

Методы линеаризации уравнений
Существует ряд методов линеаризации уравнений:
Нелинейная функция является аналитической в рабочей области и ее можно разложить в ряд Тейлора:
 (9)
(9)
Сделаем линеаризацию первого уравнения из системы (9) при условии малости приращений относительно положения равновесия или номинального режима, характеризованного этим переменными :
![]() -
отклонения
-
отклонения
y0 ,u0 - номинальный режим
f(y0,u0)=0номинальный режим
 (10)
(10)

 (11)
(11)
y=y0; u=u0

(11’)
y=y0; u=u0
Аналогично и для второго уравнения системы:
 (12)
(12)
Матрицы (11) и (11’) являются матрицами Якоби.
Предполагается, что линейные характеристики не могут быть описаны аналитически, а задаются в графической форме.
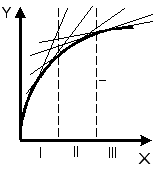
I:k1x+b1 - линейный участок
II:k2x+b2- «колено»
III:k3x+b3– режим насыщения
Вместо определения частных производных (формулы 11 и 11’) вводят переменные в исходные нелинейные уравнения в следующем виде:

Следует помнить,
что
![]() ,
,![]() ,
,![]() являются функциями времени (т.е. не
зависят от времени).
являются функциями времени (т.е. не
зависят от времени).

![]()
![]() -
базисные точки или номинальный режим.
-
базисные точки или номинальный режим.

![]() (13)
(13)
опорное движение
![]() (14)
(14)
4. Основан на определении коэффициентов линейного уравнения (апроксимирующего выражения) по методу наименьших квадратов для функции, задаваемой таблично. Таблицы заполняются в режиме нормальной эксплуатации объекта:

y=f(x1,x2) – зависимость в общем виде, а мы хотели получить:
![]() (15)
(15)
В результате получаются формулы:
 (16)
(16)
 (17)
(17)
Глава 5 моделирование систем автоматического управления
§ 5.1. Методы моделирования и их применение в сапр
Под моделированием какого-либо объекта (явления, системы, устройства, знакового образования) обычно понимается воспроизведение и исследование другого объекта, подобного оригиналу в форме, удобной для исследования, и перенос полученных сведений на моделируемый объект. При этом объекты считаются подобными, если характеристики процессов, происходящих в каком-либо из них, отличаются от соответствующих характеристик другого объекта вполне определенными и постоянными в течение данного процесса коэффициентами. Модель изучаемого явления (объекта) при этом может быть иной физической природы, отличной от природы оригинала. Это обстоятельство открывает широкие возможности для применения моделирования в проектировании, обусловленные привлечением таких эффективных его средств, как ЭВМ, динамические стенды, различного рода имитаторы и тренажеры.
Существуют различные методы моделирования: геометрическое и физическое моделирование, моделирование путем прямых аналогий, математическое моделирование на аналоговых и цифровых вычислительных машинах (АВМ и ЦВМ), полунатурное моделирование.
Каждый из этих методов имеет свои достоинства и недостатки. Применение того или иного метода определяется в каждом конкретном случае в зависимости от исследуемой системы и условий ее работы. При этом необходимо иметь набор правил и условий, выполнение которых обеспечивает требуемую точность изучения заданного объекта по его модели. Эти правила и условия формулируются в теории подобия.
На основе анализа перечисленных методов моделирования в соответствии с требованиями, предъявляемыми к «инструментам САПР» (см. § 1.1), в состав САПР САУ вводятся моделирование на ЭВМ (АВМ и ЦВМ) и полунатурное моделирование. В последнем случае с помощью средств САПР осуществляется не только воспроизведение и исследование объекта, но и управление процессами полунатурного моделирования (применение полунатурного моделирования в составе САПР для проектирования САУ рассматривается в гл. 10).
При математическом моделировании, моделировании на ЭВМ, в качестве объекта моделирования, оригинала, выступают исходные уравнения, представляющие ММ объекта, в качестве модели — процессы, протекающие в соответствии с этими уравнениями и воспроизводимые на ЭВМ в виде «машинных решений» либо аппаратурно (АВМ), либо путем реализации программ (ЦВМ),
Математическое моделирование САУ осуществляется на АВМ и ЦВМ, поэтому часто такие способы называют аналоговым и цифровым моделированием. АВМ применяются в САПР САУ как консольные, терминальные, устройства на рабочих местах разработчиков и испытателей. Управление АВМ осуществляется через терминальные станции центральным процессором в соответствии с общей идеологией построения САПР САУ (см. § 2.1). В дальнейшем будем применять термин ЭВМ, понимая под ним только ЦВМ — основу технических средств САПР.
В математическом моделировании выделяют имитационное моделирование, под которым понимается воспроизведение процессов, объектов, явлений с имитацией случайными величинами и случайными процессами звеньев оригинала, которые не удается представить определенными ММ. Имитационное моделирование рассматривают так же, как управляемый эксперимент, производимый на ЭВМ. В таком эксперименте определенные математическими моделями части объекта моделирования взаимодействуют с имитирующими возмущающие воздействия и некоторые звенья САУ генераторами случайных величин. Это взаимодействие проводится по определенным в эксперименте правилам, а результаты моделирования подвергаются статистической обработке. Так, при моделировании ЛА по полной ММ, представленной на рис. 4.5, воздействие на него со стороны других внешних факторов мирового пространства — атмосферы, звезд, полярного сияния, космической пыли — имитируется генераторами случайных величин и процессов, а обработка результатов моделирования проводится на ЭВМ по специальной программе (см. гл. 6).
Под полунатурным моделированием (моделированием с реальной аппаратурой) понимают исследование элементов реальной аппаратуры совместно с моделью остальной части системы, реализованной на ЭВМ.
Применение такого метода моделирования становится необходимым в тех случаях, когда не удается описать работу некоторых элементов системы математически.
При полунатурном моделировании систем управления подвижных объектов возникает необходимость моделирования в натуральном масштабе времени движения устройств САУ с целью влияния их кинематики и динамики на работу САУ в целом, причем ряд элементов этой САУ не поддается математическому описанию и реализуется аппаратурно.
В этой главе излагается математическое моделирование как один из инструментов САПР. Этот инструмент включает в себя соответствующие компоненты основных обеспечении САПР и служит для воспроизведения и исследования САУ и их устройств на ЭВМ с целью эффективной замены макетирования на всех этапах проектирования САУ. Так, математическое моделирование динамики САУ позволяет значительно уменьшить объемы макетных испытаний и осуществить:
решение, таких проектных задач, как анализ функционирования САУ, их устройств и элементов;
исследование влияния изменения параметров и возмущающих воздействий на стабильность характеристик САУ, выбор структурной схемы САУ по задаваемым проектировщиком критериям;
оценки устойчивости, динамических и статических ошибок для различных значений параметров выбранной структурной схемы и возмущающих воздействий.
Основное требование к подсистеме моделирования САПР САУ — создание более эффективного по отношению к макетированию инструмента для решения перечисленных проектных задач.