

Заключение
Вопросы, рассмотренные в данном учебном пособии, позволяют студентам правильно осмыслить основные положения дисциплины «Теория механизмов и машин».
Примеры, представленные в пособии, помогают более глубоко освоить теоретический материал и вырабатывают умения студентов использовать его при решении конкретных технических задач.
Учебное пособие призвано помочь формированию целостного представления о проектировании исполнительных механизмов и дать начальные сведения для изучения специальных технических дисциплин.
Библиографический список
Артоболевский И.И. Теория механизмов и машин / И.И. Артоболевский. М.: Наука, 1988. – 640 с.
Левитская О.Н., Левитский Н.И. Курс теории механизмов и машин / О.Н. Левитская, Н.И. Левитский. М.: Высш. шк., 1985. – 279 с.
Механика машин / И.И. Вульфсон, М.Л. Ерихов, М.З. Коловский и др. М.: Высш. шк., 1996. – 511 с.
Попов С.А. Курсовое проектирование по теории механизмов и механике машин / С.А. Попов, Г.А. Тимофеев; под ред. К.В. Фролова. М.: Высш. шк., 1998. – 351 с.
Теория механизмов и механика машин / К.В. Фролов, С.В. Попов, А.К. Мусатов и др. / М.: Изд-во МГТУ им. Баумана, 2002. – 664 с.
Смелягин А.И. Теория механизмов и машин / А.И. Смелягин. М.: ИНФРА-М; Новосибирск: Изд-во НГТУ, 2003. – 263 с.
Приложение 1
Приложение 2
ОГЛАВЛЕНИЕ
1. СТРУКТУРА МЕХАНИЗМОВ 10
1.1. Основные понятия и определения в теории механизмов и машин 10
1.2. Классификация кинематических пар 11
1.3. Структура и кинематика плоских механизмов 17
1.4. Структурная формула кинематической цепи общего вида 18
1.5. Структурная формула плоских механизмов 20
1.6. Пассивные связи и лишние степени свободы 22
1.7. Замена в плоских механизмах высших кинематических пар низшими 24
1.8. Классификация плоских механизмов 25
1.9. Структурные группы пространственных механизмов 31
2. Анализ механизмов 33
2.1. Кинематический анализ механизмов 33
2.1.1. Определение положений звеньев плоской незамкнутой кинематической цепи 34
2.1.2. Матричная форма уравнения преобразования координат точек звеньев 35
2.1.3. Определение положений, скоростей и ускорений звеньев пространственных механизмов 38
2.1.4. Графическое определение положений звеньев механизма и построение траектории 42
2.1.5. Определение скоростей и ускорений точек звеньев методом планов 44
2.1.6. Свойство планов скоростей 46
2.1.7. Построение плана скоростей и ускорений кулисного механизма 47
2.1.8. Аналоги скоростей и ускорений 50
2.2. Силовой анализ механизмов 52
2.2.1. Условие статической определимости кинематических цепей 53
2.2.2. Силы, действующие на звенья механизма 56
2.2.3. Силы инерции звена, совершающего возвратно-поступательное движение 57
2.2.4. Силы инерции звена, совершающего вращательное движение вокруг неподвижной оси 57
2.2.5. Силы инерции звена, совершающего плоское движение 59
2.3. Определение реакций в кинематических парах групп Ассура 60
2.3.1. Силовой расчет начального звена 64
2.4. Движение машин и механизмов под действием приложенных сил 67
2.4.1. Характеристика сил, действующих на звенья механизма 67
2.5. Приведение сил и масс в плоских механизмах 68
2.6. Методы интегрирования уравнения движения машинного агрегата 77
2.7. Регулирование неравномерности движения машин и механизмов 83
2.7.1. Определение момента инерции маховика (при Jn=const) 86
2.7.2. Определение момента инерции маховика в случае, когда Jn=Var 91
2.7.3. Метод Н.И. Мерцалова (приближенный метод) 93
2.7.4. Метод Б.М. Гутьяра (точный метод) 96
2.7.5. Определение момента инерции маховика (метод Ф. Виттенбауэра) 98
2.8. Уравновешивание механизмов 109
2.8.1. Уравновешивание вращающихся звеньев 109
2.8.2. Уравновешивание механизмов 114
2.8.3. Статическое уравновешивание масс плоских механизмов 115
2.8.4. Приближенное статическое уравновешивание масс плоских механизмов 118
3. Пример выполнения структурного, кинематического и силового анализа плоского рычажного механизма 119
3.1. Исходные данные 119
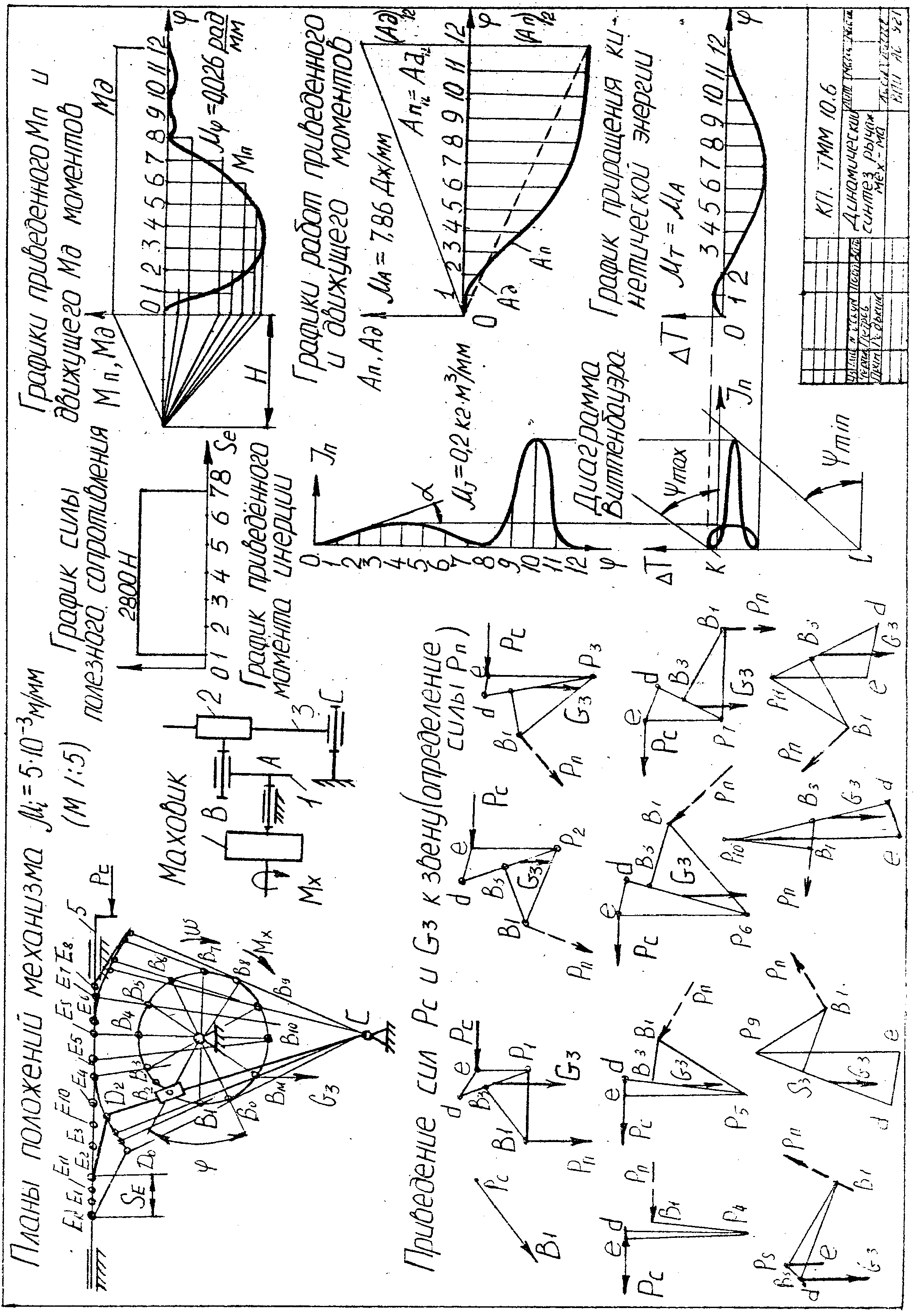
3.2. Динамический синтез рычажного механизма 121
3.2.1. Построение схемы механизма 121
3.2.2. Структурный анализ 122
3.2.3. Построение повернутых планов скоростей 122
3.2.4. Приведение внешних сил 124
3.2.5. Определение работы приведенного момента. 125
3.2.6. Определение величины работы движущего момента 125
3.2.7. Определение приращения кинетической энергии 126
3.2.8. Определение приведенного момента инерции 126
3.2.9. Определение момента инерции маховика. 128
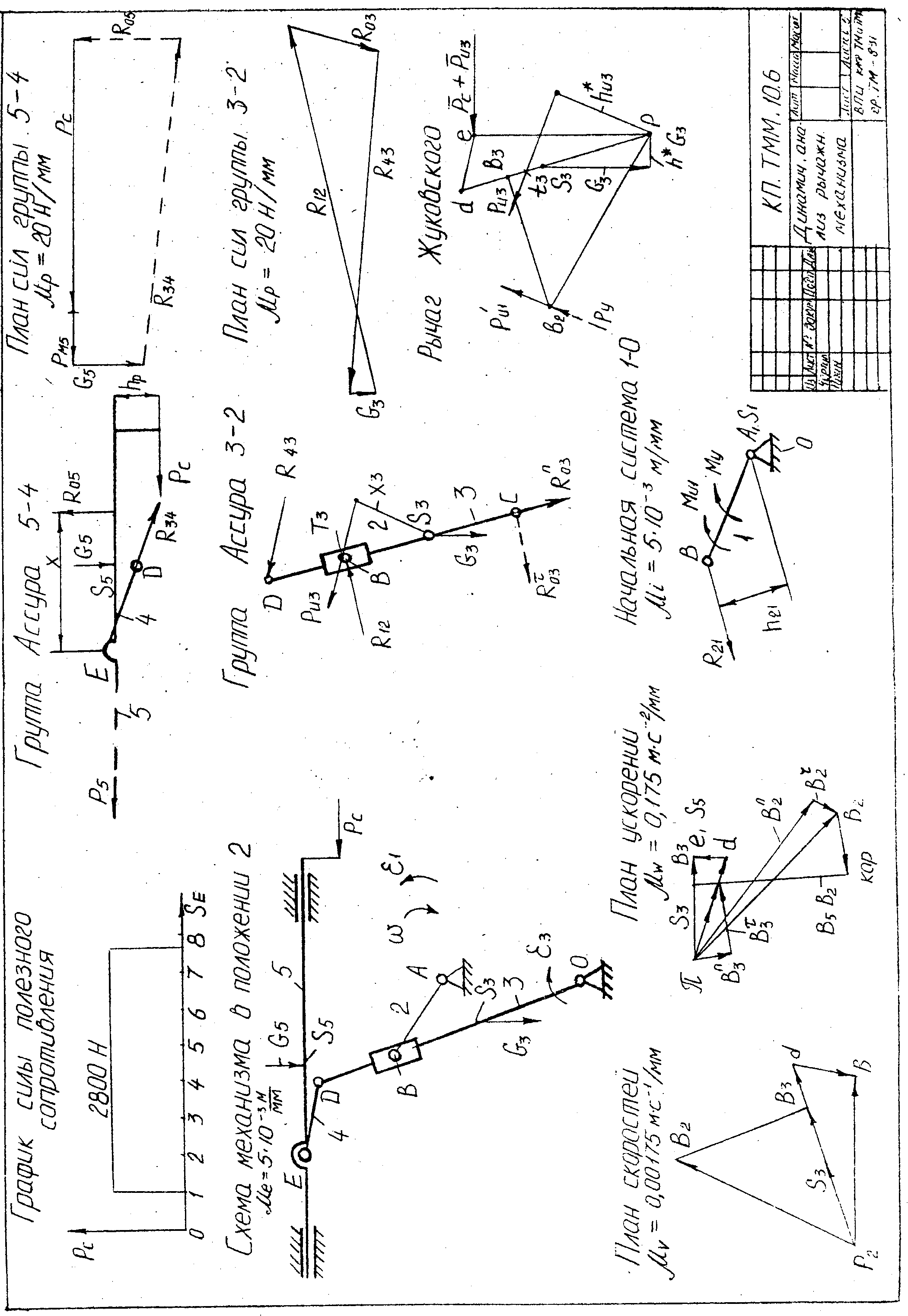
3.3. Динамический анализ рычажного механизма 129
3.3.1. Определение углового ускорения кривошипа 129
3.3.2. Построение планов скоростей и ускорений 130
Ускорение точки В2 равно ускорению точки В1 130
3.3.3. Определение сил инерции 133
3.3.4. Расчёт группы 5,4 134
3.3.5. Расчёт группы 3,2 134
3.3.6. Расчёт начальной системы 1,0 135
Из равновесия звена 1 следует, что 135
3.3.7. Проверка силового расчета 135
4. Синтез механизмов 137
4.1. Постановка задачи синтеза механизмов 137
4.1.1. Задачи синтеза механизмов. Требования экономики, охраны труда и окружающей среды, учитываемые при синтезе механизмов 137
4.1.2. Входные и выходные параметры синтеза 139
4.1.3. Основные дополнительные условия синтеза 141
4.1.4. Целевая функция 142
4.1.5. Ограничения 145
4.1.6. Математическая постановка задачи синтеза механизма 147
4.2. Математические методы в синтезе механизмов 149
4.2.1. Методы оптимизации механизмов с применением ЭВМ 149
4.2.2. Случайный поиск 150
4.2.3. Направленный поиск 151
4.2.4. Штрафные функции 156
4.2.5. Метод внутренних штрафных функций (метод барьеров) 157
4.2.6. Локальный и глобальный экстремумы 158
4.2.7. Комбинированный поиск 161
4.3. Методы теории приближения функций в синтезе механизмов 161
4.3.1. Необходимость использования в синтезе механизмов приближенных методов 161
4.3.2. Сведения из теории приближения функций 162
4.3.3. Постановка задачи приближенного синтеза механизмов по Чебышеву 170
4.4. Синтез четырехзвенных механизмов с низшими парами 173
4.4.1. Постановка задачи синтеза передаточного шарнирного четырехзвенника 173
4.4.2. Вычисление трех параметров синтеза 177
4.4.3. Коэффициент изменения средней скорости выходного звена механизма 179
4.4.4. Синтез шарнирного четырехзвенника по коэффициенту увеличения средней скорости коромысла 182
4.5. Синтез направляющих механизмов и мальтийских механизмов 184
4.5.1. Точные направляющие механизмы 184
4.5.2. Методы синтеза приближенных направляющих механизмов 185
4.5.3. Механизмы Чебышева 188
4.5.4. Теорема Робертса 191
4.5.5. Мальтийские механизмы 193
5. МЕХАНИЗМЫ С ВЫСШИМИ ПАРАМИ 199
5.1. Зубчатые механизмы 199
5.1.1. Общие сведения. Основная теорема зацепления. 199
5.1.2. Геометрические элементы зубчатых колес 206
5.2. Методы изготовления зубчатых колес 209
5.2.1. Передаточное отношение 213
5.3. Планетарные и дифференциальные механизмы 216
5.4. Кулачковые механизмы 219
5.4.1. Виды кулачковых механизмов 219
5.4.2. Проектирование кулачковых механизмов 221
Учебное издание
Рукин Юрий Борисович Жилин Роман Анатольевич Нилов Владимир Александрович
Еськов Борис Борисович
ОСНОВЫ МЕХАНИКИ МАШИН И ПРОЕКТИРОВАНИЯ МЕХАНИЗМОВ
В авторской редакции
Подписано к изданию 06.12.2007.
Уч.-изд. л. 13,0.
ГОУВПО
«Воронежский государственный технический университет»