

7.3. Матрична форма запису системи лінійних рівнянь
Для системи m лінійних рівнянь з п невідомими

вводяться наступні позначення:
А=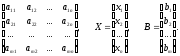
Тоді
система лінійних рівнянь запишеться у
вигляді матричного рівняння АХ=В.
Цю форму запису системи лінійних рівнянь
називають матричною
формою. Нехай
кількість рівнянь m
у системі дорівнює кількості невідомих
п,
причому визначник |А| цієї системи
відмінний від нуля. Якщо записане
матричне рівняння має розв’язок Х*= тобто виконується рівність АХ*=В,
то, помноживши зліва обидві частини
рівності на А-1,
матимемо А-1АХ*=А-1В,
звідки Х*=А-1В,
тобто отримаємо матричний вигляд
розв’язку заданої системи лінійних
рівнянь.
тобто виконується рівність АХ*=В,
то, помноживши зліва обидві частини
рівності на А-1,
матимемо А-1АХ*=А-1В,
звідки Х*=А-1В,
тобто отримаємо матричний вигляд
розв’язку заданої системи лінійних
рівнянь.
Отже, якщо вихідне матричне рівняння із невиродженою матрицею А має розв’язок, то він єдиний і задається формулою
Х*=А-1В.
Приклад
Розв’язати
систему лінійних рівнянь матричним
способом

А
 А-1
А-1

Х*=А-1В=

Отже, розв’язок (3;9;2).
Лекція 8. Векторні простори
8.1. Поняття векторного простору, його розмірність і базис
а) Означення
Множина V елементів x, y, z, … називається лінійним, або векторним, простором, якщо сума х+у довільних двох її елементів х, у і добуток αх кожного її елемента х на будь-яке число α теж належать множині V, причому виконуються наступні умови:


 θ
називають нульовим елементом простору.
θ
називають нульовим елементом простору. –х
називають елементом, протилежним до
х.
–х
називають елементом, протилежним до
х. 1·х=х.
1·х=х.


Елементи векторного простору називають векторами.
Приклади векторних просторів
Множина розв’язків системи лінійних однорідних рівнянь.
Множина всеможливих рядків чи стовпчиків, які містять п дійсних чисел.
Множина поліномів не вище п-го степеня з дійсними коефіцієнтами.
Якщо в просторі V визначено множення його елементів на дійсні (комплексні) числа, то V називають дійсним (комплексним) векторним простором.
Із означення векторного простору випливають наступні властивості.
Єдиність нуля.
Якщо припустити існування двох нульових елементів θ1 і θ2, то із θ1+ θ2= θ1 та θ2+ θ1= θ2 і того, що θ1+ θ2= θ2+ θ1, випливає θ1= θ2.
Єдиність протилежного елемента.
Якщо припустити існування двох протилежних до х елементів y та z, таких, що х+у=θ і х+z=θ, то із
y+x+z=y+(x+z)=y+θ =y та
y+x+z=(y+x)+z=θ+z=z
випливає y=z.
 0∙х=θ.
0∙х=θ.
Дійсно, 0∙х=(0+0)∙х=0∙х+0∙х. Додавши до обох частин рівності -0∙х отримаємо θ=0∙х.

Дійсно,
 Додавши до обох частин рівності
Додавши до обох частин рівності отримаємо
отримаємо
Якщо добуток αх=θ, то або α=0, або х=θ.
Дійсно,
якщо
 то
то
 є
протилежним до х.
є
протилежним до х.
Дійсно, х+(-1)х=1·х+(-1)х=[1+(-1)]x=0·x=θ, звідки (-1)х= -х.
б) Розмірність і базис
Вектори
а1,
а2,
…,
аk
векторного простору V
називаються лінійно
залежними,
якщо існують такі числа
 одночасно не рівні нулю, що
одночасно не рівні нулю, що

В іншому випадку вектори називають лінійно незалежними.
Якщо
вектори а1,а2,…,аk
лінійно залежні, тобто
 ,
і, наприклад,
,
і, наприклад, то
то

тобто
 де
де

Це означає, що вектор аk є лінійною комбінацією решти векторів системи. Отже, якщо вектори а1, а2,…,аk лінійно залежні, то, принаймні, один із них лінійно виражається через решту. Ясно, що справедливе і зворотнє твердження.
Максимальна кількість лінійно незалежних векторів системи векторів а1, а2, …, аk називається рангом цієї системи. Позначають rank {а1, а2, …, аk}.
Довільна
матриця А= містить дві системи векторів:
містить дві системи векторів:
систему
векторів-рядків
 і систему векторів-стовпчиків
і систему векторів-стовпчиків ,
,
де
 ,
і=1,
2,
…,
m,
,
і=1,
2,
…,
m,
 ,j=1,
2,
…,
n.
,j=1,
2,
…,
n.
Ранг системи рядків довільної матриці А дорівнює рангу її стовпчиків і називається рангом матриці А. Позначається rank А або r(A).
Таким чином, для знаходження рангу матриці досить з допомогою елементарних перетворень над рядками (стовпчиками) звести її до східчастого вигляду і підрахувати кількість ненульових рядків (стовпчиків), яка й дорівнюватиме кількості лінійно незалежних серед них, а, отже, рангу матриці.
Приклад
Знайти ранг матриці
А= .
.
Зведемо
матрицю А до східчастого вигляду з
допомогою елементарних перетворень її
рядків: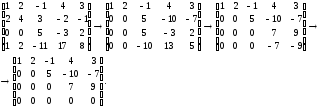
Отже, r(A)=3.
Розмірністю векторного простору V називається максимальна кількість лінійно незалежних векторів, що містяться в ньому. Позначається dimV (від dimage – фр).
Приклади
Розмірність множини всіх векторів площини дорівнює два.
Розмірність множини просторових векторів – три.
Простори із скінченною розмірністю називаються скінченновимірними.
Базисом простору V називають впорядковану скінченну систему векторів, якщо:
вона лінійно незалежна;
кожний вектор простору V є лінійною комбінацією векторів цієї системи.
Коефіцієнти заданої лінійної комбінації називаються компонентами або координатами вектора за цим базисом.
Компоненти вектора у вибраному базисі визначаються однозначно.
Дійсно,
при двох заданнях вектора х
в базисі а1,
а2,
…,
аk,
зокрема,
 та
та ,
отримаємо
,
отримаємо .
Оскільки система а1,
а2,
…,
аk
лінійно незалежна, то всі коефіцієнти
.
Оскільки система а1,
а2,
…,
аk
лінійно незалежна, то всі коефіцієнти
 ,
звідки
,
звідки
В п-вимірному просторі кожна впорядкована лінійно незалежна система із п лінійно незалежних векторів є базисом. Ясно, що в п-вимірному просторі кожну впорядковану лінійно незалежну систему із k<n векторів можна доповнити до базису.
Розглянемо
в просторі V
два базиси: е=(е1,е2,…,еп)
та е' (перший з них назвемо старим, а другий
– новим). Виразимо кожний вектор нового
базису через вектори старого базису:
(перший з них назвемо старим, а другий
– новим). Виразимо кожний вектор нового
базису через вектори старого базису:

Можна сказати, що нові базисні вектори виражаються через старі з допомогою матриці
А
стовпчиками
якої є коефіцієнти їх розкладу за
векторами старого базису. Матриця А
називається матрицею
переходу
від базису е
до базису
е'.
Матриця переходу є невиродженою, оскільки
в іншому випадку її стовпчики, а, отже,
і вектори
 ,
були б лінійно залежними.
,
були б лінійно залежними.
Розглянемо зв’язок між координатами одного і того ж вектора в старому і новому базисах.
Нехай
х=х1е1+х2е2+…+хпеп
і

Підставивши
замість
 їх вирази черезе1,
е2,
…,
еп,
отримаємо
їх вирази черезе1,
е2,
…,
еп,
отримаємо

Із єдиності розкладу вектора х за базисом е1, е2, …, еп, випливає
 звідки
звідки
 .
.
Таким чином, старі координати вектора отримуються із нових з допомогою тієї ж матриці А, тільки коефіцієнти відповідних розкладів утворюють рядки цієї матриці.
Приклад
Нехай
е1,
е2
– одиничні вектори, розташовані вздовж
осей прямокутної декартової системи
координат. Повернемо осі координат на
кут φ
проти годинникової стрілки і позначимо
нові базисні вектори через
 та
та .
Кути, утворені вектором
.
Кути, утворені вектором з векторамие1
і е2,
рівні відповідно φ
і
з векторамие1
і е2,
рівні відповідно φ
і
 (малюнок).
Тому координати цього вектора в базисі
е1,
е2
рівні
(малюнок).
Тому координати цього вектора в базисі
е1,
е2
рівні
 і
і значить,
значить, .
Аналогічно, кути вектора
.
Аналогічно, кути вектора з векторамие1
і
е2
рівні відповідно
з векторамие1
і
е2
рівні відповідно
 іφ,
тому координати його в базисі е1,
е2
рівні
іφ,
тому координати його в базисі е1,
е2
рівні
 і
і ,
значить,
,
значить,



 e2
e2

φ φ
e1






Таким
чином, матриця переходу від базису е1,
е2
до базису
 ,
, матиме вигляд
матиме вигляд
А=
Тоді старі координати виражаються через нові так:

звідки
