

Прикладна механіка_ЛЕКЦІЇ
.pdfКАБІНЕТ МІНІСТРІВ УКРАЇНИ НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ БІОРЕСУРСІВ І ПРИРОДОКОРИСТУВАННЯ УКРАЇНИ
В.М. Булгаков, О.М. Черниш, Д.Г. Войтюк
ТЕХНІЧНА
МЕХАНІКА
Схвалено Міністерством аграрної політики України як навчальний посібник для підготовки бакалаврів напрямів 6.100102 «Процеси, машини та обладнання агропромислового виробництва», 6.090103 «Лісове і садово-паркове господарство» у вищих навчальних закладах III – IV рівнів акредитації
MILANIK
Ніжин 2011
ББК 22.21я 73 |
Затверджено як навчальний посібник |
Т33 |
Департаментом аграрної освіти, науки |
|
та дорадництва Міністерства аграрної |
|
політики України |
|
(лист № 18-128- 13/2040 від 24.12.08 р.) |
Рецензенти:
акад. НААНУ, доктор технічних наук, професор Я.С. Гуков
(Національний науковий центр “ІМЕСГ” НААНУ),
доктор фіз.-мат. наук, професор Ю.Б. Гнучій
(Національний університет біоресурсів і природокористування України).
доктор технічних наук, професор С.Ф. Пилипака
(Національний університет біоресурсів і природокористування України)
Булгаков В.М., Черниш О.М., Войтюк Д.Г.
Технічна механіка. Навчальний посібник. – Ніжин: «MILANIK», 2011. – 600 с.
Навчальний посібник містить шість основних складових частин технічної механіки – статику, кінематику, динаміку, а також теорію механізмів і машин, опір матеріалів, деталі машин.
Разом із теоретичними основами надаються приклади розв'язання задач стосовно практичних питань механізації аграрного виробництва і лісотехнічних та садово-паркових робіт. Для ґрунтовного засвоєння матеріалу в кінці кожного розділу наведені запитання для самоконтролю.
Навчальний посібник призначений для фахівців ОКР «Бакалавр» напрямів 6.100102 «Процеси, машини та обладнання агропромислового виробництва», 6.090103 «Лісове і садово-паркове господарство» вищих навчальних закладів освіти III – IV рівнів акредитації Міністерства аграрної політики України.
ISBN 978-966-96794-5-1
©Булгаков В.М., Черниш О.М Войтюк Д.Г., 2011
©Національний університет біоресурсів і природокористування України, 2011
ПЕРЕДМОВА
Технічна механіка містить в собі такі фундаментальні загальнотехнічні дисципліни як теоретична механіка (розділи статика,
кінематика, динаміка), теорія механізмів і машин, опір матеріалів, деталі машин.
Зміст навчального посібника відповідає програмі підготовки фахівців ОКР «Бакалавр» напрямів 6.100102 «Процеси, машини та обладнання агропромислового виробництва», 6.090103 «Лісове і садово-
паркове господарство» вищих навчальних закладів освіти III – IV рівнів акредитації Міністерства аграрної політики України.
Частина наданого матеріалу призначена для самостійного опрацювання. В кінці кожного розділу наведені запитання для самоперевірки і закріплення знань.
Навчальний посібник з технічної механіки може бути також використаний студентами та викладачами інших вищих навчальних закладів технічного напрямку.

4
ВСТУП
Сучасні вимоги до виробництва і технологій потребують високої кваліфікації майбутнього спеціаліста як з фахових, так і з загальнотехнічних дисциплін. Це закладає загальну базу технічної грамотності і ерудованості. При цьому необхідно вміти самостійно розв’язувати задачі, що пов’язані з використанням передового досвіду експлуатації технічних засобів, новітніх технологій, бути оперативним і чітко орієнтуватися у загальних технічних проблемах сьогодення.
Технічна механіка, як комплекс фундаментальних загальнотехнічних дисциплін, є теоретичною і науковою основою вивчення і розвитку сучасної техніки. Користуючись її законами і принципами, можуть бути розроблені і досліджені споруди, конструкції, машини та обладнання.
Тому основною задачею вивчення технічної механіки є підготовка кваліфікованих фахівців, які здатні забезпечити розв’язання багатьох інженерних задач раціонального використання технічних засобів агропромислового виробництва, створення і вдосконалення нової конкурентоспроможної техніки відповідно до конкретних умов її роботи.
Технічна механіка як фундаментальна загальнотехнічна дисципліна включає в себе наступні основні частини, які тісно взаємопов’язані між собою:
-теоретична механіка,
-теорія механізмів та машин,
-опір материалів,
-деталі машин.
В теоретичній механіці вивчаються найбільш загальні закономірності рівноваги і механічного руху матеріальних об’єктів.

5
Предметом дослідження теоретичної механіки є матеріальні об’єкти
(тіла) у вигляді найпростіших моделей, які розглядаються у зв’язку зі зміною їхнього взаємного розташування. Тобто під механічним рухом матеріальних об’єктів розуміють зміну їх положення у просторі протягом часу. Цей видимий зовнішній рух на відміну від "прихованих" внутрішніх атомно-молекулярних рухів і називається механічним рухом.
Теоретична механіка є однією з фундаментальних загальнонаукових дисциплін фізико-математичного циклу і є, фактично, науковою базою всіх галузей сучасної, зокрема, сільськогосподарської техніки.
В свою чергу теоретична механіка традиційно ділиться на статику,
кінематику і динаміку.
При цьому в статиці розглядаються властивості сил, способи перетворення систем сил і умови рівноваги тіл під дією систем сил, в
кінематиці розглядається рух тіл із геометричної точки зору без урахування їх мас і діючих сил, в динаміці, яка є найбільшим і узагальненим розділом теоретичної механіки, розглядається рух матеріальних тіл під дією прикладених до них сил.
Втеорії механізмів і машин вивчається структура механізмів і машин на основі їх аналізу та синтезу.
Вопорі матеріалів вивчаються основи розрахунків деталей і елементів конструкцій на міцність, жорсткість і стійкість.
Вдеталях машин на основі знань і навиків, що набуті в попередніх розділах, вивчають принципи розрахунків при проектуванні та конструюванні деталей як загального, так і спеціального призначення із врахуванням умов їх експлуатації.

6
ТЕОРЕТИЧНА МЕХАНІКА
ЧАСТИНА I. СТАТИКА
РОЗДІЛ 1
ВИЗНАЧЕННЯ. ПЛОСКА СИСТЕМА ЗБІЖНИХ СИЛ
§ 1.1. Предмет статики. Основні поняття і визначення
Статика є розділом теоретичної механіки, що вивчає властивості сил і умови рівноваги тіл під дією цих сил.
В теоретичній механіці розглядають не реально існуючі тіла, а
наділені ідеальними властивостями їх абстрактні моделі.
Матеріальна точка – це тіло певної маси, розмірами та формою якого можна нехтувати в умовах даної задачі.
Система матеріальних точок (матеріальна система) – це сукупність точок, положення і рух яких взаємопов'язані і взаємообумовлені.
Абсолютно тверде тіло – це тіло, в якому відстані між двома довільними точками не змінюються з часом, простіше, це тіло, яке не деформується під дією сил.
В природі не існує тіл, які повністю відповідають цим поняттям.
Матеріальна точка, система матеріальних точок та тверде тіло є розрахунковими моделями при розв’язанні поставлених технічних задач не тільки статики, але і інших розділів теоретичної механіки.
Розглянемо поняття сили і системи сил, що діють на матеріальні тіла.
Тіла в природі різним чином взаємодіють між собою або з оточуючим їх середовищем. Механічна взаємодія тіл, тобто взаємодія, що
7
впливає на їх стан спокою або руху (механічний стан), характеризуються силами.
Сила – це кількісна міра механічної взаємодії двох тіл, яка визначає характер, величину та напрямок взаємодії.
Визначення сили характеризує її як векторну величину, що має три визначальних параметри: величину сили (числове значення), напрямок дії та точку прикладання. Числове значення сили називається модулем вектора сили. Напрямок сили – це напрямок того руху, що отримає тіло або матеріальна точка під дією цієї сили. Пряма лінія, по якій направлений вектор сили, називається лінією дії сили.
Графічно силу зображують у вигляді вектора довільної довжини
(крім випадків графічної статики, коли силу креслять у масштабі).
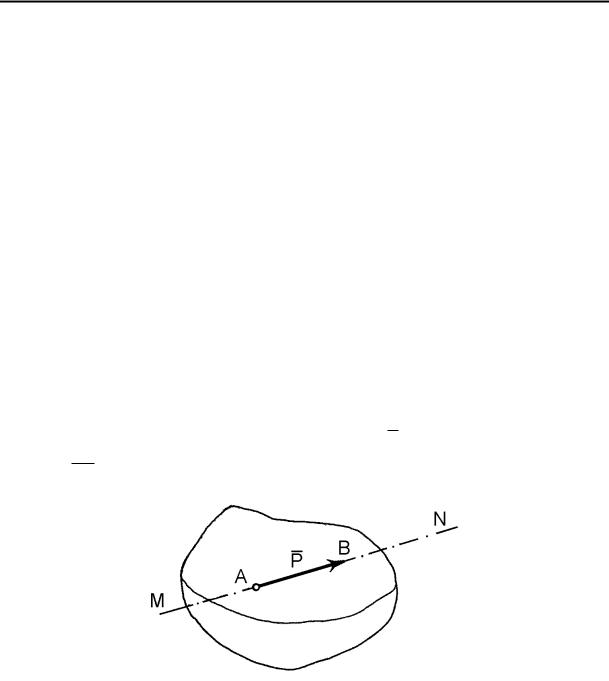
Наприклад, на рис. 1.1 показана довільна сила Р , яка зображена у вигляді вектора АВ , що прикладений у точці А і діє вздовж лінії дії сили MN .
Рис. 1.1
У Міжнародній системі одиниць вимірювання (СІ) одиницею вимірювання сили є один ньютон – [1 Н ] або один кілоньютон [1 кН ].
Причому 1 кH 1000 H . У технічній системі (МКГСС) одиницею вимірювання сили є один кілограм–сили – [ кГ ] або [кгс], у системі (СГС)
– одна дина [дин].

8
На тіло можуть одночасно діяти декілька сил, утворюючи систему.
Система сил – це сукупність декількох сил, які одночасно діють на тіло або на механічну систему.
Сили, лінії дії яких знаходяться в одній площині, утворюють плоску
систему сил. Якщо лінії дії сил знаходяться в різних площинах, маємо
просторову систему сил. Система з лініями дії сил, що перетинаються в одній точці називається збіжною системою сил, а з паралельно розташованими лініями дії – паралельною системою сил. Система сил може мати одночасно декілька ознак. Наприклад, існує плоска система збіжних сил і т.п.
Крім того, для перетворення систем сил з метою їх спрощення і аналізу застосовують наступні поняття:
еквівалентні системи сил – це такі системи сил, які на одне і теж тіло діють однаково;
рівнодійна сила системи сил – це така сила, дія якої еквівалентна дії заданої системи сил;
зрівноважувальна сила – це сила, яка за величиною дорівнює рівнодійній силі, розташована з нею на одній прямій, але протилежна за напрямом.
Таким чином, задачі статики полягають у:
-визначенні методів перетворення систем сил з метою спрощення і заміни їх найменшою кількістю силових факторів;
-визначенні умов рівноваги тіл під дією різних систем сил як на площині, так і у просторі;
Під рівновагою тіла розуміють такий механічний стан, при якому інші тіла,
що діють на це тіло, не змінюють цього стану. Основними випадками, при яких можлива рівновага тіла, є його рівномірний прямолінійний рух,
рівномірний обертальний рух та стан відносного спокою.
9
§1.2. Аксіоми статики
Воснову статики покладені аксіоми – положення, які базуються на основі досвіду практичних знань і приймаються без доведення.
І аксіома. визначає врівноважену сисиему сил.
Система сил, що прикладена до матеріальної точки, буде
врівноваженою, якщо під її дією цієї системи точка знаходиться у стані відносного спокою або рухається рівномірно і прямолінійно.
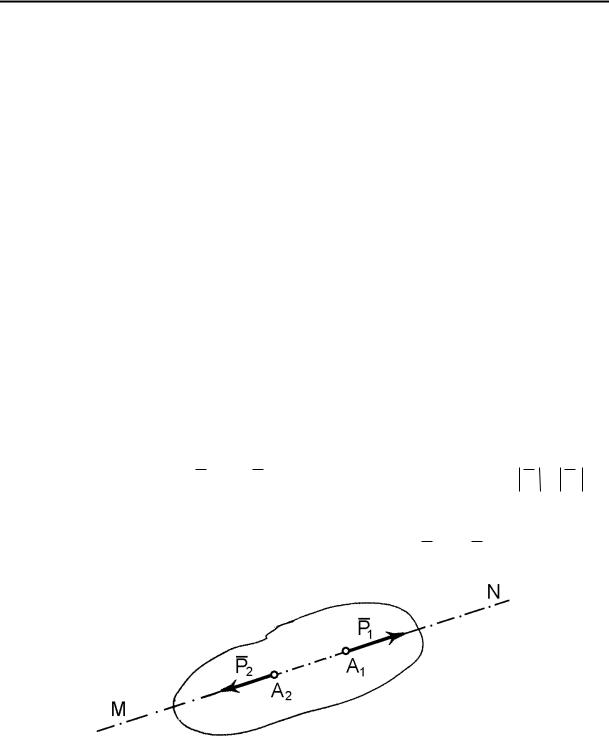
ІІ аксіома встановлює умову рівноваги двох сил.
Дві сили, які прикладені до абсолютно твердого тіла, будуть
взаємно врівноваженими, якщо вони однакові за модулем і діють по одній прямій у протилежних напрямках.
На рис. 1.2 показане довільне тіло, яке перебуває у стані рівноваги
під дією двох сил |
Р1 |
і |
Р2 |
з однаковими |
модулями |
Р1 Р2 |
і |
розташованими на одній прямій |
MN в протилежних напрямках. Точки |
||||||
прикладання сил можуть співпадати. Таким чином, |
Р1 Р2 . |
|
|
||||
Рис. 1.2
ІІІ аксіома є основою для перетворення систем сил.
Стан рівноваги тіла не порушиться, якщо до тіла приєднати або відкинути зрівноважену систему сил.

10
Наприклад, система зрівноважених сил ( Р1 , Р2 ) показана на рис. 1.2.
Ця аксіома носить назву аксіоми виключення сил.
Наслідок з II–ї і III–ї аксіом. Точку прикладання сили можна пересувати в межах даного тіла вздовж лінії дії сили (сила є ковзним вектором).
|
|
|
|
Рис. 1.3 |
|
|
|
||||
|
|
Наприклад, прикладемо до тіла (рис. 1.3) |
на лінії MN |
в точці |
А |
||||||
вектор сили Р1 , а в довільній точці B - сили P2 |
і P3 , такі, що |
P2 = Р1 , а |
|||||||||
|
|
|
|
|
|
|
|
|
|||
|
P3 = |
Р1 . Згідно другої аксіоми сили P2 і P3 зрівноважені, а згідно третьої |
|||||||||
аксіоми їх можна приєднати, не змінюючи кінематичного стану тіла. |
|
||||||||||
|
|
Але цю систему трьох сил можна розглядати по іншому: як силу |
P2 , |
||||||||
яка дорівнює силі Р1 і перенесена з точки А в точку B , і зрівноважену систему двох сил ( Р1 і P3 ), яку можна відкинути.
ІV аксіома визначає правило складання двох непаралельних сил.
Рівнодійна двох непаралельних сил, що прикладені до тіла в одній точці, є діагоналлю паралелограма, який побудований на цих силах, як на
сторонах, і прикладена в точці їх перетину. |
|
||
|
|
Ця аксіома носить назву закону паралелограма сил. |
|
|
|
Припустимо, що до тіла (рис. 1.4) в точці А прикладені дві сили |
Р1 |
та |
|
|
|
Р2 , які розташовані під кутом . Побудуємо на цих силах, як |
на |
||