

5.4.Кулачковые механизмы
5.4.1.Виды кулачковых механизмов
Во многих отраслях техники получили широкое распространение кулачковые механизмы. Принципиальная схема кулачкового механизма показана на рис. 5.18.
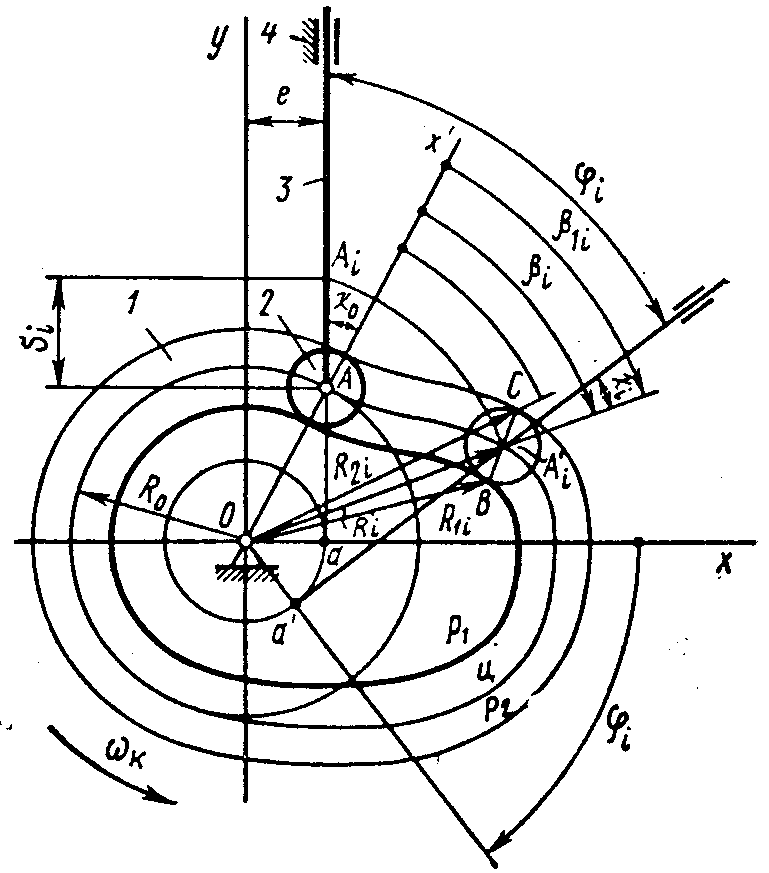
Рис. 5.117
Кулачок 1 вращается относительно оси О; ролик 2 соприкасается с поверхностью кулачка и приводит в движение толкатель 3, который имеет направляющую 4.
В приборах с небольшими нагрузками применяют остроконечный толкатель без ролика. Кроме прямолинейно движущегося толкателя выходным звеном может быть коромысло О1А (рис. 5.19), которое вращается относительно закрепленной на стойке точки. Непрерывный контакт ролика с профилем кулачка может быть обеспечен внешней силой (пружиной и др.), приложенной к толкателю – силовое замыкание. Геометрическое замыкание обеспечивается выполнением в кулачке паза, в котором движется ролик.
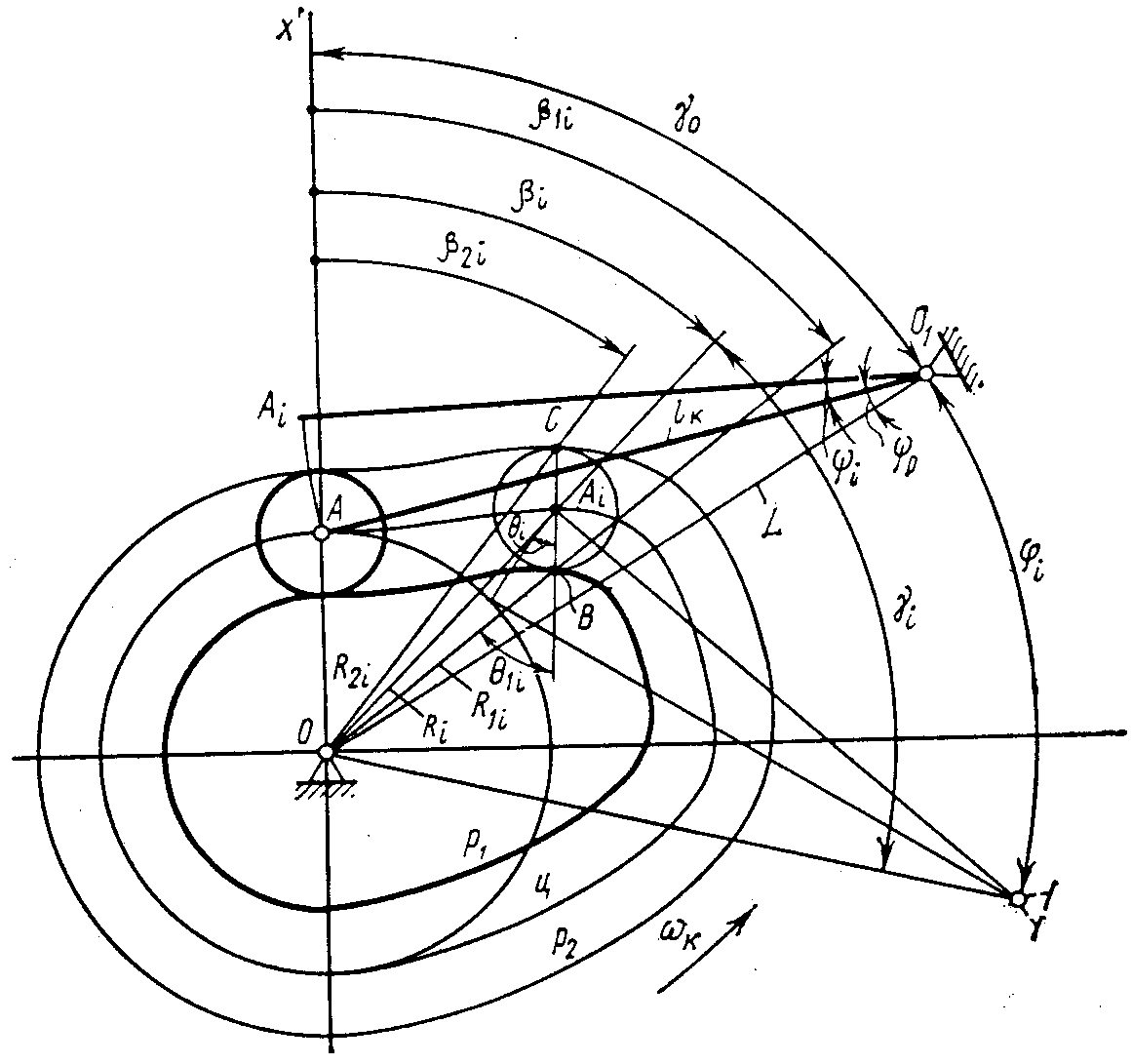
Рис. 5.118
Кулачковые механизмы используются и как управляющие механизмы (например, управляющие работой клапанов), и как силовые, создающие крутящий момент на валу кулака (например, кулачковые разгружатели возмущающего момента). Основными входными параметрами синтеза являются функция положения толкателя или создаваемый кулачковым разгружателем крутящий момент; дополнительными параметрами синтеза – максимально допустимый угол давления в высшей кинематической паре [α] или минимально допустимый радиус кривизны профиля кулака ρmin. Выходными параметрами синтеза являются размеры кулачкового механизма и координаты профиля кулака.
5.4.2.Проектирование кулачковых механизмов
При проведении синтеза кулачковых механизмов можно выделить три этапа:
Выбор закона движения толкателя (или функции положения; обычно ее записывают в виде: s = s (q), где s – перемещение толкателя, рис. 5.20);
Определение минимальных размеров механизма (радиуса начальной шайбы r0, эксцентриситета е);
Определение профиля кулака.
Рис. 5.119
Рассмотрим более подробно эти этапы.
I этап. В законе движения толкателя можно выделить в общем случае четыре фазы, которые представлены на циклограмме (рис. 5.21): удаления, дальнего стояния, возвращения и ближнего стояния. На фазе удаления происходит перемещение толкателя из самого ближнего к кулаку положения. На фазе возвращения толкатель возвращается в ближнее положение. На фазах дальнего и ближнего стояния перемещения толкателя не происходит. Выбор закона движения толкателя проводится для фаз удаления и возвращения.
Рис. 5.120
Четырем фазам соответствуют углы поворота кулака: qI, qII, qIII, qIV. В некоторых механизмах (например, кулачковых разгружателях) фаза qII или qIV может оказаться равной 0. Углы qI, qII, qIII, qIV обычно определяются технологическим процессом, для которого проектируется механизм, и поэтому являются заданными. Также заданным является ход толкателя – Smax.
Обычно выбирают не саму функцию s(q),
а ее вторую производную – аналог
ускорения
![]() .
Самая простая функция
– ступенчатая (рис. 5.22, а). Рассмотрим
ее.
.
Самая простая функция
– ступенчатая (рис. 5.22, а). Рассмотрим
ее.
Введем единичную функцию :
 . (5.16)
. (5.16)
Рис. 5.121
Тогда
![]() можно записать в следующем виде:
можно записать в следующем виде:
 (5.17)
(5.17)
Здесь С1 и С2 – постоянные интегрирования, которые найдем из начальных условий:
![]() .
.
Отсюда С1 = 0, С2 = 0. Для отыскания амплитуды а0 воспользуемся условием: s(qI) = smax, следовательно:
 (5.18)
(5.18)
Зная амплитуду а0, можно
построить графики функций s(q)
и
![]() (рис. 5.23, б, в).
(рис. 5.23, б, в).
Недостаток рассмотренного закона – скачок аналога ускорения (и, следовательно, ускорения) при q = 0, q = qI/2 и q = qI, что приводит к скачкообразному изменению сил инерции толкателя в этих положениях и появлению ударной нагрузки на механизм. Скачкообразное изменение ускорения называют мягким ударом. (Существует понятие и жесткого удара, при котором скачкообразно изменяется скорость толкателя, при этом ускорение стремится к бесконечности.) Для избежания ударной нагрузки используют синусоидальный закон изменения аналога ускорения (рис. 5.23).
Обозначив амплитуду аналога ускорения а0, запишем в виде:
 (5.19)
(5.19)
Найдем постоянные интегрирования из
условий:
![]() .
Отсюда следует, что С2 =
0,
.
Отсюда следует, что С2 =
0,
![]() . Подставляя значение С1, перепишем
аналог скорости в виде:
. Подставляя значение С1, перепишем
аналог скорости в виде:
![]() (5.20)
(5.20)
Рис. 5.122
Максимальный ход толкателя s = smax будет в конце участка удаления, т.е. при q = qI. Подставляя s(qI) = smax в выражение для перемещения толкателя, получим значение амплитуды a0:
![]() . (5.21)
. (5.21)
Из сравнения выражений (5.21) и (5.18) видно, что безударная работа кулачкового механизма достигается за счет увеличения амплитуды а0 в /21,57 раза.
II этап. Определение минимальных размеров кулачкового механизма.
Рассмотрим пример с остроконечным поступательно движущимся толкателем (рис. 5.24, а). В таком механизме надо выбрать минимальный радиус r0 начальной шайбы и эксцентриситет e (расстояние от линии действия толкателя до оси вращения кулака). В этом механизме уменьшение радиуса r0 приводит к увеличению угла давления ; при большом угле давления возможно заклинивание механизма. Поэтому минимальные размеры механизма выбирают из условия ограничения «сверху» угла давления.
Рис. 5.123
Рассмотрим графический метод. Исключая
q из полученных функций
s(q)
и
,
построим в координатах
![]() две кривые, называемые характеристиками
угла давления: в первой четверти –
для фазы возвращения, а во второй – для
фазы удаления (рис. 5.24, б). Отметим, что
аналог скорости толкателя
для вращающегося кулака и поступательно
движущегося толкателя измеряется в
единицах длины, так же, как и перемещение
толкателя s(q).
Масштаб по осям s и
две кривые, называемые характеристиками
угла давления: в первой четверти –
для фазы возвращения, а во второй – для
фазы удаления (рис. 5.24, б). Отметим, что
аналог скорости толкателя
для вращающегося кулака и поступательно
движущегося толкателя измеряется в
единицах длины, так же, как и перемещение
толкателя s(q).
Масштаб по осям s и
![]() должен быть одинаковым!
должен быть одинаковым!
Обозначим: [у], [в] – допустимые углы давления на фазе удаления и возвращения соответственно. Проведем касательные к характеристикам угла давления под углами к вертикальной оси: [у] – на фазе удаления, [в] – на фазе возвращения. Касательные пересекутся в некоторой точке О. Если радиус начальной шайбы выбрать равным длине отрезка ОО1, а эксцентриситет е – равным расстоянию от точки О до вертикальной оси (рис. 5.24, б), то получим минимально возможные размеры, при которых ни одно значение угла давления на фазе удаления и на фазе возвращения не превышает допустимых [у] и [в], причем в двух положениях максимальные значения углов давления равны [у], [в] (а именно в тех положениях, в которых касательные соприкасаются с характеристиками угла давления). Если начало отрезка r0 выбрать в заштрихованной области, то радиус начальной шайбы кулака увеличится, а максимальные значения угла давления уменьшатся. Поэтому, в частности, округлять значение r0 следует в большую сторону.
Рассмотрим пример кулачкового механизма с плоским толкателем. В таком механизме угол давления всегда постоянный, в частности, равен 0, как на рис. 5.25, а, поэтому внутренние условия передачи сил благоприятные, опасности заклинивания нет.
Рассмотрим графический метод определения радиуса начальной шайбы. Можно показать, что радиус кривизны ρА в точке контакта А определяется следующей суммой (рис. 5.25, а):
![]() (5.22)
(5.22)
Чтобы выполнялось условие ρА > 0, надо, чтобы
![]() . (5.23)
. (5.23)
Для того чтобы минимальный радиус
кривизны кулака
![]() ,
надо увеличить r0
на длину ρmin;
тогда условие (5.23) перепишется в виде:
,
надо увеличить r0
на длину ρmin;
тогда условие (5.23) перепишется в виде:
![]() . (5.24)
. (5.24)
Рис. 5.124
Аналог ускорения толкателя
![]() при вращающемся кулаке и поступательно
движущемся толкателе измеряется в
единицах длины, так же, как и перемещение
толкателя s(q).
Для графического определения r0,
удовлетворяющего условию (5.23), необходимо
выполнить следующие построения. Из
функций s(q)
и
исключается q и
строится кривая в координатах
при вращающемся кулаке и поступательно
движущемся толкателе измеряется в
единицах длины, так же, как и перемещение
толкателя s(q).
Для графического определения r0,
удовлетворяющего условию (5.23), необходимо
выполнить следующие построения. Из
функций s(q)
и
исключается q и
строится кривая в координатах
![]() (рис. 5.6, б), причем масштаб осей выбирается
одинаковым. Под углом 450 проводится
касательная к отрицательной части
кривой. Откладывая вниз от точки
пересечения касательной с вертикальной
осью отрезок, равный ρmin,
получаем точку О. Выбирая радиус r0
больше, чем длина отрезка ОО1,
мы получим выполнение условия (9) в любой
точке профиля кулака.
(рис. 5.6, б), причем масштаб осей выбирается
одинаковым. Под углом 450 проводится
касательная к отрицательной части
кривой. Откладывая вниз от точки
пересечения касательной с вертикальной
осью отрезок, равный ρmin,
получаем точку О. Выбирая радиус r0
больше, чем длина отрезка ОО1,
мы получим выполнение условия (9) в любой
точке профиля кулака.
III этап. Определение профиля кулака.
Рассмотрим пример с остроконечным толкателем. Предварительно были найдены: s(q), r0, e. Требуется найти профиль кулака, т.е. положение точки контакта А кулака и толкателя в локальной системе координат х10у1, связанной с кулаком (рис. 5.26). Эти данные вводятся в станок с ЧПУ для изготовления кулака.
Рис. 5.125
Введем векторы-столбцы:
 . (5.25)
. (5.25)
и матрицу перехода во вращательной кинематической паре О:
 . (5.26)
. (5.26)
По аналогии с пространственными механизмами запишем выражение для перехода от локальной системы координат х10у1 к неподвижной системе координат х0у:
![]() . (5.27)
. (5.27)
Отсюда найдем
![]() :
:
![]() . (5.28)
. (5.28)
Матрица перехода H01(q) является ортогональной; для нее справедливо:
![]() , (5.29)
, (5.29)
где
![]() – транспонированная матрица. С учетом
(5.29) раскроем выражение (5.28):
– транспонированная матрица. С учетом
(5.29) раскроем выражение (5.28):
 (5.30)
(5.30)
Для замены трения скольжения на трение качения остроконечный толкатель снабжают роликом (рис. 5.27).
В этом случае расчетный профиль (его называют теоретическим) заменяют на эквидистанту (отстающую от теоретического профиля на радиус ролика rp кривую), называемую рабочим профилем. Радиус ролика rp выбирают из условия:
![]() . (5.31)
. (5.31)
В этом случае вектор-столбец неподвижных координат точки контакта А примет следующий вид:
 . (5.32)
. (5.32)
Рис. 5.126
Получим выражение для профиля кулака с роликовым толкателем:
 (5.33)
(5.33)
Угол давления α в каждом положении может быть найден по следующей формуле, полученной из геометрических построений (рис. 5.28):
![]() . (5.34)
. (5.34)
В кулачковом механизме с плоским толкателем (рис. 5.11) изменится только вектор-столбец неподвижных координат точек контакта А:
 . (5.35)
. (5.35)
Рис. 5.127
Тогда локальные координаты кулака, взаимодействующего с плоским толкателем, равны:
 . (5.36)
. (5.36)
При расчете кулачкового механизма на разных этапах использовались графические и аналитические методы. В этом нет противоречия, т.к. графический метод использовался при определении минимальных размеров, где не требуется высокая точность (полученные результаты округляются); аналитические методы использовались при интегрировании закона движения и при профилировании кулака, где от точности вычислений зависит точность воспроизведения заданного закона движения.