

4.12.2 Подвесные системы самонаведения
В подвесных автоматических системах самонаведения основание конструкции крепится к потолку, и подача огнетушащего состава на очаги горения осуществляется сверху вниз.
Блок-схема системы с совмещённым приводом к датчику наведения и лафетному стволу (рис. 4.27) состоит из внешнего датчика Д, датчиков обнаружения пламени в горизонтальной Дг и вертикальной Дв плоскостях, расположенных в соответствующих головках наведения ГН-Г и ГН-В, логических преобразователей ЛП-Г и ЛП-В, силовых приводов вращения по горизонтальной Г и по вертикальной В плоскостям, электромагнитного клапана Кл распылителя Р. Для определения точных координат загорания датчики Дг и Дв снабжены тубусами с узкими, соответственно вертикальными и горизонтальными щелями.
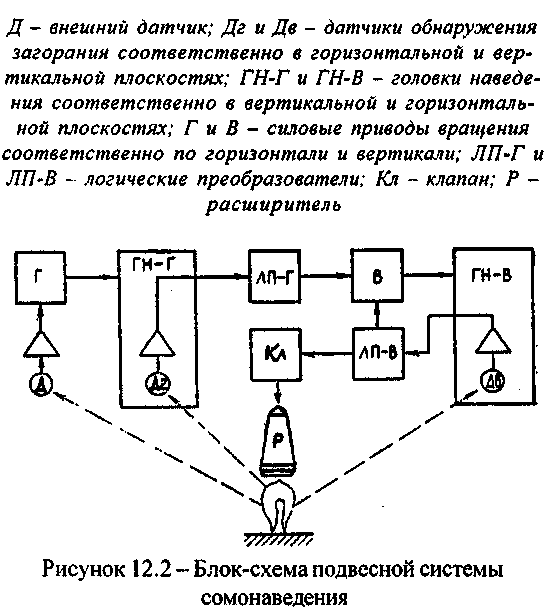
Рис. 4.27. Блок-схема подвесной системы самонаведения: Д – внешний датчик; Дг и Дв – датчики обнаружения пламени соответственно в горизонтальной и вертикальной плоскостях; ГН-Г и ГН-В – головки наведения соответственно в горизонтальной и вертикальной плоскостях; Г и В – силовые приводы вращения соответственно в вертикальной и горизонтальной плоскостях; ЛП-Г и ЛП-В – логические преобразователи; Кл – клапан; Р – распылитель
Пожар в контролируемом помещении регистрируется независимым внешним датчиком Д, сигнал с которого управляет приводом сканирования в горизонтальной плоскости Г, при этом вся установка поворачивается вокруг вертикальной оси до тех пор, пока датчик Дг, установленный в головке наведения по горизонтальной плоскости ГН-Г, не зафиксирует очаг горения; благодаря логическому преобразователю ЛП-Г горизонтальное сканирование прекращается, и начинается движение ствола системы от привода В вокруг горизонтальной оси сверху вниз. При обнаружении пламени датчиком Дв благодаря преобразователю ЛП-В ствол с распылителем останавливается, включается электромагнитный клапан Кл подачи огнетушащего вещества, которое транспортируется к месту пожара через распределитель Р.
Если горение возникает непосредственно на оси визирования Дг, то сканирование и поиск пламени осуществляется сразу по вертикальной плоскости.
В автоматической системе самонаведения, представленной на рисунке 4.28, лафетный ствол имеет индивидуальный привод. В период дежурства датчик обнаружения возгорания 1, закрепленный под потолком защищаемого производственного помещения, осуществляет непрерывное вращение вокруг вертикальной оси и колебательное движение вокруг горизонтальной оси. В качестве фотоэлектрического датчика используется преобразователь ИК-излучения. Напольное пространство 2 условно разбито на равные участки. При обнаружении пламени благодаря логической схеме преобразования определяются координаты пожара, включается сканирование лафетного ствола 3 и осуществляется процесс его наведения на источник возгорания, после чего обеспечивается доставка огнетушащего вещества непосредственно в зону возгорания.
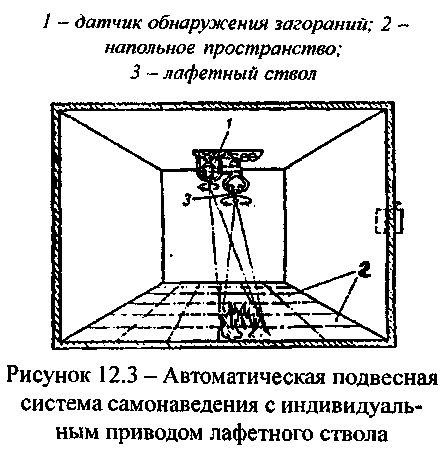
Рис. 4.28. Автоматическая подвесная система самонаведения с индивидуальным приводом лафетного ствола: 1 – датчик обнаружения загораний; 2 – напольное пространство; 3 – лафетный ствол
Данная система в сочетании с мозаичным датчиком позволяет определять координаты возгорания без сканирования чувствительного элемента по двум взаимно-перпендикулярным плоскостям.