

Прикладна механіка_ЛЕКЦІЇ
.pdf31
З цих положень випливають основні властивості (умови
еквівалентності) пар сил:
–не змінюючи дії пари сил на тіло, пару сил можна повертати та переносити, як завгодно, в площині її дії;
–дія пари на тіло не змінюється, якщо складові сили і плече пари змінювати, але так, щоб момент пари і площина дії залишалися незмінними;
–коли на тіло діє система пар сил, то пари і моменти пар можна додавати. Якщо всі пари даної системи пар розташовані в одній площині,
то момент результуючої пари
складових пар
M
дорівнює алгебраїчної сумі моментів
n |
|
mk . |
(1.23) |
k 1 |
|
§ 2.4. Умови рівноваги тіла під дією системи пар сил,
що розташовані в одній площині
Якщо на тіло діє система пар сил з моментами m1, m2 , ..., mn і момент результуючої пари M , як вже відомо, буде дорівнювати алгебраїчній сумі моментів складових пар, то для рівноваги тіла необхідно і достатньо, щоб момент результуючої пари дорівнював нулю. В такому разі і алгебраїчна сума моментів складових пар теж повинна дорівнювати нулю. Аналітично це буде мати такий вигляд
|
n |
|
M |
|
k |
|
m |
|
|
k 1 |
|
0
.
(1.24)

32
§ 2.5. Момент сили відносно центра (точки).
Алгебраїчна величина моменту
Якщо тіло закріпити в точці О |
|
|
|
|
і прикласти до нього силу P , лінія |
||||
дії якої не проходить через точку |
О , |
то тіло буде обертатись навколо цієї |
||
точки. |
|
|
|
|
Обертальний ефект сили характеризується її моментом відносно
центра (точки).
Моментом сили відносно центра (точки) називається взятий з відповідним знаком добуток величини сили на плече. Плече сили відносно центра – це найкоротша відстань (перпендикуляр) між даним центром і
лінією дії сили.
Момент вважається додатнім, якщо сила намагається повернути тіло відносно даної точки проти годинникової стрілки і від'ємним, якщо - за
годинниковою стрілкою. |
|
Момент сили P відносно точки O |
позначається як mo P . |
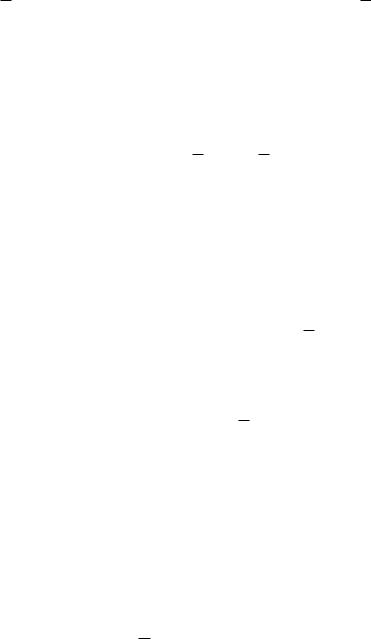
Розглянемо довільне тіло (рис. 1.15), яке може повертатися навколо
точки О (точніше навколо осі, яка перпендикулярна площині рисунка і проходить через точку О ). Прикладемо в інших точках тіла A , B , C
вектори сил |
P |
P |
P |
|
|
|
|
|||||
1 , |
2 , |
3 і визначимо їх обертальний ефект навколо точки О . |
||||||||||
Як бачимо з рисунка, сила P , яка прикладена у точці A , може |
||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
повернути тіло навколо точки |
О проти ходу стрілки годинника. Сила |
P2 - |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
за ходом стрілки |
годинника. |
Проте сила |
P3 не може повертати |
тіло |
||||||||
навколо точки О , |
оскільки лінія дії сили P3 |
перетинає дану точку. Таким |
||||||||||
|
|
|
|
|
|
|
|
|||||
чином сили |
P і |
P |
створюють обертальний ефект (момент) відносно точки |
|||||||||
|
|
|
1 |
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||
О , а сила P3 |
- ні. |
|
|
|
|
|
||||||

33
Рис. 1.15
Покажемо на рис. 1.15 плечі сил, які створюють моменти відносно
точки О , і визначимо алгебраїчні |
величини моментів цих сил |
|
|||||||
|
|
|
|
|
P h , |
|
|||
m |
P |
(1.25) |
|||||||
o |
1 |
|
1 |
1 |
|
||||
mo |
|
|
P2 |
h2 , |
(1.26) |
||||
P2 |
|||||||||
mo |
|
|
P3 0 0 . |
|
|||||
P3 |
(1.27) |
||||||||
Таким чином, момент сили характеризується трьома параметрами:
модулем, площиною дії і напрямом повороту.
§ 2.6. Плоска система довільно розташованих у площині сил.
Теорема про паралельне перенесення сили
Якщо лінії дії сил, прикладених до тіла довільно розташовані в одній
площині, то така система сил є плоскою системою довільних сил.

34
Розглянемо теорему про паралельне перенесення сили, що прикладена до тіла, яку можна вважати лемою. Візьмемо довільне тіло, до
якого |
в точці A прикладена |
сила |
1 з лінією дії |
MN |
(рис. 1.16, а). |
|
|
|
|
|
P |
|
|
Виберемо на тілі другу точку |
B і проведемо крізь неї пряму, паралельну |
|||||
прямій |
MN |
. Прикладемо на цій прямій у точці B зрівноважену систему |
||||
сил P2 |
P3 |
, модулі усіх трьох сил виберемо однаковими, тобто |
||||
|
|
|
1 P2 |
P3 . |
|
(1.28) |
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
сили P і |
|
|
|
|
|
|
|
|
|
|
|||||||||
Тепер, як бачимо з рис. 1.16, б, |
|
P |
можна об'єднати у пару |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
3 |
|
|
|
|
|
|
|
|
|
|||
сил ( P P , |
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|||||
P |
// |
P |
) і її |
можна |
замінити |
|
моментом |
P |
,P |
пари. |
||||||||||||||||
1 |
3 |
1 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
3 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Величина моменту цієї пари буде дорівнювати моменту даної сили P |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
||
відносно точки В: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
m( |
|
, |
|
) P h m ( |
|
) . |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
P |
P |
P |
|
|
|
|
|
|
(1.29) |
||||||||||||
|
|
|
|
1 |
3 |
1 |
B |
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||

|
|
|
|
|
|
|
|
|
|
|
|
|
35 |
|
|
|
|
|
|
|
|||||||
|
Отже, остаточно маємо силу |
1 |
, яка перенесена паралельно в точку В |
||||||||||
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
P , |
P P ) і, |
|
|
|
|
|
|
|
|
|
||
(сила |
так |
звану, |
"приєднану" пару |
( P P ), момент |
якої |
||||||||
|
2 |
2 |
1 |
|
|
|
|
1, |
3 |
|
|||
дорівнює |
моменту |
сили |
1 , що |
переноситься, |
відносно точки |
B |
|||||||
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
(рис. 1.16, в).
Таким чином, теорему можна сформулювати так: при паралельному переносі сили в іншу точку рівновага тіла не зміниться,
якщо додати, так звану, “приєднану”, або компенсуючу пару, момент якої дорівнює моменту даної сили відносно точки, в яку переноситься сила.
§ 2.7. Зведення плоскої системи довільних сил до даного центру
|
Уявимо |
довільне тіло, що знаходиться під дією системи сил |
||
P |
P2 , |
P |
, ..., |
Pn , лінії дії яких розміщені у площині рисунку і розташовані |
1, |
3 |
|||
довільно (рис. 1.17, а). |
|
|
Виберемо на тілі довільну точку |
O |
як центр зведення. Перенесемо у |
центр зведення всі сили, які діють на тіло, паралельно самим собі (якщо лінія дії сили перетинає точку O , то ця сила просто переноситься по лінії
дії у центр зведення). |
|
|
|
P |
|
Розпочнемо з сили |
1 . |
Сила переноситься паралельно самій собі у |
точку O , але при цьому до тіла додається момент “приєднаної” пари сил, |
||
який дорівнює моменту сили |
P |
|
1 відносно точки O : |
||
m Ph |
m |
(P ) |
. |
|
1 |
1 1 |
o |
1 |
|
Тепер маємо силу P , яка прикладена до тіла у центрі зведення
1
приєднану до тіла пару сил з моментом m1 .
(1.30)
О , та

36
Рис. 1.17
Подібно вчинимо і з рештою сил |
P2 , |
P3 , |
переносяться паралельно самим собі у центр зведення тіла додаються “приєднані” пари сил
m2 P2h2 mo (P2 ) , m3 P3h3 mo (P3 ) ,
................................ , mn Pnhn mo (Pn ) .
..., O
Pn . Всі вони і при цьому до
(1.31)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
37 |
|
|
|
|
|
|
|
|
|
|
|
||||||
В результаті таких операцій до тіла в точці |
O |
прикладена плоска |
||||||||||||||
система |
збіжних сил |
|
|
|
|
|
|
|
|
|
|
і на тіло |
діє |
система пар сил з |
||
P , |
P , |
P , ..., |
P |
|||||||||||||
|
|
|
1 |
2 |
3 |
n |
|
|
|
|
||||||
моментами |
m1, m2 , |
m3 |
, , |
|
mn , |
|
величини |
яких |
визначаються |
|||||||
залежностями (1.30) і (1.31). |
|
|
|
|
|
|
|
|
|
|||||||
Систему збіжних сил у точці O |
можна замінити однією рівнодійною |
|||||||||||||||
силою |
R , |
яка називається |
головним |
вектором |
Ргл. |
плоскої системи |
||||||||||
довільних сил. Для цього необхідно геометрично додати систему збіжних
сил, прикладених у центрі зведення |
O , тобто побудувати силовий |
многокутник (рис. 1.17, б): |
|
|
|
|
n |
Р |
гл. |
|
P |
|
|
k |
|
|
|
|
k 1 |
.
(1.32)
Систему пар сил, яка тепер прикладена до тіла, також можна додати,
отримавши головний момент плоскої системи довільних сил, який дорівнює алгебраїчній сумі моментів складових пар:
n
M гл. mk k 1
|
n |
|
|
|
|
o |
k |
|
m |
P |
|
|
k 1 |
|
|
.
(1.33)
Таким чином, плоска система довільних сил може бути зведена до
двох силових факторів: однієї сили Ргл. |
– головного вектора системи, і |
|
однієї пари сил з моментом |
M гл. |
– головного моменту системи |
(рис. 1.17, в). |
|
|
Головний вектор системи дорівнює геометричній сумі векторів
складових сил, а головний момент системи дорівнює алгебраїчній сумі моментів усіх сил відносно центра зведення.
Головний вектор |
Ргл. |
і головний момент |
M гл. |
плоскої системи |
довільних сил мають деякі особливості.
38
Так, величина головного вектора Ргл. не залежить від положення центра зведення, а величина головного моменту M гл. залежить від зміни центра зведення. А якщо головний вектор Ргл. дорівнює нулю, то головний момент M гл. також буде незалежним від вибору центра зведення. Якщо ж головний момент M гл. дорівнює нулю, то головний вектор Ргл. буде рівнодійною плоскої системи сил.
Визначимо аналітично головний вектор та головний момент плоскої системи довільних сил.
Для головного вектора Ргл. спочатку визначимо його проекції на осі плоскої декартової системи координат:
Р
Р
|
|
n |
|
|
|
|
|
гл.x |
|
P |
, |
|
kx |
||
|
|
k 1 |
|
|
|
n |
|
|
|
|
|
|
|
P |
|
гл.y |
, |
||
|
ky |
||
|
|
k 1 |
|
(1.34)
де |
Pkx , Pky |
- проекції k –тої сили системи на відповідні осі координат. |
||
|
Модуль головного вектора |
Ргл. |
плоскої системи довільних |
|
дорівнює |
|
|
|
|
сил
Р |
|
Р |
2 |
Р |
2 |
. |
|
|
|
|
|
||
гл. |
|
гл.x |
гл.y |
|
||
(1.35)
Головний момент |
M |
алгебраїчним додаванням зведення O , а саме:
n
M гл. mk mo (
k 1
гл. |
плоскої системи довільних сил визначається |
|
моментів складових сил відносно центра |
n
P1 ) mo ( P2 ) ... mo ( Pn ) mo ( Pk ). (1.36)
k 1

39
§ 2.8. Деякі випадки зведення плоскої системи довільних сил до даного центру
Розглянемо окремі випадки, які можуть бути при зведенні плоскої
системи довільних сил до даного центру О А саме: |
|
|
|
||
1. |
Головний вектор Ргл. 0 |
, а головний момент |
M гл. 0 . У цьому |
||
випадку величина головного моменту M гл. не залежить від вибору центра |
|||||
зведення; |
|
|
|
|
|
|
Головний момент M гл. 0 , а головний вектор |
|
|||
2. |
Р |
гл. 0 . У даному |
|||
випадку головний вектор Ргл. є рівнодійною силою R системи сил. |
|||||
Покажемо, що в загальному випадку, коли відносно точки зведення |
|||||
О системи головний вектор Ргл. |
0 і головний момент M гл. |
0 , завжди |
|||
існує |
інша точка зведення |
системи, відносно |
|
якої |
головний |
момент M гл. 0 .
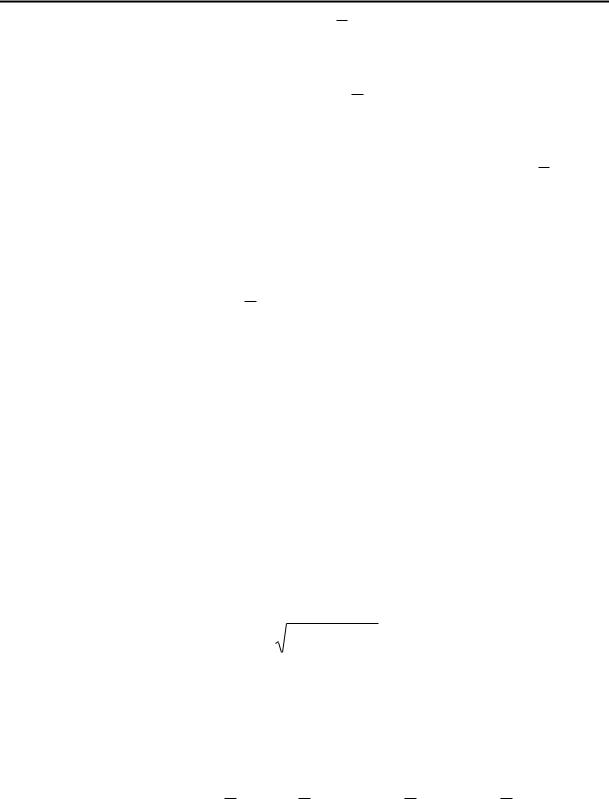
Рис. 1.18

40
Нехай головний вектор і головний момент плоскої системи
довільних сил зведені до точки |
О |
(рис.1.18). Зобразимо головний момент |
|||
парою сил |
|
,R , паралельних головному вектору |
Ргл. . Причому плече |
||
R |
|||||
пари сил виберемо так, щоб модулі цих сил дорівнювали модулю головного вектора:
|
|
|
|
|
|
h |
M |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
гл. |
. |
|
|
|
|
(1.37) |
||||
|
|
|
|
|
|
|
Р |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
гл. |
|
|
|
|
|
|
Так |
як в |
точці |
О |
сили |
R |
|
|
і Ргл. |
врівноважуються, їх |
можна |
|||||||
|
|
|
|||||||||||||||
відкинути. Тоді система зводиться до однієї рівнодійної |
R , що прикладена |
||||||||||||||||
в точці зведення |
С . Відповідно, |
відносно цієї точки С |
головний момент |
||||||||||||||
системи |
M гл. 0 |
. При |
|
цьому |
рівнодійна |
R |
системи |
дорівнює за |
|||||||||
величиною |
головному |
вектору |
|
|
|
системи, |
але |
має |
іншу |
точку |
|||||||
Ргл. |
|||||||||||||||||
прикладання (точка С ). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
§ 2.9. Теорема Варіньона про момент рівнодійної плоскої системи сил
Для плоскої системи сил, яка зводиться до однієї рівнодійної, буде
справедлива теорема про момент рівнодійної або теорема Варіньона.
Розглянемо плоску систему довільних сил (рис.1.18), що зведена до
рівнодійної R |
в точці С , але має головний вектор |
Р |
гл. і головний момент |
|||||||||
M гл. відносно точки О . |
|
|
|
|
|
|
|
|
|
|||
Момент |
рівнодійної такої системи відносно точки |
О |
буде |
|||||||||
|
|
|
|
,R , тобто головному моменту системи |
||||||||
дорівнювати моменту пари сил R |
||||||||||||
M гл. : |
|
|
|
|
|
|
|
|
|
|
|
|
|
mo |
|
m |
|
|
|
М гл. . |
|
|
|||
|
R |
R |
,R |
|
(1.38) |
|||||||