

2.8.Уравновешивание механизмов
2.8.1.Уравновешивание вращающихся звеньев
Рассмотрим некоторые задачи динамического синтеза, связанные с распределением масс звеньев по условиям уменьшения давлений на стойку механизма. Простейшей задачей этого типа является задача уравновешивания вращающегося звена, при котором полностью или частично устраняются динамические реакции на его опоры, т.е. реакции, зависящие от ускорений (иначе – от сил инерции). Для полного устранения этих реакций необходимо, чтобы главный вектор Рn и главный момент сил инерции Mn были равны нулю в любой момент движения:
Рn = 0, (2.64)
Mn = 0. (2.65)
Иногда ограничиваются выполнением только условия (2.47), которое равносильно условию постоянства положения центра масс звена, или, что то же, условию расположения центра масс на оси вращения звена. Распределение массы вращающегося звена, переводящее его центр масс на ось вращения, называется статическим уравновешиванием вращающегося звена.
Необходимость статического уравновешивания быстро вращающихся звеньев можно пояснить примером. Пусть масса звена m = 10 кг, постоянная угловая скорость = 1000 рад/с (частота вращения n 9500 об/мин), расстояние центра масс от оси вращения rS = 0,1 мм. Тогда величина силы инерции найдется по формуле Рn=mrS2, или Рn = 10 0,0001 10002 = 1000 Н.
Вес звена приблизительно равен 100 Н, т.е. в рассматриваемом случае при очень малом смещении центра масс в 0,1 мм сила инерции превосходит вес в 10 раз. Соответственно возрастут реакции в опорах звена. Кроме того, следует учесть, что в отличие от сил тяжести силы инерции, а следовательно и динамические реакции имеют переменные направления и могут вызвать нежелательные колебания звеньев механизма.
Если условие (2.47) не выполнено, то звено называется статически неуравновешенным и за меру статической неуравновешенности или статического дисбаланса принимают статический момент массы звена относительно оси вращения mrS.
Неуравновешенность в рассматриваемом случае называют статической, так как ее можно обнаружить статическим испытанием. С этой целью звено цилиндрической формы устанавливают на два горизонтальных ножа (бруска). Если центр масс расположен на оси цилиндра, то звено будет находиться в равновесии при любом положении, в противном случае оно покатится и будет двигаться, пока не займет положение устойчивого равновесия, при котором центр масс имеет наинизшее расположение (рис. 2.42).
Для статического уравновешивания надо в направлении, противоположном центру масс звена, установить добавочную массу m (противовес) на расстоянии rk от оси вращения (рис. 2.42, а). Если будет выполнено условие
![]() , (2.66)
, (2.66)
то сила инерции противовеса Рuk окажется противоположной силе инерции Рk неуравновешенного звена. Результирующая сила инерции при этом условии будет равна нулю. Условие (2.66) достигается обычно путем проб. Иногда установку противовеса заменяют удалением (например высверливанием) массы mk. Центр удаляемой массы и центр масс звена располагаются в этом случае по одну сторону от оси вращения.
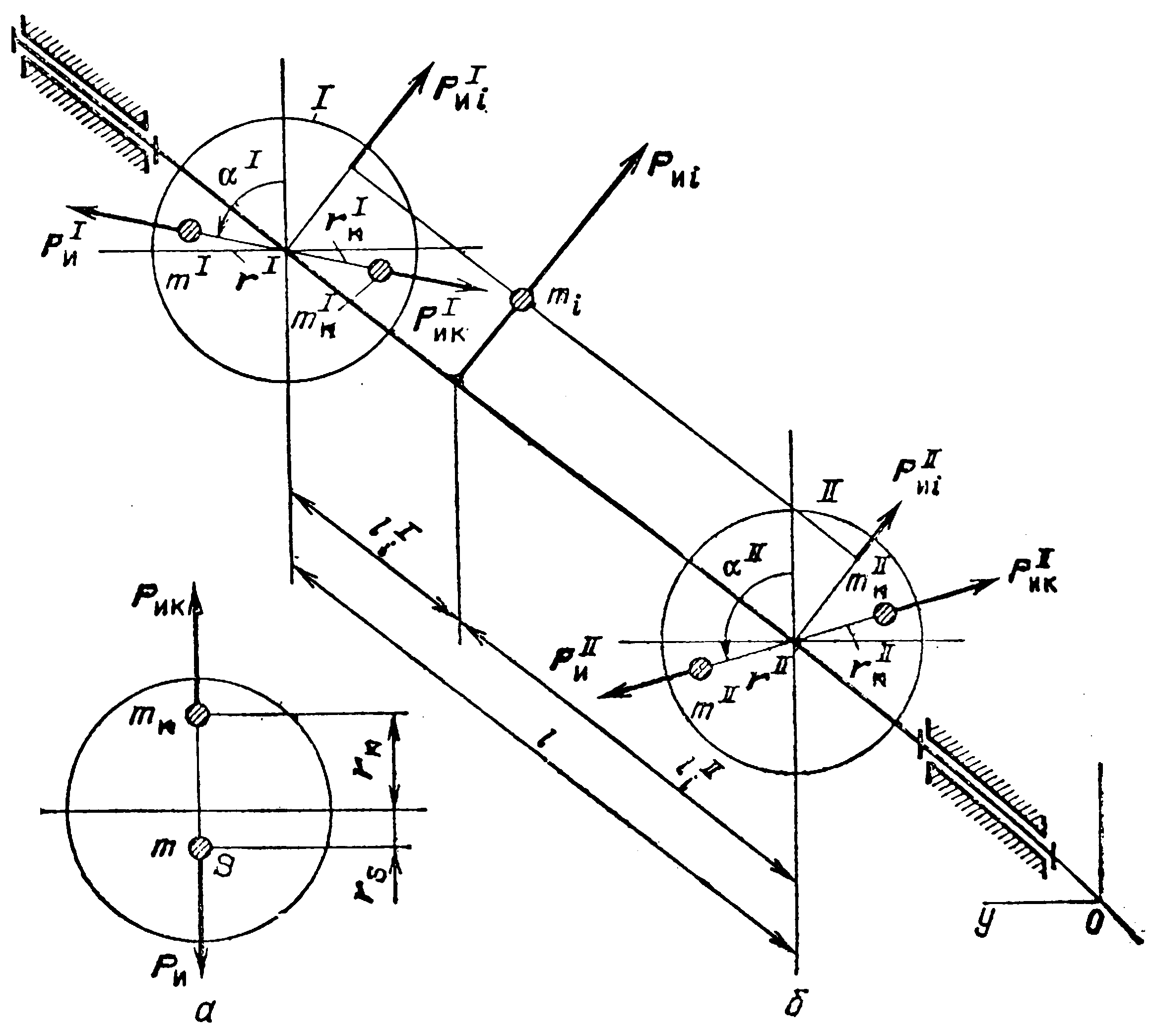
Рис. 2.69
Статического уравновешивания достаточно только для звеньев, имеющих малую протяженность вдоль оси вращения (например шкивы, маховики и т.п.) . Для звеньев другой формы (например для валов) должны быть выполнены оба условия уравновешенности звена – (2.64) и (2.65). В этом случае равны нулю и главный вектор, и главный момент сил инерции, следовательно, полностью устраняется давление на стойку от сил инерции. Распределение масс вращающегося звена, устраняющее давление от сил инерции этого звена на стойку, называется полным (иногда динамическим) уравновешиванием вращающегося звена.
Покажем, что полное уравновешивание можно выполнить установкой противовесов в двух произвольно выбранных плоскостях I и II, называемых плоскостями исправления (рис. 2.42, б). При равномерном вращении звена с угловой скоростью элементарной массе mк соответствует элементарная сила инерции
![]() ,
,
где rk – радиус-вектор элементарной массы.
Заменим силу Рnк двумя параллельными составляющими в плоскостях исправления:
![]()
Просуммируем эти составляющие, каждые в своей плоскости. Получим, что все элементарные силы инерции свелись к двум силам, расположенным в плоскостях исправления под углами I и II к оси X:
![]() .
.
Эти силы отличаются между собой как по величине, так и по направлению. Иногда говорят, что они образуют неуравновешенный крест.
Силы
![]() и
и
![]() могут быть представлены как силы инерции
масс mI
и mII,
находящихся на расстояниях rI
и rII
от оси вращения. Тогда мерой полной
неуравновешенности можно считать
величины статических дисбалансов в
плоскостях исправления: I=mIrI
и II=mIIrII.
могут быть представлены как силы инерции
масс mI
и mII,
находящихся на расстояниях rI
и rII
от оси вращения. Тогда мерой полной
неуравновешенности можно считать
величины статических дисбалансов в
плоскостях исправления: I=mIrI
и II=mIIrII.
Практически динамическое уравновешивание
может быть выполнено путем установки
в плоскостях исправления (отсюда название
этих плоскостей) двух противовесов.
Величины и расположение этих противовесов
должны быть выбраны так, чтобы их силы
инерции
![]() и
и
![]() уравновешивали силы
уравновешивали силы
![]() и
и
![]() ,
т.е. были им равны и противоположно
направлены. Массы противовесов и
выбираются из условий
,
т.е. были им равны и противоположно
направлены. Массы противовесов и
выбираются из условий
![]() ,
,
а углы их расположения находятся по соотношениям
![]() .
.
Установку противовесов можно заменить
удалением масс
![]() .
Тогда
.
Тогда
![]() .
Углы I
и II
и величины дисбалансов I
и II
в плоскостях исправления находятся,
как правило, экспериментальным путем.
Экспериментальное определение
неуравновешенности вращающегося звена
и ее устранение называется балансировкой.
Она производится на специальных
устройствах, называемых балансировочными
станками.
.
Углы I
и II
и величины дисбалансов I
и II
в плоскостях исправления находятся,
как правило, экспериментальным путем.
Экспериментальное определение
неуравновешенности вращающегося звена
и ее устранение называется балансировкой.
Она производится на специальных
устройствах, называемых балансировочными
станками.
Для некоторых вращающихся звеньев, например для коленчатых валов двигателей, можно определить противовесы расчетным путем из обычных условий равновесия сил, так как величины и расположение неуравновешенных масс в этом случае находятся непосредственно по чертежу.