (с q![]() 2
2 ![]() ) Э-1251
) Э-1251
Асинхронный двигатель переменного тока имеет очень жесткую характеристику, но не обладает в достаточной степени саморегулирующей способностью.
При увеличении нагрузки после некоторого предела момент развиваемым двигателем резко падает и перегруженный двигатель не может вновь развернутся (см. график)
Однако надежность и долговечность асинхронных двигателей и их небольшая стоимость заставляют искать пути применения этого привода.
Многодвигательный привод переменного тока в СССР распространения не получил.
б). Привод на постоянном токе, как правило, многодвигательный выполняют по следующим системам:
- по системе ТГ-Д (трехобмоточный генератор-двигатель);
- по системе ГД-ЭМУ (генератор-двигатель-электромашинный усилитель);
- по системе ГД-СМУ (генератор-двигатель-силовой магнитный усилитель);
- тирристорный привод (внедряется).
Недостатки привода ТГ-Д:
1 –наличие 3-х обмоток приводит к увеличению размеров и веса генераторов;
2- механическая характеристика привода недостаточно жесткая (коэффициент заполнения =0,7)
3 – Медленное протекание переходных процессов
Из-за этих недостатков ТГ-Д в настоящее время не применяется
5.10.5. Комбинированный привод
К комбинированному приводу относится такие типы привода:
- дизель-электрический;
- дизель-гидравлический;
- электрогидравлический.
Дизель-электрический привод применяется обычно по схеме Д-Г-Д, только здесь асинхронный двигатель заменяется дизелем. Он независимо от электрической сети.
Широкому распространению препятствует сложность конструкции и эксплуатации
Дизель-гидравлический и электрогидравлический применяются обычно с использованием либо динамического гидропривода (гидромуфта вместо фрикциона) либо обьемного гидропривода (по схеме двигатель-насос-гидромотор, двигатель-насос-гидроцилиндр)
Эти типы привода надежны, не боятся перегрузок, позволяют регулировать в широких пределах скорость рабочих механизмов, но дороги требует квалифицированного обслуживания.