

Алгоритм с перестройкой вероятностных характеристик поиска
В соответствии с алгоритмом, перемещение в пространстве независимых переменных можно записать в виде:

![]() - вектор оптимальных
значений переменных за jпредыдущих шагов
- вектор оптимальных
значений переменных за jпредыдущих шагов
![]() - минимальное
значение функции качества за jпредыдущих шагов.
- минимальное
значение функции качества за jпредыдущих шагов.
Самообучение проявляется в перестройке вероятностных характеристик поиска, т.е. целенаправленного воздействия на случайный выбор направления рабочего шага, т.е. вектор E.
составляющие Е можно определить по зависимости:
![]()
![]() -
случайное число, равномерно распределенное
на интервале
-
случайное число, равномерно распределенное
на интервале
![]() ;
;
![]()
Вероятностное воздействие на случайный вектор осуществляется следующим образом:
где pк– вектор выбора случайного шага
![]()
![]()
Алгоритм обучения
реализуется путем изменения параметров
памяти
![]() при
помощи следующей рекуррентной формулы:
при
помощи следующей рекуррентной формулы:
![]()
![]() -
величина, определяющая скорость обучения
-
величина, определяющая скорость обучения
![]() -
приращение к-ого аргумента на i-ом
шаге поиска
-
приращение к-ого аргумента на i-ом
шаге поиска
Числовые параметры:
![]() ;
;
![]() ;
;![]()
Глобальный случайный поиск с независимым выбором плотности распределения пробных шагов

где
![]() -
этоi-ое пробное состояние
выбранное случайно и сохраняемое в
памяти в случае удачной пробы
-
этоi-ое пробное состояние
выбранное случайно и сохраняемое в
памяти в случае удачной пробы![]()
![]() - вычисленное в
i-ом пробном состоянии
значение функции качества и сохраненное
в памяти в случае удачной пробы
- вычисленное в
i-ом пробном состоянии
значение функции качества и сохраненное
в памяти в случае удачной пробы
Для равномерной
плотности распределения пробных шагов,
плотность разбивается на «к» этапов,
содержащих Njпробных шагов, где![]() .
.
Каждый пробный
шаг, осуществленный внутри гиперпаралл.
пространства независимых переменных
![]() ,
ограничен:
,
ограничен:
![]()
причем стороны гип – да с каждым j-ым этапом уменьшаются в «С», большее 1 раз, по сравнению сj-1 этапом в соответствии с формулой:
где
![]() - точка, соответствующая пробному шагу
с наименьшим значением функции качества
из всех пробных шагов наj-1
этапе.
- точка, соответствующая пробному шагу
с наименьшим значением функции качества
из всех пробных шагов наj-1
этапе.
Несмотря на равномерную плотность распределения пробных шагов внутри каждого этапа, происходит увеличение плотности распределения от этапа к этапу за счет уменьшения зоны поиска, т.е.
где
![]() - плотность распределения пробных шагов
наj-ом этапе
- плотность распределения пробных шагов
наj-ом этапе
 - объем гип – да
на j-ом этапе
- объем гип – да
на j-ом этапе
Иногда пробные шаги целесообразно распределять по нормальному закону распределения.

где
 при 0<q<1
при 0<q<1
Итог: Случайные пробные шаги распределены нормально, со средним значением совпадающим с наилучшей величиной критерия качества из всех проб этапа, а дисперсия уменьшается при неудачных шагах и увеличивается до исходного значения при удачных шагах.
Локально – глобальный поиск коллективом автоматов имени Буша – Мостселлера.
Алгоритм осуществляет шаговый поиск.
![]()
Выбор знака приращения ∆Хiпроизводится адаптивным алгоритмом, причем алгоритм может работать в двух режимах, причем при переходе на локальный режим надо поменять местами параметры адаптации α и β.
Этапы:
1). Обучение.
Обозначим через
![]() -
вероятность выбора положительного
направления поi- ой
координате наN-ом шаге
поиска.
-
вероятность выбора положительного
направления поi- ой
координате наN-ом шаге
поиска.
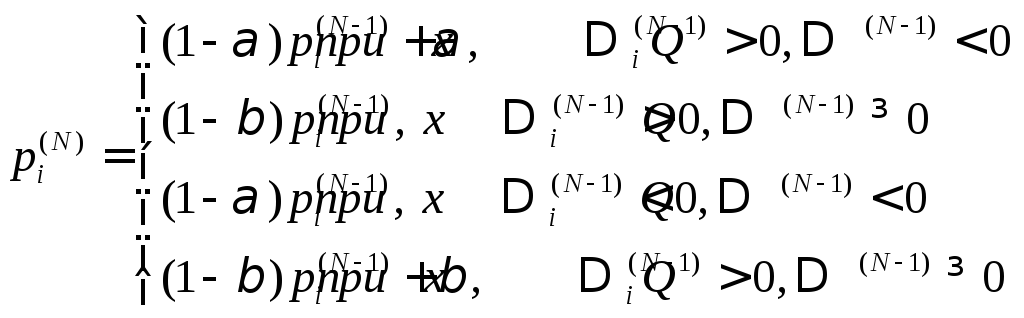 (1)
(1)
Формула показывает как перестраиваются вероятностные характеристики направления движения к экстремуму.
2). Роль соотношений между α и β:
При α>β поиск имеет глобальный характер – это связанно с тем, что скорость разгона при движении вниз больше чем разгона при подъеме.
При α<β происходит локальный поиск, т.е. торможение преобладает над разгоном и движение напоминает затухающие колебания.
При α=β алгоритм не эффективен, т.е. происходит блуждание в точке минимума без уменьшения размеров этой области.
3). Этап алгоритма: поиск вблизи границы области. Если очередной шаг выводит за границы области, то этот шаг не производится, но адаптация происходит.
Для адаптации используется один из следующих способов:
а) Вероятности
обрабатываются по формуле (1) с
соответствующими режимами торможения
![]() .
.
б) Производится отражение
![]() (2)
(2)
Для глобального поиска способ второй предпочтительнее. Для локального оба равны.
4). Использование ∆Q при обратной связи. После каждого очередного шага обучение производится по формулам (1), однако с переменными α и β, сначала задается α(0)и β(0). Как правило это максимальное значение. Задается параметр «забывание» δ(0≤ δ ≤1).
После очередного шага α(N)вычисляется при помощи формул:
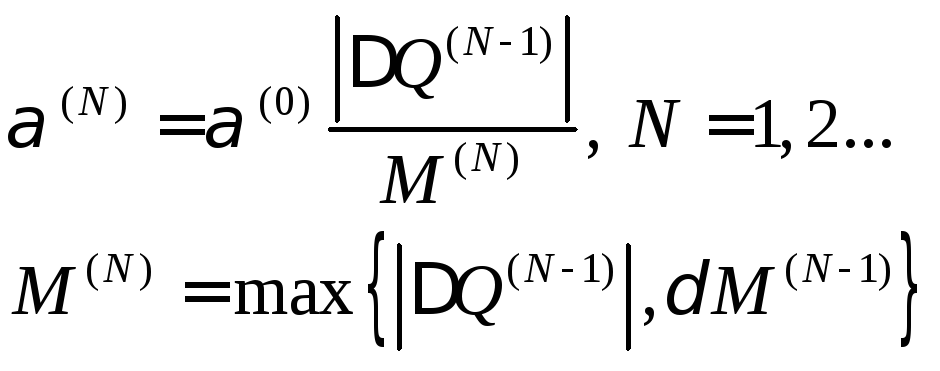 (3)
(3)
Применение этой процедуры делает адаптацию более гибкой. При β=0, α и β=const.
Исходные данные для алгоритма:
n- размерность пространства независимых переменных
![]() -
количество шагов глобального экстремума
-
количество шагов глобального экстремума
k- количество точек, подлежащих локальному уточнению
α и β – параметры адаптации (причем α > β)
γ - коэффициент уменьшения шагов
ε - параметр остановки
![]() -
начальное значение независимых переменных
и начальные шаги по ним
-
начальное значение независимых переменных
и начальные шаги по ним
Алгоритм состоит из этапов:
1. На первых
![]() шагах происходит глобальный поиск из
данной начальной точки
шагах происходит глобальный поиск из
данной начальной точки![]() с шагами
с шагами![]() и с вероятностямиpi=0,5.
и с вероятностямиpi=0,5.
2. В процессе глобального поиска происходит адаптация по формулам, с переменными параметрами, определяемые формулами (3). На границе применяется отражение (2).
3. Результат глобального поиска состоит в определении «k» наилучших точек.
4. После окончания работы глобальной части) производится k– локальных поисков из точек полученного набора, с прежними начальными шагами и начальными вероятностями =0,5.
5. В процессе каждого локального поиска производится адаптация; на границе по формулам (2), внутри области по формулам (1) с параметрами α = α(0)и β= β(0)= начальным.
6. Если при двух последующих двойных подъемах функции качества знаки некоторой переменной были + + - - , - - + +, то шаг по этой переменной умножается на γ.
7. Каждый локальный поиск закончится, когда шаги по всем переменным станут меньше ε.
8. При минимизации текстовой функции
 - многоэкстремальная,
используются следующие параметры
алгоритма:
- многоэкстремальная,
используются следующие параметры
алгоритма:
