

8.2. Принципы определения координат точек местности с
использованием GPS
Основной принцип «GPS» — использование навигационных искусственных спутников Земли в качестве подвижных геодезических пунктов (точно координированных точек отсчета) для определения расстояний до них по времени распространения излучаемых ими радиосигналов и вычисления координат на Земле на основе тригонометрических соотношений.
Если предположить, что точное местоположение любого используемого навигационного спутника системы в любой момент времени известно, и известно, как определить расстояния до каждого из них, то основополагающая идея «GPS» оказывается простой.
Допустим, мы не знаем своих координат и пытаемся их определить, используя для этой цели навигационный спутник А, находящийся в настоящий момент времени на расстоянии 21 000 км от нас (рис. 8.3).
Очевидно, область нашего местонахождения в космическом пространстве резко сократится и нас следует искать где-то на сфере с центром в спутнике А и радиусом 21 000 км.
Если же при этом известно, что расстояние от искомой точки до второго навигационного спутника В составляет 22 000 км, то единственной областью местонахождения будет линия пересечения двух сфер с центром в спутнике А и радиусом 21 000 км и с центром в спутнике В и радиусом 22 000 км, т. е. окружность (рис. 8.4).
И наконец, если измерить расстояние еще и до третьего навигационного спутника С, равное скажем 23 000 км, то возможное местоположение искомой точки уже будет сведено всего к двум точкам, находящимся на пересечении сферы с радиусом 23 000 км с окружностью, полученной от пересечения сфер с радиусами 21000 и 22 000 км (рис. 8.5).
Рис.
8.4. Определение области местоположения
точки по двум навигационным
спутникам Земли. Измерение
двух расстояний дает пинию возможного
расположения объекта
в виде окружности.
Рис.
8.5. Определение местоположения точки
по трем навигационным
спутникам Земли.
Измерение
трех расстояний
дает две возможные точки
местоположения
объекта.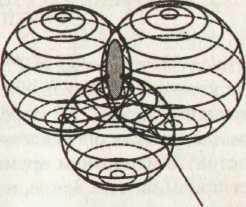
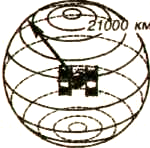
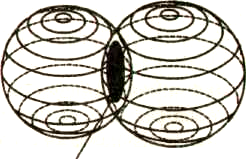
Рис.
8.3.
Определение
области
местоположения
точки
по одному
навигационному
спутнику
Земли.
Обычно одно из двух возможных решений является нереальным — например, точка расположена слишком далеко от поверхности Земли, либо имеет неправдоподобно большую скорость. Поэтому, программное обеспечение компьютеров приемников «GPS» автоматически выделяет истинное местоположение искомой точки из двух возможных. Таким образом, чтобы определить точное местоположение точки, теоретически достаточно трех измерений до трех навигационных спутников. Однако, как будет установлено далее, существует техническая причина, по которой для точного определения местоположения точки требуется еще и, как минимум, четвертое измерение до четвертого навигационного спутника.
Определив расстояния как минимум до четырех навигационных спутников (подвижных геодезических пунктов), в дальнейшем для определения координат (местоположения) точки, решают обычную задачу обратной трилатерации, т. е. обратной линейной засечки.