

Прикладна механіка_ЛЕКЦІЇ
.pdf130
РОЗДІЛ 7
КІНЕМАТИКА ТВЕРДОГО ТІЛА.
НАЙПРОСТІШІ ВИДИ РУХУ
§7.1. Поступальний рух твердого тіла
Взадачах кінематики твердого тіла визначають як кінематичні параметри тіла в цілому, так і кінематичні параметри окремих його точок.
Найпростішими видами руху твердого тіла є поступальний і обертальний рухи.
Розглянемо спочатку поступальний рух.
Поступальним називається такий рух твердого тіла, при якому довільна пряма, що проведена в цьому тілі, під час руху залишається завжди паралельною самій собі.
Прикладами поступального руху твердого тіла може бути: рух шарнірного паралелограма O1 A BO2 (рис. 2.5, а), який здійснює коловий поступальний рух; поступальний рух штанги кулачкового механізму
(рис. 2.5, б), що здійснює зворотно-поступальний рух; рух педалі велосипеда відносно рами, поршня двигуна відносно циліндра, рух кузова автомобіля при прямолінійному русі і т.п.
Таким чином, траєкторією руху точок тіла при поступальному русі можуть бути як пряма лінія, так і будь-які криві. Термін “поступальний рух” стосується тільки тіла, а не точки.
При поступальному русі тіла всі його точки описують одинакові траєкторії і мають в кожну дану мить часу однакові за модулем і паралельно напрямлені швидкості та прискорення”.

131
Рис. 2.5
Розглянемо тіло, що рухається поступально і за деякій проміжок часу перейшло з одного положення в друге (рис. 2.6). Довільно проведена в тілі
пряма AB |
при цьому залишиться паралельною самій собі і займе нове |
|
положення |
|
rA , rB |
A B . Проведемо з довільної точки О радіуси – вектори |
||
точок тіла А і В. Із трикутника ОАВ, що утворено на рис. 2.6, маємо: |
|
|
|
rB rA rAB . |
(2.31) |
Згідно визначення поступального руху тіла вектор rAB , який з’єднує точки А і В і переміщується паралельно самому собі, є сталим вектором,
тому що точки А і В належать твердому тілу: |
|||||||
|
|
AB = |
AB = const. |
||||
r |
|||||||
Тобто, при поступальному |
русі тіла радіуси – вектори |
|
|
|
|
||
rA і rB |
|||||||
довільних точок А і В, змінюючись за напрямком, будуть відрізнятися згідно (2.31) на один і той же самий сталий вектор rAB .
Отже, траєкторію руху точки В можна одержати, змістивши траєкторію точки А у напрямку вектора rAB на відстань AB , і тому ці траєкторії будуть тотожними.

132
|
|
|
|
Рис. 2.6 |
|||||||||
Визначимо швидкості точок A і |
B тіла. Для цього диференціюємо за |
||||||||||||
часом вираз (2.31.): |
|
|
|
|
|
|
|
|
|
|
|||
|
d |
|
|
|
d |
|
|
|
|
d ( |
|
AB ) |
. |
rB |
rA |
|
r |
||||||||||
|
|
|
|
|
|
|
|
|
|||||
|
dt |
|
dt |
|
dt |
||||||||
Оскільки rAB = const, друга складова правої частини цього виразу буде дорівнювати нулю:
d (r |
) |
0 |
, |
AB |
|
||
|
|
|
|
dt |
|
|
|
і остаточно маємо:
d rB d rA , dt dt
а це є швидкості точок А і В:
|
|
|
|
|
|
|
B A . |
(2.32) |
|||

133
Таким чином, швидкості точок А і В тіла, що рухається поступально,
рівні за величиною і мають однаковий напрямок, оскільки вони розташовані на дотичних до однакових траєкторій руху і спрямовані в один і той же бік.
Визначимо прискорення точок А і В. Після другого диференціювання за часом виразу (2.31) маємо:
d |
2 |
r |
|
d |
2 |
r |
|
d |
2 |
r |
|
|
||
|
|
|
|
|
|
. |
||||||||
|
|
|
B |
|
|
|
A |
|
|
AB |
||||
|
|
|
|
|
|
|
|
|
|
|
||||
dt |
2 |
|
dt |
2 |
|
dt |
2 |
|
||||||
|
|
|
|
|
|
|||||||||
Як і у попередньому |
|
випадку |
|
маємо |
||||||||||
rAB = const. Тоді остаточно: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
2 |
(r |
) |
|
|
||||
|
|
|
AB |
|
|
dt |
2 |
|
|
|
|
|
||
0
,
оскільки
d |
2 |
r |
|
d |
2 |
r |
||
|
|
|
||||||
|
|
|
B |
|
|
|
A |
|
|
|
|
|
|
|
|
||
dt |
2 |
|
dt |
2 |
||||
|
|
|
||||||
або
d |
B |
|
d |
A |
, |
|
|
||||
|
|
|
|
||
dt |
|
dt |
|
||
і
aB aA .
,
(2.33)
Таким чином, поступальний рух тіла цілком визначається рухом будь-якої однієї його точки.
Остаточно можна зробити висновок, що визначення поступального руху твердого тіла зводиться до визначення руху тільки однієї його точки,
оскільки всі інші точки тіла рухаються ідентично. Внаслідок цього більшість задач з кінематики поступального руху тіла вирішується методами кінематики матеріальної точки.
134
§ 7.2. Обертальний рух твердого тіла навколо нерухомої осі.
Закон обертального руху
Обертальним рухом твердого тіла називається такий рух, при якому всі точки тіла рухаються по колах, центри яких лежать на одній прямій, яка називається віссю обертання.
Вісь обертання може знаходитись, як всередині самого тіла, так і бути зовні його.
Для здійснення обертального руху твердого тіла, необхідно закріпити нерухомо будь-які дві його точки, наприклад, у підшипниках,
тоді пряма, яка проходить крізь ці точки і буде віссю обертання.
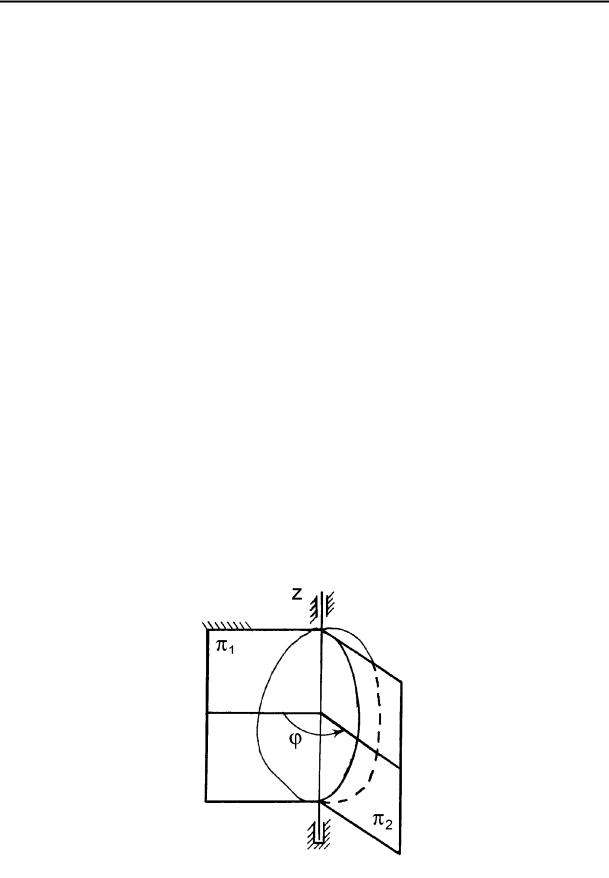
Розглянемо тверде тіло, що обертається навколо нерухомої осі z
(рис. 2.7). Проведемо через вісь обертання z дві півплощини, одна з яких
1 є нерухомою, а друга півплощина 2 незмінно поєднана з тілом і обертається разом з ним. Тоді положення тіла у будь-який момент часу t
однозначно визначає кут між півплощинами 1 і 2 , який називається кутом повороту тіла .
Рис. 2.7

135
При обертанні тіла навколо нерухомої осі z кут повороту неперервною і однозначною функцією часу:
є
t
.
(2.34)
Вираз (2.34) називається законом обертального руху тіла або
кінематичним рівнянням обертального руху.
Кут повороту |
тіла навколо нерухомої осі має знак, який залежить |
від напрямку обертання і визначається за наступним правилом. |
|
||
Кут повороту |
|
рахується додатним ( >0), якщо |
дивитися з |
додатного кінця осі |
z і бачити обертання рухомої площини 2 |
у напрямку |
|
проти руху годинникової стрілки. І навпаки, рахується від'ємним ( <0),
коли цей напрямок обертання - за годинниковою стрілкою.
Кут повороту тіла вимірюється у радіанах або обертах.
Так як один оберт складає 2π рад, тому зв'язок між кутом повороту, що вимірюється у радіанах, і кутом повороту N, що вимірюється в обертах, буде таким:
2 N ,
де N - кількість обертів тіла.
§ 7.3. Кутова швидкість і кутове прискорення тіла, що обертається
Кутова швидкість ω і кутове прискорення ε тіла, як і його кут повороту , являються кінематичними характеристиками його
обертального руху.
Визначимо ці кінематичні характеристики.

136
Кутова швидкість |
|
|
Кутова швидкість ω характеризує зміну кута повороту тіла |
|
за |
одиницю часу, тобто показує, як швидко тіло обертається. |
|
|||||||
Якщо за деякій проміжок часу |
t t1 t |
тіло здійснило поворот на |
||||||
кут 1 , то середня кутова швидкість c |
тіла за цей проміжок часу |
|||||||
дорівнює відношенню: |
|
|
|
|
|
|
|
|
с |
|
. |
|
|
|
|
||
t |
|
|
|
|
||||
|
|
|
|
|
|
|
||
Для знаходження кутової швидкості |
тіла у будь-який момент часу |
|||||||
t необхідно середню кутову швидкість |
c |
|
представити у вигляді границі, |
|||||
до якої наближається його значення, |
коли проміжок часу t |
прямує до |
||||||
нуля: |
|
|
|
|
|
|
|
|
lim |
|
|
d |
|
. |
(2.35) |
||
t o t |
|
|
dt |
|
|
|
||
|
|
|
|
|
||||
Таким чином, кутова швидкість тіла у будь-який момент часу
дорівнює першій похідній від кута повороту за часом.
Знак кутової швидкості ω визначає напрямок обертання тіла і
залежить від знака кута повороту . Якщо |
0 , то в даний момент часу |
тіло обертається в додатному напрямку, і, |
навпаки, якщо 0 , то тіло |
обертається у від'ємному напрямку. |
|
|
рад |
, |
1 |
|
|
|
Одиниця виміру кутової швидкості : |
|
|
|
, c |
||
|
|
|||||
|
с |
|
|
с |
|
|
Кутове прискорення
Кутове прискорення тіла, що обертається навколо
1 |
|
. |
|
|
|
|
|
|
|
|
|
нерухомої осі

137
характеризує зміну кутової швидкості |
за одиницю часу. |
|
Якщо за проміжок часу t t1 t |
кутова швидкість |
|
величину 1 , то середнє кутове прискорення |
|
|
проміжок часу буде дорівнювати: |
|
|
змінюється на
c |
тіла за цей |
|
с |
|
. |
|
|
t |
|
||
|
|
|
|
|
Для знаходження кутового прискоренням тіла у будь-який момент |
||||
часу t необхідно с |
представити у вигляді границі, до якої наближається |
|||
його значення, коли проміжок часу |
t прямує до нуля: |
|||
або
lim |
|
, |
|
||
t o t |
|
|
d |
|
d |
|
|
|
2 |
|
dt |
|
dt |
2 |
|
|||
|
|
||
.
(2.36)
Таким чином, кутове прискорення тіла у будь-який момент часу чисельно дорівнює першій похідній від кутової швидкості або другій похідній від кута повороту за часом.
Одиниця виміру кутового прискорення : |
рад |
, |
|
1 |
|
, |
с 2 |
. |
|
||
|
|
|
|
|
|
||||||
|
2 |
с |
2 |
|
|
|
|
||||
с |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Слід відмітити, що у випадку, коли модуль кутової швидкості |
з |
||||||||||
часом зростає ( 0 ), то обертання тіла буде |
прискореним, |
а |
коли |
||||||||
зменшується ( 0 ), то обертальний рух буде сповільненим. |
|
|
|
|
|||||||
Також зауважимо, що обертання тіла навколо осі буде прискореним,
якщо знаки перед кутовою швидкістю ω і кутовим прискоренням ε будуть однаковими, і навпаки – сповільненим, якщо знаки перед вказаними величинами будуть різними.

138
§ 7.4. Деякі випадки обертання тіла
навколо нерухомої осі
Розглянемо деякі випадки обертального руху в залежності від кінематичних характеристик тіла при обертанні навколо нерухомої осі.
1. |
Рівномірний обертальний рух |
|
|
|
|
|||
Якщо кутова швидкість тіла залишається під час його руху сталою, |
||||||||
то обертання називається рівномірним. При цьому |
кутова |
швидкість |
||||||
const , а 0 . Тоді кут повороту тіла визначається за формулою: |
||||||||
|
|
t , |
|
|
|
(2.37) |
||
або кутова швидкість буде дорівнювати |
|
|
|
|
||||
|
|
|
|
. |
|
|
|
|
|
|
t |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
У |
техніці |
швидкість рівномірного обертання тіл |
найчастіше |
|||||
визначають частотою обертання n , яка вимірюється у |
|
об. |
. |
|
||||
|
|
|
||||||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
хв. |
|
|
Відомо, що при одному оберті тіло повертається на кут 2π, а при n |
||||||||
обертах – на кут |
2 n , причому цей поворот (кут 2 n ) відбувається за одну |
|||||||
хвилину, або 60 сек. Тоді зв'язок між кутовою швидкістю |
і частотою |
n |
|||
його обертання можна виразити наступною залежністю: |
|
|
|||
|
|
2 n |
n 0,1 n . |
|
|
|
|
|
|||
t |
60 |
30 |
|
|
|
2. Рівнозмінний обертальний рух
У такому випадку обертання кутове прискорення тіла const ,
тобто його кутова швидкість за рівні проміжки часу змінюється на одну

139
і ту ж величину.
Оскільки
d dt
const
, то запишемо цей вираз наступним чином:
d dt
Для знаходження кутової швидкості від лівої та правої частин виразу (2.38) у
величин і t :
. |
(2.38) |
|
візьмемо визначені інтеграли |
верхніх та нижніх межах зміни
або
де o
|
|
t |
|
|
|
d |
|
dt . |
|
|
|
|
||
|
o |
|
o |
|
|
|
|
|
|
Після інтегрування отримаємо |
|
|
||
o t , |
||||
o t , |
(2.39) |
- початкова кутова швидкість тіла.
Далі використаємо вираз (2.35), згідно якого
d dt
. Маємо
можливість з нього визначити кут . Для цього розділимо змінні: d dt .
Замість підставимо у вираз (2.40) його значення (2.39): d o dt t dt .
(2.40)
(2.41)
Як і в попередньому випадку, знайдемо кут повороту тіла , взявши визначені інтеграли від лівої і правої частин виразу (2.41) у верхніх та