§ 3.2. Техническое обеспечение.
Техническое обеспечение или технические средства (ТС) являются физическими носителями процессов ввода, вывода, обработки, визуализации и передачи информации при проектировании посредством инструментов САПР. Техническое обеспечение является наиболее подвижным из всех семи видов обеспечении САПР. Достаточно отметить, что обновление ТС происходит практически через каждые 3—4 года.
Принципы построения САПР, сформулированные в предыдущем параграфе, определяют требования, предъявляемые к ТС:
— применение ТС непосредственно на рабочих местах проектировщиков;
— обеспечение наибольших удобств и наглядности работы проектировщиков, соответствующими инструментами САПР;
— возможность параллельной одновременной работы многих проектировщиков разных категорий над одним проектом;
— эффективность ввода, хранения и отображения проектной информации;
— высокая точность и скорость вычислений;
— совместимость с допустимыми ресурсами проектного предприятия (стоимость помещений, энергоресурсов и т. п.);
— выдача результатов проектирования в виде проектной документации, установленной ЕСКД и ЕСТД формы или непосредственно на технологическое оборудование, в том числе на станки с ЧПУ.
Чтобы удовлетворить этим требованиям, необходимо формировать наборы, комплексы из ТС, включающих центральный вычислительный комплекс (ЭВМ большой и средней мощности), терминальные станции проектировщиков (мини-ЭВМ), терминалы проектировщиков (микроЭВМ, АЦД, ГД, ГП, КГИ, ПА и т. дЛ. ЭВМ большой и средней мощности.
Одноуровневая и двухуровневая структуры ТC не обеспечивают возможности выполнения автономно (на рабочих местах проектировщиков) многих проектных процедур расчета САУ, графических построений их конструкций, работ, связанных с большими объемами вычислений и затратами ресурсов ЭВМ. Непосредственное подключение для этой цели центральной ЭВМ резко снижает производительность совместной работы проектировщиков и приходит в противоречие с рядом принципов организации САПР. Поэтому становится необходимым переход к трехуровневой Наиболее распространенной в настоящее время трехуровневой структурой является структура, второй и третий уровень которой представлен так называемыми автоматизированными рабочими местами (АРМ). АРМ строятся на базе мини-ЭВМ, образующих второй уровень, т. е. терминальные станции проектировщиков (ТСП). Наибольшее распространение в АРМ получили мини-ЭВМ типа CM-4 (CM-1420, CM-1700). В состав таких АРМ на третьем уровне входят терминалы проектировщиков (ТП), а также могут входить персональные ЭВМ (ПЭВМ).
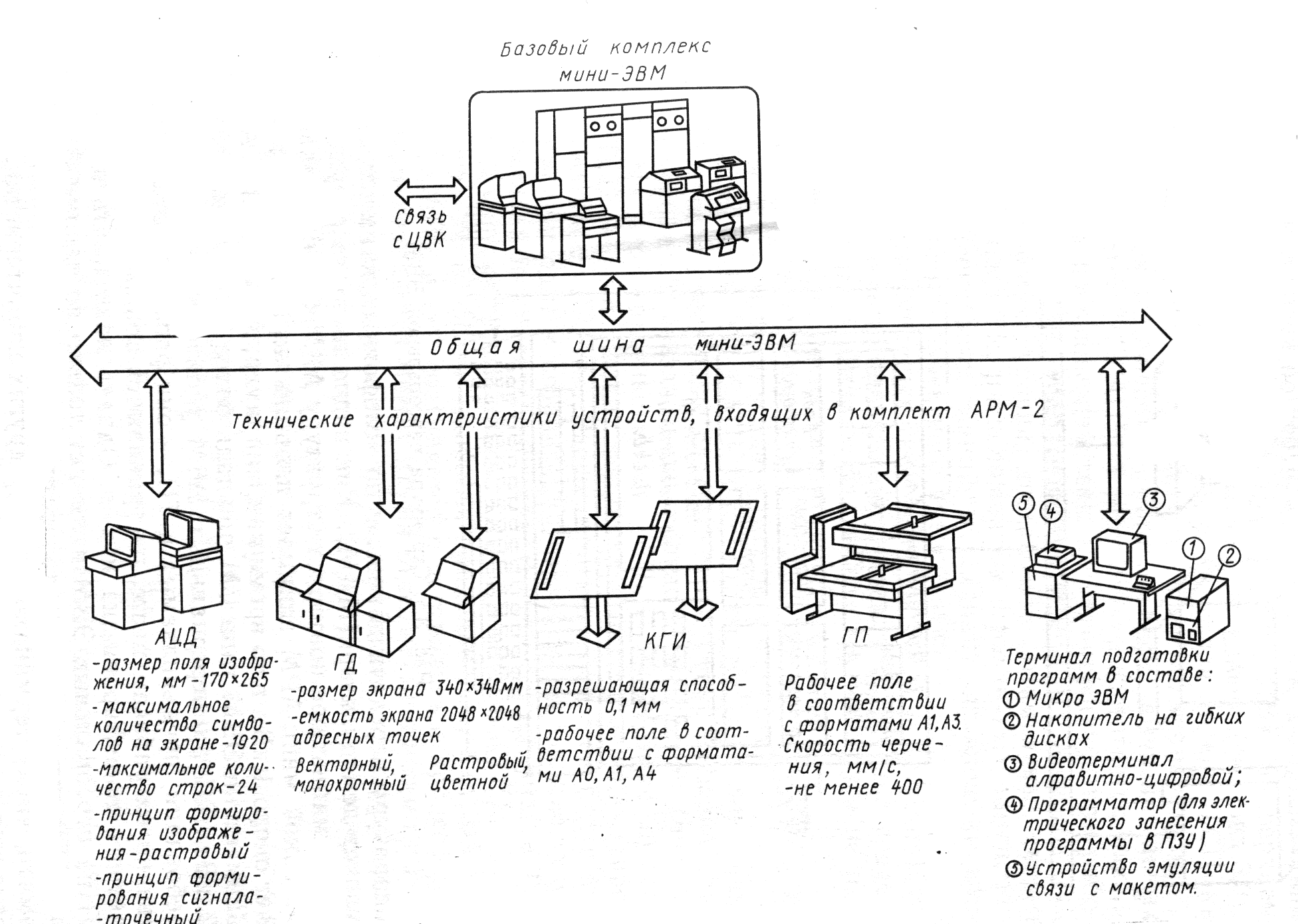
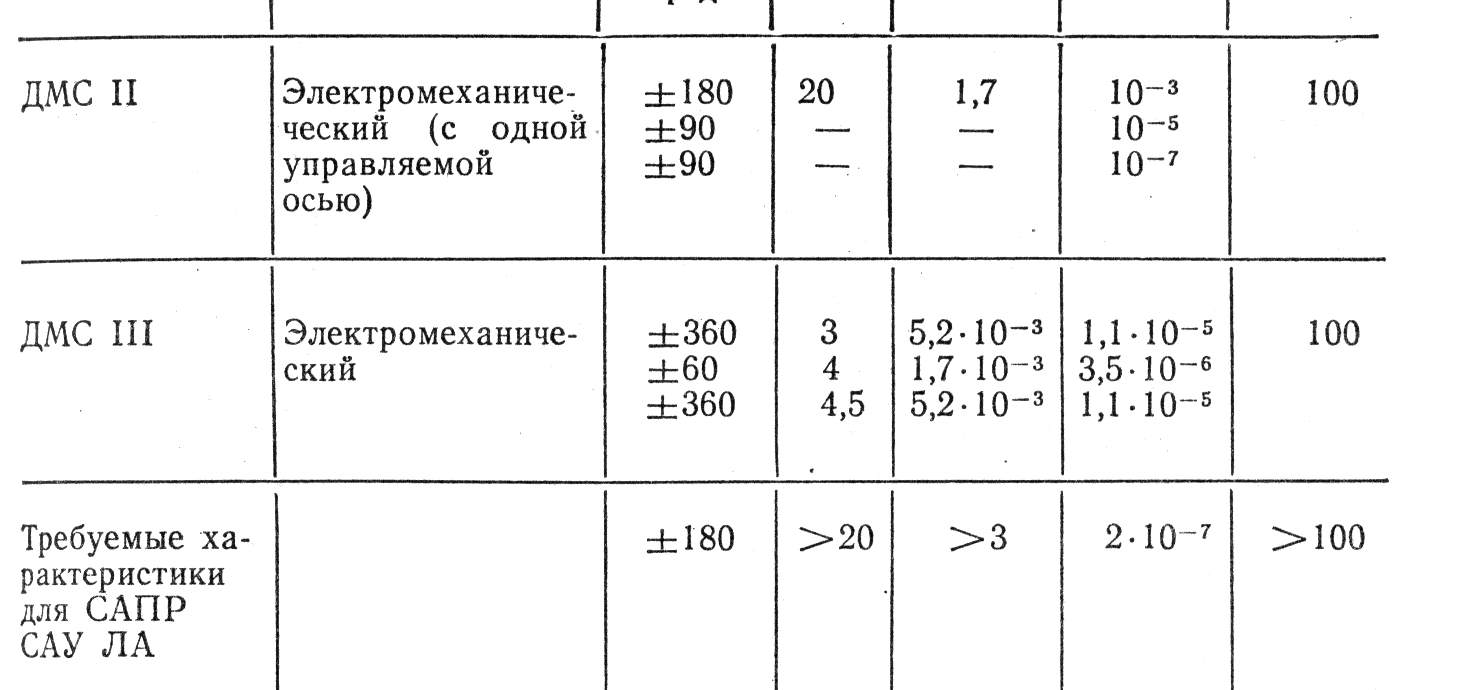
Рис.14 Характеристики АРМ и состав ТП
На рис. 14 представлены состав АРМ и усредненные характеристики терминалов проектировщиков (ГП, КГИ, ГД, ПА), входящих в третий уровень структуры ТС САПР. «Общая шина», представленная на рис. 14, означает физический (аппаратный) канал передачи электрических сигналов между устройствами СМ ЭВМ и ТП. Особое место среди ТП занимают персональные ЭВМ (ПЭВМ). ПЭВМ позволяют проектировщику монополизировать аппаратные и программные ресурсы этих ЭВМ для выполнения конкретных проектных процедур и операций без обращения к более высоким уровням ТСП. Возможность включения АЦД, ГП, ПА в состав ПЭВМ позволяет строить мини-АРМ проектировщика с достаточно широкими возможностями, но при гораздо меньших затратах.
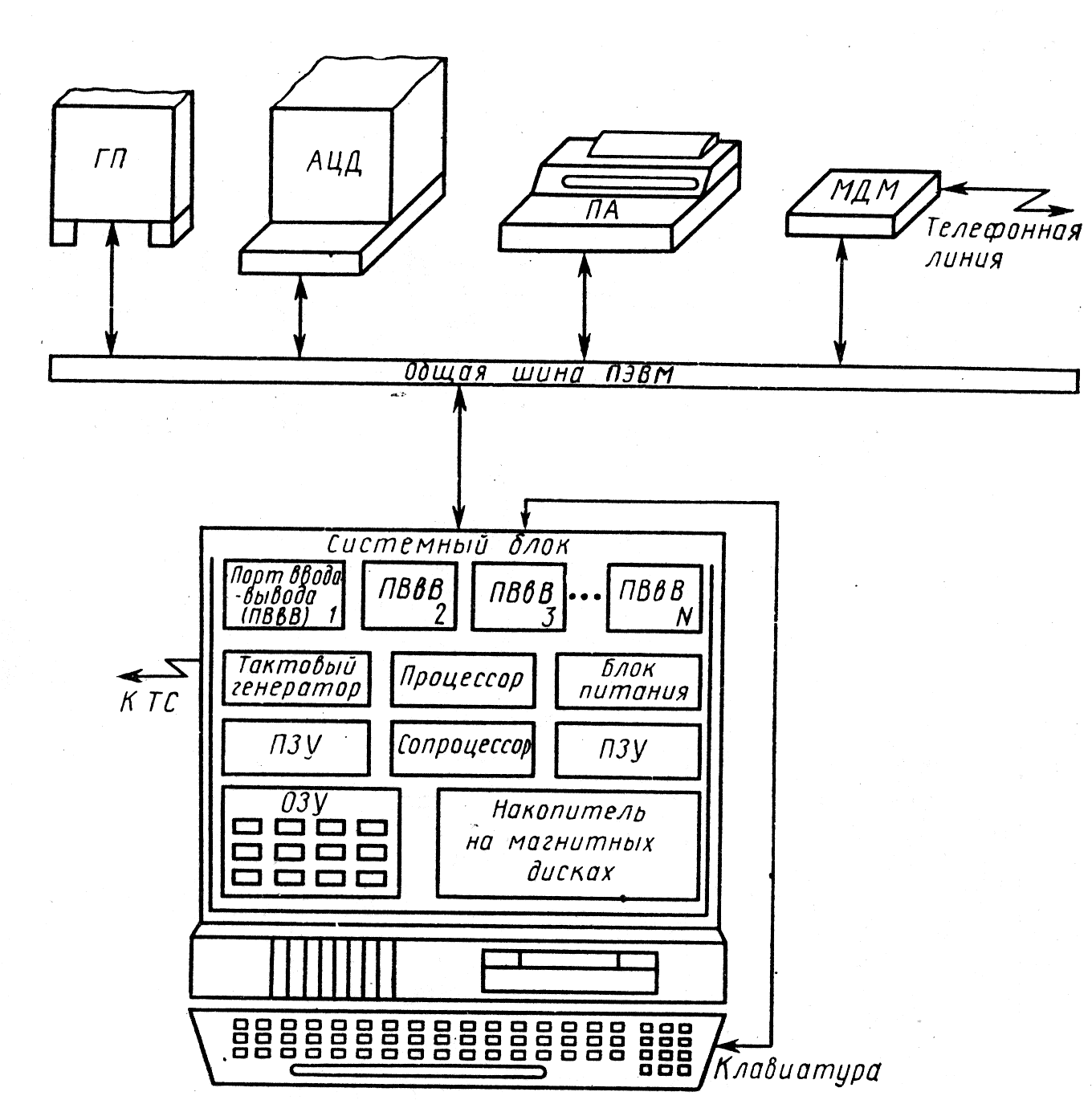
Рис.15. Структура персональной ЭВМ
На рис. 15 показана структура такого мини-АРМ, в том числе устройства связи с ТСП и ЭВМ более высокого уровня через аппаратуру передачи данных и по телефонным каналам через модулятор-демодулятор (МДМ). Как видно из этого рисунка, миниАРМ в миниатюре повторяет структуру АРМ более высокого уровня. Такой мини-АРМ занимает площадь не более 3 м2 и потребляет около 1 кВт, в то время как, например, АРМ2-01 или АРМ2-02 занимает на ЭВМ типа СМ площадь более 20 м2 и потребляет до 12 кВт. ТП на персональных ЭВМ удовлетворяют большинству требований, предъявляемых к ТП, — они располагаются непосредственно на рабочем месте, настраиваются только на задания конкретного проектировщика и т, д. Однако надо иметь в виду, что ТП на персональных ЭВМ включает только по одному АЦД. ГП, ПА, АГД ограничены по точности вычислений, объемам внешней памяти, числу терминалов и ряду других характеристик, что не позволяет пока еще применять их для выполнения ресурсоемких проектных процедур.
При испытаниях САУ эффективным способом остается полунатурное моделирование с помощью динамического моделирующего комплекса (ДМК). В настоящее время методы и средства полунатурного моделирования получили узкоспециальное развитие. Не существует универсальных АВМ, АЦК, ДМС, одинаково пригодных для полунатурного моделирования различных систем. В частности, динамические моделирующие стенды (ДМС) для полунатурного моделирования САУ являются сугубо специальными и требуют особого рассмотрения.
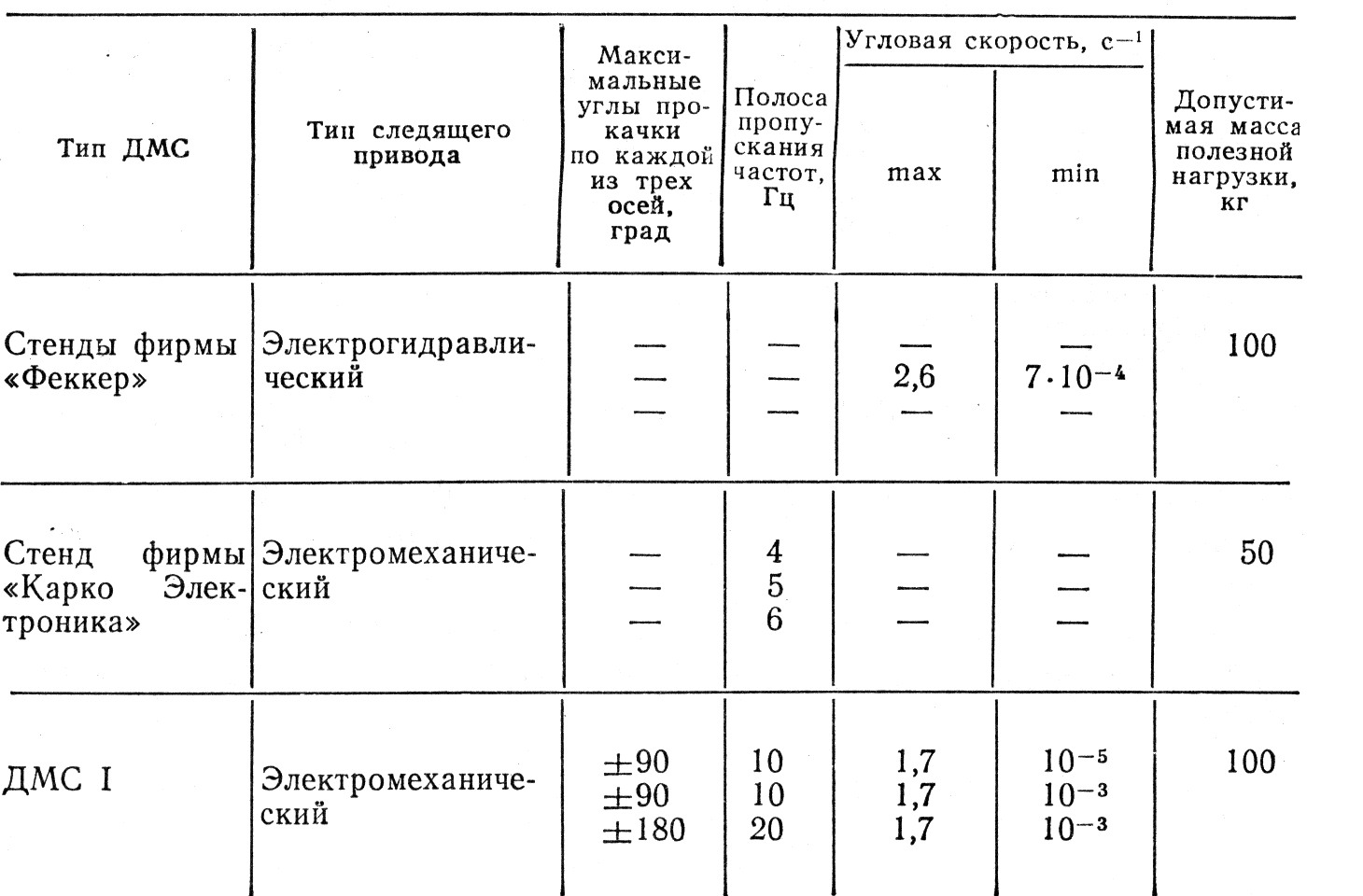
В табл. 3.2 приведены основные технические характеристики ДМС, применяемых в САПР САУ, и требования, предъявляемые к ним при испытаниях САУ. Функционирование АЦД, ГД, ГП, КГИ, ПА, ДМС во многом строится на принципах программно управляемых сложных САР. Элементами этих САР являются типовые ЧЭ, датчики, исполнительные двигатели и т. д. Широко применяются в перечисленных устройствах электронно-оптические и другие преобразователи. Подробное описание структуры, блоков, функционирования перечисленных ТС САПР приведено в отдельных изданиях.
Таблица 3.2 Технические характеристики
трехстепенных моделирующих стендов (ДМС)