

Прикладна механіка_ЛЕКЦІЇ
.pdf11
сторонах, паралелограм і проведемо крізь точку рівнодійною R1,2 цих сил.
А
діагональ, яка і буде
Рис. 1.4
Таким чином, ІІІ аксіома статики дає можливість геометрично додати дві сили, що прикладені в одній точці
R1,2
P 1
P2
.
(1.1)
З курсу геометрії відомо, що діагональ паралелограма, тобто модуль рівнодійної, дорівнює
R |
|
|
P |
2 |
P |
2 |
2P P cos |
|
1,2 |
|
|
||||||
|
|
1 |
2 |
1 |
2 |
|||
.
(1.2)
V аксіома встановлює, що не існує односторонньої дії сили.
Два взаємодіючих тіла діють одне на одне з рівними за модулем, але протилежними за напрямком силами.
Ця аксіома носить назву закону дії та протидії.
Слід зауважити, що сили взаємодії ніколи не зрівноважуються, тому що вони прикладені до різних тіл.
§1.3. Вільне і невільне тіло. В'язі та їх реакції
Утеоретичній механіці тверді тіла і матеріальні системи поділяються на вільні та невільні.
Тіло вважається вільним, якщо воно має можливість рухатись у

12
просторі в будь – якому напрямку і невільним – якщо рух його у просторі чимось обмежується.
Тіла, або перешкоди, що обмежують рух даного тіла, називаються
в'язями. Вважається, що на невільне тіло накладені в'язі.
Механічна дія в'язі на дане тіло називається реакцєюї в'язі. У статиці
розглядаються найпростіші в'язі у формі різних твердих та гнучких тіл.
Розглянемо основні типи в'язей як розрахункові моделі. Кожна з цих
в'язей має свою назву, графічне зображення і свої реакції.
|
1. |
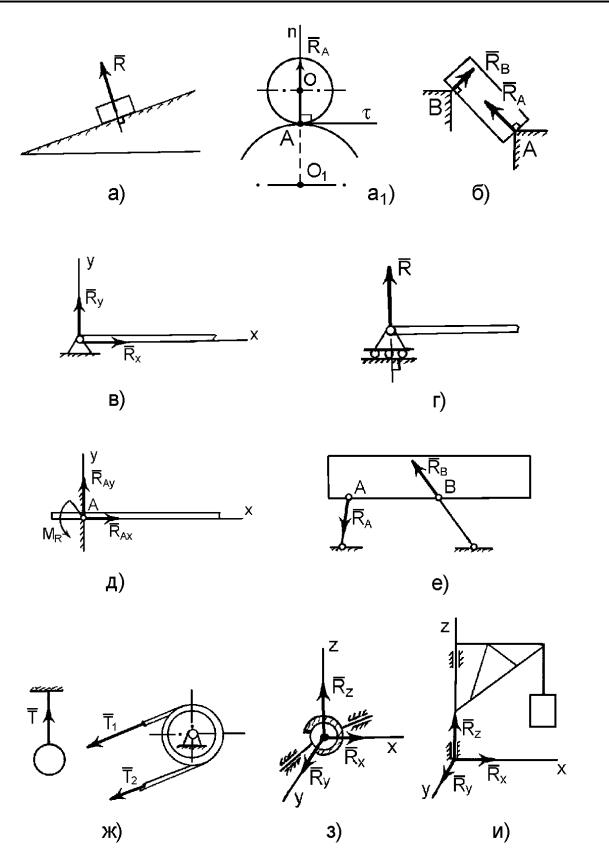
Ідеально гладенька поверхня або опора (рис. 1.5, а). Реакція цієї |
в'язі |
R |
спрямована перпендикулярно до поверхні або розташована вздовж |
нормалі. Гладенька площина накладає одну в'язь – неможливість рухатись по нормалі від поверхні, тому буде одна реакція, яка напрямлена проти напрямку втраченого переміщення за рахунок накладення в'язі.
Якщо поверхня є сферичною (рис. 1.5, а1), то реакція |
R A |
проходить |
крізь центри сфер О і О1 по нормалі п (перпендикулярно до дотичної ).
2. Точкова опора (рис. 1.5, б). Якщо |
|
гладенька |
площина |
вироджується у лінію або точку, то реакція в'язей |
RA |
і RB буде |
спрямована |
по перпендикуляру до лінії (поверхні) тіла, яке утримується в даній точці.
3. Шарнірно – нерухома опора або нерухомий шарнір (підшипник) (рис. 1.5, в). Реакція шарнірно – нерухомої опори прикладена у центрі шарніра і заздалегідь невідома за напрямком. Невідомий вектор реакції розкладається на дві складових вздовж осей координат Rx і Ry . З другого боку, ця опора накладає дві в'язі – неможливість вертикального і горизонтального переміщень, тому і буде дві відповідні складові реакції у площині, яка перпендикулярна до осі шарніра.
4. Шарнірно – рухома опора або коток (рис. 1.5, г). Реакція цієї в'язі
R спрямована перпендикулярно до площини, по якій рухається коток.
13
Рис. 1.5

14
5. Жорстке закріплення (рис. 1.5, д). Реакція цієї в'язі представлена складовими у вигляді сил RAx , і RAy та моменту реакції M R . Це відповідає кількості в'язей, які накладає ця опора: неможливість вертикального і
горизонтального лінійних переміщень та повороту у площині.
6. Ідеальний стержень, тобто невагомий тонкий стержень, на кінцях якого встановлені циліндричні, точкові шарніри і який працює тільки на розтяг або на стиск (рис. 1.5, е). Реакція цієї в'язі R спрямована вздовж
стержня і прикладена у центрі шарніра.
7. Гнучка нитка або в'язь, яка здійснюється ідеальними гнучкими тілами, тобто невагомими, нерозтяжними нитками: канатами, пасами,
ланцюгами (рис. 1.5, ж). Реакція цієї в'язі T напрямлена вздовж нитки і прикладена у точці закріплення А. У пасовій передачі натяги в її гілках T1 і
T2 також вважаються реакціями гнучких в'язей.
8. Сферичний шарнір або його частковий випадок – підп'ятник
(рис. 1.5, з, и). Реакція цієї в'язі зображена трьома складовими у вигляді
реакцій Rx , |
Ry , |
Rz , напрямлених вздовж осей просторової декартової |
системи координат |
x y z , з початком у центрі сферичного шарніра або |
|
підп'ятника.
У зв'язку з введенням поняття в'язей вводиться VI та VII аксіоми статики, які носять назви аксіоми про звільнення від в'язей та аксіоми про накладання нових в'язей.
VІ аксіома. Рівновага невільного матеріального тіла не порушиться якщо відкинути в'язі, що накладені на нього, а замість них прикласти сили,
які дорівнюють їх реакціям.
VІІ аксіома. Рівновага невільного матеріального тіла не порушиться якщо на нього накласти нові в'язі.

15
§ 1.4. Плоска система збіжних сил.
Визначення рівнодійної системи геометричним способом.
Якщо всі сили, що прикладені до тіла, розташовані в одній площині та лінії їх дії перетинаються в одній точці, то така система сил носить
назву плоскої системи збіжних сил.
Покажемо довільне тіло, до якого прикладена плоска система
збіжних сил |
1, P2 , P3 |
,... , Pn |
(рис. 1.6). При цьому лінії дії всіх сил |
|
P |
|
|
перетинаються в точці |
A . |
|
|
Рис. 1.6
Для визначення рівнодійної цієї системи необхідно додати всі вектори сил, що утворюють систему.
Геометричний спосіб додавання збіжних сил зводиться до побудови силового багатокутника. Він будується шляхом паралельного перенесення векторів сил у масштабі, коли початок наступної сили співпадає з кінцем

16
попередньої сили (рис.1.6). Тоді вектор рівнодійної з'єднує початок першої сили з кінцем останньої сили. Це можна записати так:
R P |
P |
1 |
2 |
або в скороченому вигляді:
n R Pk .
k 1
P3
... |
|
Pn
,
(1.3)
(1.4)
Тобто, рівнодійна плоскої системи збіжних сил дорівнює векторній сумі цих сил і є замикаючою стороною силового багатокутника,
побудованого на векторах сил цієї системи.
Величина рівнодійної сили не зміниться, якщо буде змінено порядок приєднання (додавання) сил до багатокутника, але конфігурація силового багатокутника буде іншою.
§1.5. Умова рівноваги плоскої системи збіжних сил
угеометричній формі
Якщо до вільного матеріального тіла прикладена одна сила певної величини, то про рівновагу цього тіла мови бути не може. Тобто, якщо розглядати плоску систему збіжних сил, яка зведена до рівнодійної, то тіло не може бути у рівновазі.
Тільки у випадку, коли рівнодійна системи дорівнює нулю (рис. 1.7),
ця система буде знаходитись у стані рівноваги.
Таким чином, для рівноваги тіла під дією плоскої системи збіжних сил необхідно і достатньо, щоб рівнодійна всіх сил дорівнювала нулю.
Ця умова виражається векторним рівнянням:
|
|
|
|
|
|
|
|
|
|
|
|
R |
P1 P2 P3 ... Pn 0 , |
(1.5) |
|||||||||
або скорочено:

17
|
n |
R |
k |
P |
|
|
k 1 |
0
.
(1.6)
Рівнодійна такої системи сил буде дорівнювати нулю, коли силовий багатокутник буде замкненим, тобто коли початок вектора першої сили буде співпадати з кінцем вектора останньої сили.
Рис. 1.7
Геометричну умову рівноваги можливо застосовувати при розв’язанні деяких задач статики графічним методом. При цьому:
1)вибирають тіло, рівновагу якого будуть розглядати;
2)відкидають в’язі, замінюючи їх реакціями;
3)користуючись умовою рівноваги, будують замкнений силовий багатокутник і визначають невідомі величини (у більшості випадків – це реакції в’язей).
Розв’язання задач на рівновагу за допомогою графічної побудови силових багатокутників має певні незручності, пов’язані з відкладанням векторів на площині і точністю отриманих результатів. Доцільніше при розв’язанні таких задач користуватись не геометричною, а аналітичною умовою рівноваги, яка базується на методі проекцій сил на осі координат.

18
§ 1.6. Проекція сили на осі координат
Проекцією сили на вісь – називається напрямлений відрізок на осі,
утворений між перпендикулярами, які опущені із початку і кінця вектора сили на цю вісь.
Правило знаків для проекції наступне:
якщо напрямок проекції сили на вісь співпадає з позитивним напрямком осі, то така проекція буде додатною, якщо ні – то від’ємною.
Розглянемо вектор сили
P
, що довільно розташований у площині
прямокутної декартової системи координат
Ox y
(рис. 1.8).
Проекціями сили
P
на осі координат
x
і
y
будуть відповідні
відрізки |
Px |
виразами:
і
Py , величину яких можна визначити за відомими із геометрії
Px P cos ,
(1.7)
Py P sin .
Рис. 1.8

19
За знаком ці проекції будуть додатні, коли кут напрямку вектора сили або лінії дії сили з віссю x ) гострий.
(кут перетину
Цілком зрозуміло, якщо цей кут дорівнює 90о , то проекції Px =0,
Py = P . Тобто, сила, яка направлена паралельно осі, проектується на цю
вісь в натуральну величину, а її проекція на перпендикулярну вісь дорівнює нулю.
Коли кут |
буде тупим, то практично зручніше знайти інший |
|
гострий кут перетину лінії дії сили з віссю |
x і визначати проекції за його |
|
допомогою та правила знаків. |
|
|
Таким чином, по величині та напрямку вектора сили |
P |
завжди |
можна визначити його проекції на осі координат.
Але справедливим буде і зворотне ствердження. По величині
проекцій |
P |
та P завжди можна визначити модуль вектора самої сили |
P , |
|
x |
y |
|
а також його напрямок.
Модуль сили P , як діагональ прямокутника, побудованого на його проекціях, визначається з наступного виразу:
P |
P |
2 |
P |
2 |
|
|
|
||
|
x |
y |
||
.
(1.8)
Кути між вектором сили допомогою напрямних косинусів:
P
та осями x та y визначаються за
^ |
P |
|
|
cos cos x, P |
x |
, |
|
P |
|||
|
|
||
^ |
P |
|
|
cos cos y, P |
y |
. |
|
P |
|||
|
|
(1.9)
Знаючи напрямні косинуси, через арккосинуси можна знайти і самі
кути.

20
§ 1.7. Визначення рівнодійної плоскої системи збіжних сил
аналітичним способом
|
|
Рис. 1.9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рівнодійна R |
плоскої системи збіжних сил |
P , |
P , |
P , |
P |
|||||||||
|
|
|
1 |
2 |
3 |
4 |
||||||||
дорівнює векторній сумі цих сил і є замикаючою стороною силового багатокутника, побудованого на векторах сил цієї системи (рис. 1.9).
Знайдемо проекцією рівнодійної |
сили |
R |
на вісь |
x . Для |
цього |
|||||
введемо на площині прямокутну декартову систему координат |
Ox y і |
|||||||||
спроектуємо на вісь |
x всі сили системи. Позначимо кінці векторів всіх сил |
|||||||||
літерами – А, |
В, |
С, |
D, |
K і проведемо |
перпендикуляри з |
кожної |
||||
точки на вісь |
x . Точки перетину перпендикулярів з віссю, |
які позначені |
||||||||
відповідними малими літерами – а, |
в, |
с, |
d, |
k , утворили на осі x |
||||||
напрямлені відрізки, які і є проекціями всіх сил на цю вісь. Кожна проекція, відповідно, дорівнює:
ab P |
; |
bc P |
; cd |
P |
|
; dk |
P |
. |
(1.10) |
||
1x |
|
|
2x |
|
3x |
|
|
4x |
|
|
|
Додамо алгебраїчно |
всі проекції |
і |
підрахуємо, |
чому |
ця сума |
||||||