8.3. Измерение расстояний до навигационных спутников
«GPS»
В связи с тем, что любая «GPS» основана на определении расстояний до навигационных спутников, очевидно должны быть разработаны и соответствующие методы их определения.
Основной принцип определения расстояний до навигационных спутников состоит в измерении времени, за которое радиосигнал спутника достигает приемника на Земле, и в последующем вычислении по этому времени искомого расстояния.
Поскольку радиоволны распространяются с огромной скоростью, т. е. со скоростью света (около 300 000 км/с), нужно уметь очень точно определять момент выдачи сообщения навигационным спутником и момент его приема приемником «GPS» на Земле. Очевидно разница (сдвижка) во времени выдачи сигнала спутником и его приемом на Земле даст время распространения сигнала а, следовательно, и расстояние до данного спутника. При таком подходе часы в системе должны быть исключительно точными и совершенными. Действительно, при ошибке в определении времени распространения радиосигнала всего на 0,01 с, ошибка в определении расстояния составит порядка 3000 км.
На каждом навигационном спутнике, в связи с этим, установлен комплект из 4-х самых точных атомных часов, которые чрезвычайно дороги и громоздки. На всех приемниках «GPS» вынужденно, устанавливают очень дешевые и компактные кварцевые часы, которые, однако, существенно уступают по точности хода атомным.
Главной трудностью определения времени распространения радиосигнала является точное выделение момента, времени, в которое радиосигнал был передан со спутника. В системах «GPS» эта задача решена синхронизацией сигналов навигационных спутников в Космосе и приемников «GPS» на Земле таким образом, чтобы они точно в одно и то же время генерировали один и тот же бинарный (двоичный) код. Бинарный код — это очень сложная, тщательно подобранная и кажущаяся случайной последовательность логических нулей и единиц, которая повторяется каждую миллисекунду. Такие специально усложненные коды (для надежности и однозначности их сравнения) называют псевдослучайными кодами (рис. 8.6).
Учитывая, что псевдослучайные коды на спутниках и приемниках строго синхронизированы, для определения времени распространения радиосигнала и, следовательно, расстояния до данного спутника, достаточно принять от него радиосигнал и сопоставить его с точно таким же псевдослучайным кодом приемника. Сдвиг одного кода по отношению к другому будет соответствовать времени прохождения радиосигнала от навигационного спутника до приемника «GPS» (рис. 8.7).
Поскольку точность измерения времени распространения радиосигнала кварцевыми часами приемников существенно уступает точности хода атомных часов навигационных спутников, возникает проблема устранения смещения шкалы времени приемников «GPS».
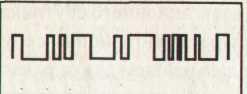
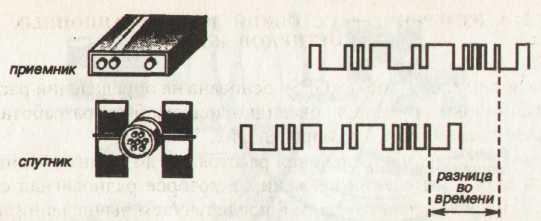 Рис.
8.6. Псевдослу-
Рис.
8.7. Определение времени
Рис.
8.6. Псевдослу-
Рис.
8.7. Определение времени
чайный код. распространения радиосигнала
по сдвижке псевдослучайных
кодов.
Можно легко установить, что если три точных измерения времени распространения радиосигналов спутников позволяют определить точное местоположение точки в трехмерном пространстве, то же самое обеспечивают четыре неточных измерения времени.
Для облегчения понимания этого принципа рассмотрим решение этой задачи в двухмерном пространстве, т. е. на плоскости, временно исключив одно измерение.
Представим себе, что мы находимся на расстоянии в 4 с от спутника А и в 6 с от спутника В. Этих двух точных измерений было бы достаточно для однозначного определения местоположения точки 1 на плоскости (рис. 8.8, точка 1).
Таким образом, местоположение точки 1 было бы установлено, если бы часы приемников «GPS» были бы столь же совершенны, как и атомные часы на навигационных спутниках. Теперь представим себе, что условно часы в приемниках отстают на одну секунду. Тогда расстояния до искомой точки были бы установлены с соответствующими ошибками и составили соответственно до спутника А — 5 с и до спутника В — 7 с. В результате положение искомой точки 1 было бы ошибочно определено в точке 2 (рис. 8.8, точка 2).
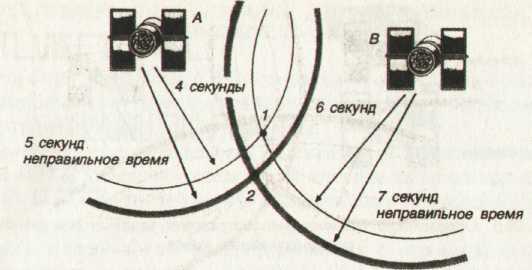
Рис. 8.8. Определение местоположения точки на плоскости по двум измерениям: 1 — по двум точным измерениям; 2 — ошибочное определение местоположения точки по двум неточным измерениям.
Следует иметь в виду, что внешне это бы выглядело абсолютно правильным результатом, поскольку у нас нет возможности установить, что часы приемника отстают.
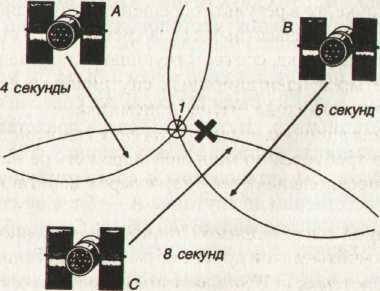
Если к этим построениям добавить еще одно измерение, что в двухмерном пространстве означает измерение расстояния до спутника С, равного, скажем, 8 с, то все три точных измерения дадут положение искомой точки 1 на пересечении трех соответствующих окружностей (рис. 8.9).
Если учесть, что часы приемника несколько отстают, то в результате трех неточных измерений будут получены три возможных местоположения одной искомой точки (точки 2, 3 и 4), которая может одновременно находиться на расстояниях 5, 7 и 9 с соответственно от спутников А, В и С, что физически невозможно (рис. 8.10).