

5.7.8. Эксцентриковый механизм шагания
 приводной
вал; 2
– ходовое колесо (эксцентрик); 3
– палец-ползун ходового колеса (ролик);
4
– направляющая рама (башмак); 5
– лыжа
приводной
вал; 2
– ходовое колесо (эксцентрик); 3
– палец-ползун ходового колеса (ролик);
4
– направляющая рама (башмак); 5
– лыжа
За один оборот вала эксцентрик передвигается на 2(Е+r).
Эксцентриковый ход применяется на экскаваторах Новокраматорского машиностроительного завода (ЭШ-1, ЭШ 4/40), а за рубежом на драглайнах фирмы «Бюсайрус-Ири». Он сложен имеет большой вес ходового вала, на надежен.
5.7.9.
Рычажно-гидравлический механизм шагания
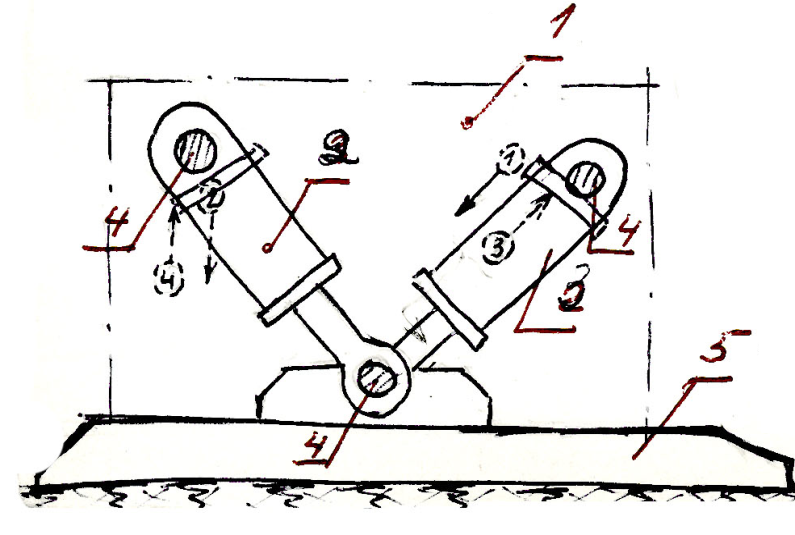
1 – поворотная платформа;
2 – подъемный гидроцилиндр двойного действия; 3 –толкающий гидроцилиндр двойного действия;
4 – шарнир; 5 – лыжа
Во время работы экскаватора поршни всех цилиндров втянуты внутрь, опорные башмаки поднятии, а поворотная платформа опирается на нижнюю опорную раму. При шагании под действием подъемных и толкающих цилиндров опускаются на землю.
При возрастании давления в подъемных цилиндрах один конец подъемной рамы приподнимается. Затем опорная рама с помощью толкающих цилиндров подтягиваются к лыжам . экскаватор опираясь на лыжи и скользя рамой по грунту передвигаются на величину шага равную 1-2.5 м. Затем подъемные цилиндры поднимают опорные лыжи вверх и процесс повторяется.
Давление
масла в гидроцилиндрах достигает 20.0
кг/![]() .
.
Гидравлический
ход применяется в экскаваторах УГЗМ :
ЭШ 14/75, ЭШ 15/90, ЭШ 25/100 . Американские фирмы
«Бюсайрус» и «Марион» по примеру УГЗМ
начинают применять гидравлические
механизмы шагания для драглайнов с
ковшами 168-191 ![]() .
.
-
С
-
Поворотная платформа
-
Стойка
-
Кривошип
-
Серьга
-
Опорная база
-
Опорный башмак (лыжа)
-
Стрела
Перемещение экскаватора происходит за счет кривошипа АО, вокруг оси О, при этом серьга ВО2 совершает колебательные движения вокруг точки О2 являясь второй точкой опоры для стойки.
хема кривошипно-рычажно шагающиего хода -


Лекция 14
5.8. Тяговый расчет гусеничного хода
При определении мощности двигателя гусеничного хода следует рассматривать два режима работы:
-
длительный (при передвижении экскаватора по горизонтальной поверхности);
-
кратковременный (с максимальной нагрузкой при передвижении на подъем);
І) Тяговое усилие, развиваемое механизмом хода, равно:
а) при движении по горизонтальной поверхности:
![]() ,
Н
(1)
,
Н
(1)
б) при движении на подъем:
![]() ,
Н (2)
,
Н (2)
где
![]() -
внутреннее
сопротивление ходового механизма,
Н
-
внутреннее
сопротивление ходового механизма,
Н
![]() =(0,048÷0,091)
=(0,048÷0,091)![]() ,
Н (3)
,
Н (3)
![]() -
сопротивление
перекатыванию
тележки, Н
-
сопротивление
перекатыванию
тележки, Н
![]() ,
Н
(4)
,
Н
(4)
![]() -
сопротивление инерции при трогании с
места, Н
-
сопротивление инерции при трогании с
места, Н
![]() ,
Н (5)
,
Н (5)
![]() -
сопротивление подъему, Н
-
сопротивление подъему, Н
![]() ,
(6)
,
(6)
![]() -
вес экскаватора, равный :
-
вес экскаватора, равный :
![]() ,
Н
,
Н
![]() -
максимальная величина допустимого угла
подъема,
-
максимальная величина допустимого угла
подъема,
![]() =12
=12![]() .
.
Меньшее значение коэффициентов сопротивлений относится к экскаваторам средней и большой мощности.
Для экскаваторов большой мощности кроме перечисленных сопротивлений учитывается и сопротивление, вызванное ветровой нагрузкой, равное:
![]() ,Н
(7)
,Н
(7)
где
![]() - аэродинамический коэффициент обтекания
конструкции,
- аэродинамический коэффициент обтекания
конструкции,
![]() =0,3÷0,6
=0,3÷0,6
![]() =
нормальный скоростной напор, применяемый
равным
=
нормальный скоростной напор, применяемый
равным
![]() =
245Па
=
245Па
![]() -
площадь поверхности экскаватора на
которую действует ветровая нагрузка.
-
площадь поверхности экскаватора на
которую действует ветровая нагрузка.
-
Мощность, потребляемая двигателями хода равна:
а) при движении по горизонтальной поверхности:
![]() ,
кВт (8)
,
кВт (8)
б) при движении на подъем:
![]() ,
кВт
,
кВт
где
![]() -
скорость передвижения экскаватора по
горизонтальной поверхности, м/с;
-
скорость передвижения экскаватора по
горизонтальной поверхности, м/с;
![]() -
скорость движения экскаватора на подъем,
м/с,
-
скорость движения экскаватора на подъем,
м/с,
![]() =(0,85÷0,9)
=(0,85÷0,9)
![]() ;
;
![]() -
к.п.д. механизма гусеничного хода для
расчетов принимается
-
к.п.д. механизма гусеничного хода для
расчетов принимается
![]() =0,6;
=0,6;
-
Мощность одного двигателя механизма хода:
![]() (9)
(9)
где
![]() -
количество двигателей механизма хода
(табл. 9).
-
количество двигателей механизма хода
(табл. 9).
Окончательно тип двигателя и его мощность принять по Н.Н. Чулкову. Расчет приводов карьерных машин. М. “Недра”, 1987.
Таблица 9
|
Карьерные лопаты |
Вскрышные лопаты |
||||||
|
Емкость ковша |
i |
n |
n |
Емкость ковша |
i |
n |
n |
|
3,2 и 5 4,6 6,3 и 8 10 и 12,5 |
445 442 716 246 |
2 2 2 4 |
2 1 2 2 |
4 и 6 15 35 |
716 880 616 |
2 8 8
|
2 4 4
|
-
Длина гусеницы:
![]() ,
м (11)
,
м (11)
-
Ширина гусеницы:
![]() ,
м (12)
,
м (12)
где
![]() -
коэффициент линейного размера
-
коэффициент линейного размера
-
Удельное давление гусеницы на грунт
![]() ,
Па (13)
,
Па (13)
где
![]() -
количество гусениц хода (табл. 9).
-
количество гусениц хода (табл. 9).
Допустимое значение РРнгирошрР Р:
-
болото Р= 0,04-0,06 МПа;
-
мокрая глина Р= 0,2- 0,4 МПа;
-
сухая глина Р= 1,1-1,5 МПа;
-
Диаметр ведущего колеса хода:
![]() ,
м (14)
,
м (14)
-
Частота вращения ведущего колеса хода:
![]() ,
об/мин
(15)
,
об/мин
(15)
-
Частота вращения вала двигателя механизма хода:
![]() ,
мин
,
мин![]() (16)
(16)
i - передаточное число редуктора (табл.9.);
10) Коэффициент механической перегрузки двигателя:
![]() ,
(17)
,
(17)
11) Допустимое время перегрузки :
 ,
мин (18)
,
мин (18)