

§ 3.3. Математическое обеспечение
Математическое обеспечение САПР включает в себя математические модели объектов проектирования, методы и алгоритмы.
Раскроем понятия, введенные в этом определении. Математическая модель — это система математических соотношений: аналитических в виде уравнений, графических в виде структурных схем или графов, табличных в виде таблиц, описывающих изучаемый процесс или явление.
Метод (греч. methodos) — путь исследования решения задачи, включающий в себя совокупность теории и приемов, содержащих логику и обоснование решения задачи. Из метода решения вытекают алгоритмы.
Слово «алгоритм» (лат. algorithm} от арабской интерпретации имени узбекского математика IX в. Аль-Хорезми) означает совокупность правил, определяющих процедуру решения задачи по заданным исходным данным, которая заканчивается результатом, решением.
В САПР САУ математические модели являются необходимой составляющей для осуществления проектных процедур, состоящих во взаимодействии множеств М, О, К (см. ранее). ММ в большей степени определяют наиболее важные характеристики САПР САУ — время проектирования с помощью САПР, объем технических средств и обеспечении САПР, качество проектирования.
Математические модели САУ можно классифицировать по степени детализации САУ как сложной системы в соответствии с трехуровневой иерархической схемой, представленной на рис. 16 а. Тогда выделяются следующие три уровня ММ:
ММ всей САУ как сложной системы Р;
ММ устройств САУ как отдельных систем а i
ММ элементов этих устройств как подсистем Вij.
На рис. 16, б для иллюстрации такой иерархии ММ показаны уровни и соответствующие формы ММ: для САУ ЛА, например, гиростабилизатора (см. рис. 7 пример 2.2) и чувствительного элемента гиростабилизатора — гироблока с гироскопом на «газовом подвесе».
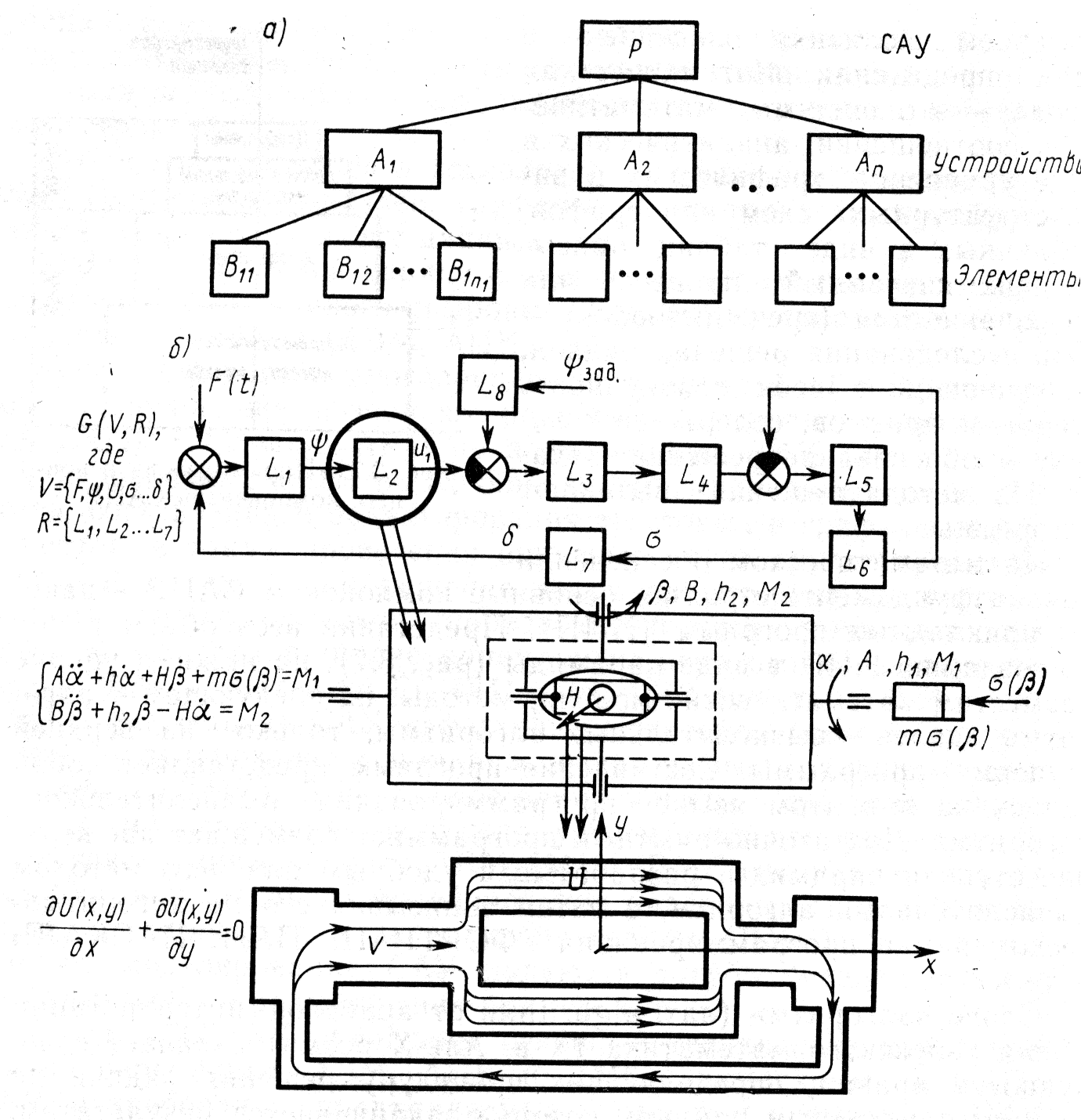
Рис.16. Уровни классификации математических моделей САУ
а – иерархическая модель, б – модель структуры, устройства и элемента
На самом верхнем уровне наибольшее распространение в теории САУ получили ММ в виде структурных схем и графов G(V, R). Структурной схемой САУ называют ее графическое изображение в виде соединений звеньев. Звено обычно изображают в виде прямоугольника с указанием оператора, связывающего входные и выходные сигналы. Такими операторами являются (на рис. 16, а они обозначены L1—L7 в соответствии с устройствами САУ ЛА) передаточные функции, дифференциальные и другие уравнения звеньев. Сравнивающие и суммирующие элементы структурной схемы отображают в виде круга. Полагая, что читатель достаточно осведомлен о правилах преобразования структурных схем САУ, представим рис. 17, а, б, на котором после выполнения соответствующих элементарных преобразований построены структурные схемы, соответствующие САУ ЛА по углу тангажа θ (на рис. 17, а Т1 = Т2 = 1) и САР ТГ с указанием простейших математических моделей отдельных устройств — передаточных функций. На рис. 17, б отдельные звенья соответствуют САР ТГ, описание которой приведено в примере (см. номера звеньев на рис. 1 и 17, б). Причем рассмотрены два канала этой САР: регулирование частоты вращения турбины (РЧВ) и регулирование давления пара (РДП). Из математических моделей, представленных на рис. 17 в виде структурных схем, видно, что они могут не соответствовать «естественному» разделению звеньев. Некоторые естественные звенья «математически» объединяются в одно, а другие, наоборот, разделяются. Так, устройства ТГ 4, 4' раскрыты более подробно. Это делается для удобства дальнейших исследований САУ уже по ее ММ, т. е. по некоторому абстрактному образу этой САУ. На основании структурных схем возможно построение алгоритмов, анализа и синтеза САУ с дальнейшей их программной реализацией на ЭВМ. При построении соответствующих инструментов САПР потребуется специальный проблемно-ориентированный язык разработчика САУ, на котором он будет производить необходимые операции со структурными схемами — определение передаточных функций разомкнутой и замкнутой цепей, преобразование многоконтурной цепи к одноконтурной, предварительные расчеты САУ. На основе структурных схем проводится исследование САУ в целом: формируются ее облик и функциональная схема, осуществляется выбор устройств.
Удобным для исследования отображением структурных схем САУ являются ориентированные графы, которые применительно к САУ обладают следующими свойствами:
— дуги графа изображают звено и характеризуются оператором этого звена — передаточная функция, уравнения звена;
— каждой вершине ставится в соответствие одна из переменных, и в соответствии с правилами работы с графами вершина, к которой подходит одна или несколько дуг, соответствует переменной, равной выходу одной дуги или сумме выходов дуг. Если из вершины исходит несколько дуг, то входная величина для всех этих дуг одна и та же.
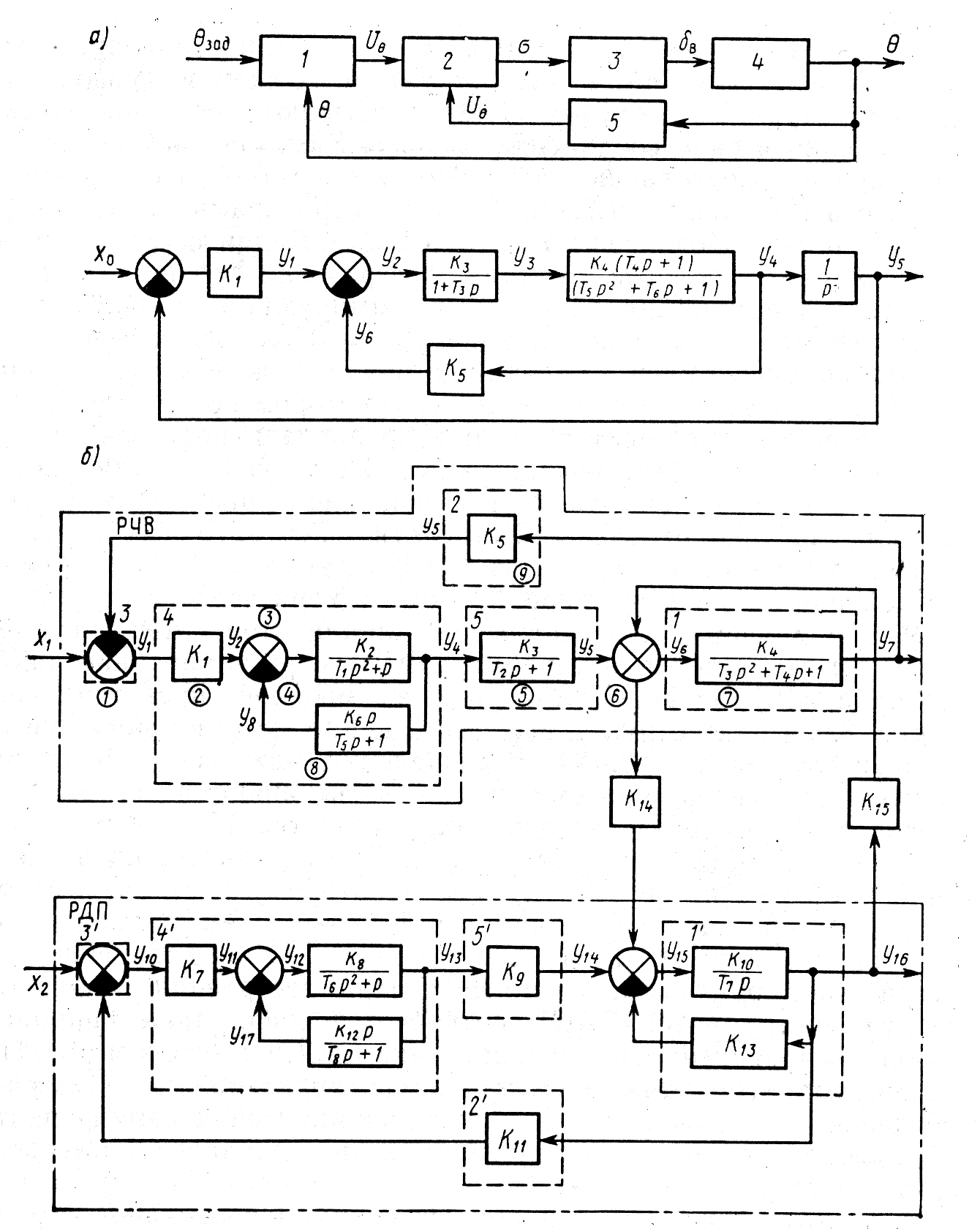
Рис. 17. Структурные модели САУ:
а — структурные модели САУ летательного аппарата; 1 — датчик угла тангажа; 2 — усилитель;
3 - рулевая машина руля высоты; 4 — планер, корпус самолета; 5 — датчик угловой скорости;
б — структурные модели САУ турбогенератора
На рис. 18 показаны графы, построенные по структурным схемам САУ, приведенным на рис. 17. Правила работы с графами во многом сходны с правилами преобразований структурных схем. Так, простой путь на графе, если нет не принадлежащих ему дуг, можно заменить одной дугой с передаточной функцией, равной произведению передаточных функций дуг этого пути. Параллельные дуги можно заменить одной дугой, равной сумме передаточных функций этих дуг.
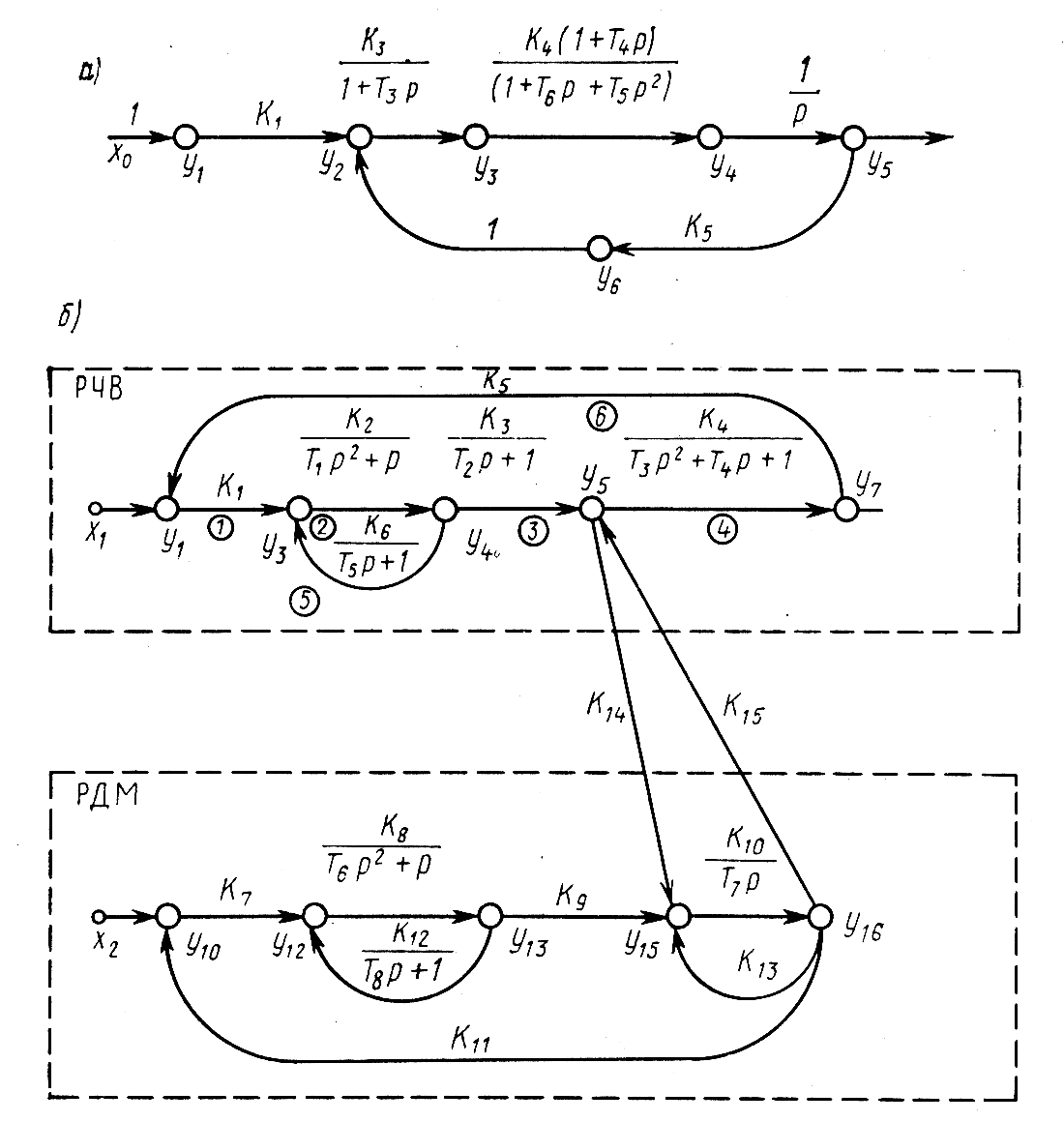
Рис. 18. Графы САУ самолета и турбогенератора
Определение передаточной функции САУ по ее графу можно выполнить пользуясь формулой Мейсона [16]:
![]() (3.6)
(3.6)
где Wi — передаточная функция i-го простого пути от вершины yi к вершине уk, равная произведению передаточных функций, входящих в этот путь; т — общее число таких путей; Δ — определитель графа;
![]()
где Wj(1) — передаточная функция j-го контура; N — количество контуров; Wj(2) — произведение передаточных функций, не касающихся, т. е. не имеющих общих дуг и вершин пар контуров; Wj(3) — произведение передаточных функций, не касающихся троек контуров, и т. д.; Δi— определитель подграфа, получающийся из исходного графа при удалении дуг и вершин i-го простого пути, а также всех дуг, инцидентных этим вершинам.
Перейдем теперь к «раскрытию содержания» операторов математических моделей описания САУ верхнего структурного уровня, т. е. к ММ устройств САУ (второй уровень иерархии ММ САУ, рис. 16, а).
Общепринятой формой ММ многих устройств САУ, а также объектов управления являются обыкновенные дифференциальные уравнения, в общем случае нелинейные, стохастические, с запаздывающим аргументом. Из этих уравнений как частные случаи получают линейные алгебраические, дифференциальные и другие уравнения.
Так, на рис.16, б приведены линейные дифференциальные уравнения гиростабилизатора с традиционными обозначениями: А, В — моменты инерции; h1, h2— коэффициенты вязкого трения; H— кинетический момент гироскопа; α, β — углы стабилизации и прецессии.
В общем случае ММ устройств САУ можно представить в виде системы из обобщенных стохастических обыкновенных дифференциальных уравнений второго порядка:
![]() (3.7)
(3.7)
где при t=0, Y(0), Y’(0) —векторы из начальных условий случайных величин, f принадлежит отрезку [0, T]; F* — вещественная нелинейная вектор-функция своих аргументов; F*= (F1*, F2*, ...,Fn1*)' ; Y=(y1,... ...,yn)' ; Y, Y’, Y’’— векторы из фазовых координат и их производных 1-го и 2-го порядков — случайных функций времени; Х= = (x1,... ,хn)' — вектор из возмущающих воздействий на систему— случайных функций времени; U= (u1, ...,ип)' — вектор из управляющих воздействий на объект управления — случайных функций времени. Такие уравнения обычно выводятся с помощью классических способов аналитической динамики (см. гл. 4).
Управляющие воздействия часто формируются в виде отдельных дифференциальных уравнений, связывающих векторы X, Y и U и их производные:
![]() (3.8)
(3.8)
где U(0), U’(0)—начальные условия; Ф* — вещественная нелинейная вектор-функция своих аргументов порядка n3; R= (r1, r2,...,rn)—вектор из коэффициентов, устанавливаемых при формировании управлений; Δλ= (λ1,... , λn4)—вектор параметров — случайных величин. Параметрами ММ САУ будем считать составляющие коэффициентов дифференциальных уравнений, несущие определенный физический смысл (например, моменты инерции, коэффициенты усиления, постоянные времени).
В дополнение к перечисленным составляющим системы (3.7) будем считать заданными вероятностные характеристики случайных функций X(t) и случайных величин Y0, Y’0, U0, U’o, Δ, R, ξx[X(t)], ξ YO(Yo), ξ Y’O(Y’o), ξ (U0), ξ (U’0),, ξλ (λ),. которые в частных случаях выражают математические ожидания, дисперсии, плотности распределения вероятностей случайных величин
Система (3.7), (3.8) является достаточно общей, и из нее можно получить обычно распространенные формы ММ устройств САУ как частные случаи.
Рассматривая промежутки времени tk—tk-1 принадлежит промежутку [0, Т], на которых случайные функции времени и случайные величины в (3.7), (3.8) можно заменить их математическим ожиданием (в дальнейшем для простоты будем рассматривать только уравнение (3.7)), систему (3.7) можно разбить на S подсистем с детерминированными аргументами функции F*:
![]() (3.9)
(3.9)
Положим для простоты дальнейшего изложения Fk* = F и приведем эту систему к нормальной форме. Для этого необходимо осуществить замену переменных и разрешить систему (3.9) относительно старшей производнойY’’. Тогда получимнормальную форму нелинейных обыкновенных дифференциальных уравнений
![]() (3.10)
(3.10)
с начальными условиями Y(0), где Y= (y1 ..., уп1,), Х= (х1, ...,хn2), U=(u1,...,un3), Λ= (λ1,... , λn4) F=(F1,...,Fn1) —соответствующие (3.10) векторы, n1 = 2nl. Система дифференциальных уравнений в форме (3.10) называется системой в форме Коши (А. Л. Коши — французский математик, 1789—1857). При дальнейшем упрощении уравнений (3.10) правые части в (3.10) заменяются на приближенные выражения
![]()
получаемые после линеаризации нелинейностей fj относительно установившихся значений переменных Y0, X0. При этом осуществляется известная замена Y=Y0+ΔY, Х=Х0+ΔХ, где Y0, X0— установившиеся программные значения переменных, известные функции времени или постоянные величины, а. ΔY, ΔХ — малые отклонения в процессе движения. После такого упрощения получим распространенную форму — линейные обыкновенные дифференциальные уравнения с постоянными или переменными во времени коэффициентами
 (3.11)
(3.11)
где А*, В*, А**, В** — матрицы из коэффициентов аij, Ьij.
В некоторых случаях при описании САУ и их устройств применяется форма ММ вида
![]() (3.12)
(3.12)
и происходящие от нее линейные относительно y1,...,y1(n) MM
 (3.13)
(3.13)
![]() (3.14)
(3.14)
где Х(m), Х(m-1)>... — производные порядка т, т—1, ... от вектора X; a1(t),..., an(t), a1,...,an— переменные во времени и постоянные коэффициенты; u1—управляющее воздействие по координате у1.
Такие ММ используются в том случае, когда при исследовании требуется определить процессы только по одной координате, в данном случае y1(t), а все остальные составляющие вектора Y— — (y2(t), … ,yп(t)) интереса не представляют.
Для удобства исследования устройств и САУ в целом на ЭВМ систему (3.7), (3.8) после линеаризации, аналогичной (3.11), представляют в форме
 (3.15)
(3.15)
где Z — вектор из координат «внутренних» состояний системы; U — вектор управляющих воздействий; Y — вектор «выходных координат»;
![]()
К=(kji)n2m, С= (сji)т, т — прямоугольные матрицы коэффициентов при векторах Z, U, возмущающих воздействиях X, коэффициентов, формирующих законы управления САУ и связи векторов Y, Z. Как правило, рассматриваются случаи, когда матрицы А, В, С, D, V, К содержат только постоянные элементы. Уравнения (3.15) получили распространение под названием формы пространства состояний.
Если функции Y(t), U (t) и их производные, входящие в формы (3.7) — (3.15), в принципе имеют запаздывание Y(t—τ), U(t—τ), то эти уравнения будут уравнениями с запаздывающим аргументом, отображающими, в частности, динамику гидравлических, пневматических и микропроцессорных элементов САУ.
Модели (3.7) — (3.15) служат основой для построения операторов L в ММ высокого ранга (см. рис. 16). В частности, из дифференциальных уравнений (3.15) получим
![]() (3.16)
(3.16)
В этом операторном уравнении вектора Y, U, X те же, что и в (3.15), a L(p), G(p), R(p) —операторы из полиноминальных матриц вида

Из (3.16) в простейшем случае можно получить скалярное уравнение
 (3.17)
(3.17)
т. е. передаточную функцию — известный в теории САУ оператор.
Нелинейные дифференциальные уравнения также могут быть представлены в операторной форме. Так, уравнение- (3.10) представляется в операторной форме на основе разложения выходной координаты Y в ряды Вольтерра. Для одномерного случая переменной yi и воздействий Uj ,xj такое разложение после объединения Uj(t) и xj(t) в одно возмущающее воздействие xj*(t) имеет вид
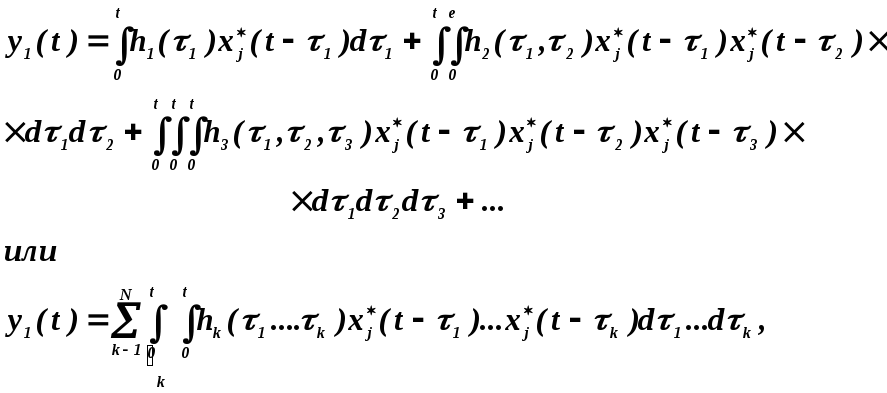 (3.18)
(3.18)
где hk(τ 1, …, τ k) —обобщенные весовые функции исследуемой не линейной системы, получаемые после приведения исходного уравнения (3.10) к интегральной форме
![]()
применения к этой форме разложения Вольтера;

— значения входного сигнала, отстоящего (запаздывающего) от момента времени t на величину τ i
Формы ММ (3.7) — (3.18) являются достаточно общими для отображения различных устройств САУ. ММ непрерывных процессов в САУ и их устройствах описываются уравнениями (3.7) — (3.18) без каких-либо изменений. ММ дискретных устройств САУ получаются из уравнений (3.7) — (3.18) как частный случай, когда функции в них определены только при tn=nT, где Т — такт дискретности по времени, а п=0, 1, 2,....
В отличие от непрерывных ММ дискретные модели устанавливают соотношения между решетчатыми функциями
![]() (3.19)
(3.19)
значения которых могут быть определены не в любой момент времени. Для решетчатых функций вводятся понятия квантования по времени (Т) и квантования по уровню (Δ). ММ дискретных систем представляются в форме разностных уравнений. Переход от исходных дифференциальных уравнений к эквивалентным разностным можно сделать не единственным способом. В частности, полагая, в уравнениях (3.10)

получим обобщенные разностные уравнения в векторной форме:
![]() (3.20)
(3.20)
Напомним, что в общем случае разностное уравнение n-го порядка записывается при Т=1 в виде
![]() (3.21)
(3.21)
где под конечной разностью Δy(n) понимается выражение
Раскрывая эти выражения получим
 (3.22)
(3.22)
После подстановки (3.22) в (3.21) приходим к разностному уравнению k-то порядка в форме
![]() (3.23)
(3.23)
Если это уравнение удается представить в виде
![]()
то, очевидно, задав начальные значения при n=0, y(0), y(1),..., y(k—1), мы получим у k и вообще уп при любом целом п.
Уравнение (3.23) представляет собой разностный аналог формы Коши (3.10) и позволяет рекуррентно (последующее значение у(п) через предыдущее) вычислить все интересующие значения y(п).
Возвращаясь к форме представления САУ в «пространстве состояний» (3.15), представим ее в конечно-разностном виде (3.23) другим способом. Решение первого уравнения из системы (3.15), можно записать в известной форме

Положим в этом уравнении to = nT, t—(n+1)T и рассмотрим промежуток времени nT<τ<(п+1)Т. Будем также считать, что Z0=Z(nT), U(τ) = U(nT), Х(τ)=Х(nT). Тогда вместо (3.24), получим
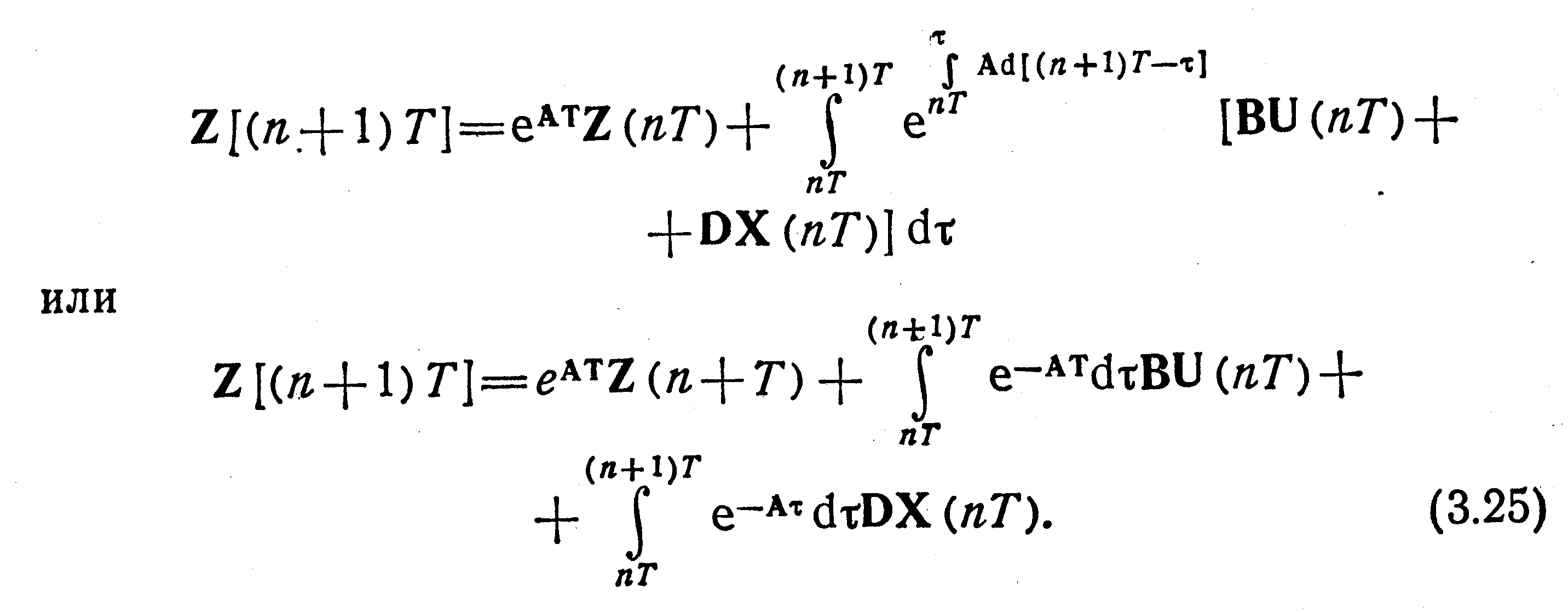
Аналогично приводится к разностной форме второе уравнение системы (3.15), а третье уравнение примет вид Y(nT)=GZ(nT). ММ в форме (3.25) применяется при исследовании как непрерывных, так и дискретных САУ и ее устройств.
Разностные уравнения, аналогично формам (3.17), (3.18), можно представить в операторной форме. Так, если в уравнении (3.25) обозначить

и ввести оператор сдвига 2=еTр, где р — оператор Лапласа, на основании известной в теории операционного исчисления теоремы упреждения, то получим операторное уравнение в виде

Из (3.26) в простейшем случае можно получить скалярное уравнение
 (3.27)
(3.27)
z — передаточную функцию — известный в теории САУ оператор, широко применяемый для анализа дискретных систем.
Таким образом, ММ (3.7) — (3.27) могут служить для решения задач в процессе проектирования устройств, соответствующих различным классам САУ: стохастическим и детерминированным, нелинейным и линейным, нестационарным и стационарным, непрерывным и дискретным.
ЭлементыСАУ при первоначальном их получении описываются ММ на уровне представления физических явлений. Многообразие физических явлений, лежащих в основе многих элементов САУ, затрудняет построение каких-либо общих их ММ, поэтому рассмотрим некоторые типовые ММ, соответствующие частным случаям обобщенного дифференциального уравнения в частных производных второго порядка:

где а(х, у), b(х, у), с(х, у), d(x, у), е(х, у), g(x, у) — коэффициенты; f(x, у)—свободный член уравнения. Эти функции от независимых переменных x, у заданы в области D ограниченной контуром Г; и=и(х, у) —искомая функция, которая может быть напряжением механического элемента, потоком газа или жидкости в пневматическом и гидравлическом элементах САУ. Уравнение (3.28) называют эллиптическим, параболическим и гиперболическим в зависимости от условий R(x, y)<0, R(x, y)=0, R(x, y)>0 для всех х, y принадлежащих области D. При этом R(x, у)=b2(х, у)—а(х, у). В зависимости от типа уравнений задаются начальные и граничные условия, связанные с этими уравнениями.
Так, эллиптическое уравнение (уравнение Пуассона)
![]()
при известных граничных условиях может являться ММ механического вала турбогенератора, оси карданова подвеса ГСП, звена ноги ШР, вала привода рулевых исполнительных элементов ЛА. По этой модели определяется функция и(х, у), задающая моменты упругих сил, которые в дальнейшем учитываются в уравнениях (3.7) — (3.18) динамики всего устройства САУ в целом. Параболическое уравнение в простейшем случае для однокоординатной системы
![]()
применяется при расчетах распространения теплоты в одномерных элементах механических устройств САУ. При этом требуется найти U(x, t)—распространение температуры в зависимости от расположения источника тепла f(x, t) по отношению к измеряемой точке оси х в заданные моменты времени t. Гиперболическое уравнение (волновое уравнение)
![]()
применяется при расчетах пневматических и гидравлических элементов САУ. В частности, распространение потока, обтекающего элементы корпуса ЛА, расчет давления газа в чувствительном элементе ГСП (см. рис. 16, б), расчет давления пара в ТГ проводятся по ММ (3.31), а результаты расчета в виде функции и(х, у) используются в уравнениях (3.7) — (3.18) динамики соответствующих устройств САУ как возмущающие воздействия на систему— составляющие вектора X(t).
Вообще говоря, уравнения (3.28) являются более общими, чем (3.7) —(3.23). Из них можно получить обыкновенные дифференциальные и разностные уравнения как частные случаи. Однако последние используются на более высоком уровне иерархии ММ именно в силу своего большего «абстрагирования» от физики процессов в элементах.
При исследовании «собственно» дискретных элементов САУ (релейные, импульсные, элементы микропроцессоров) понятие «состояние» физически связано с «внутренним миром» этих элементов. Различают однотактные и многотактные дискретные элементы. В однотактных — элементах без памяти — совокупность выходных сигналов Y(nT) (n=0, N) представляет собой однозначную функцию входных сигналов Х(пТ) для того же момента времени, т. е. Y(пТ) =Ф[X(пТ)]. В многотактных — элементах с памятью — выходные сигналы зависят в данный момент времени t=nT не только от входных сигналов в тот же момент х(пТ), но и от состояния внутренних составляющих дискретного элемента z(n) в предыдущие моменты времени:
![]()
Однотактные дискретные устройства и элементы САУ описываются булевыми функциями f (x1,... ,хп), где х1,...,хп принимают значения из множества {0, 1}. Имеется точно 22n булевых функций от п переменных.
С помощью булевых функций однозначно определяется выходной сигнал дискретного устройства при заданных входных.
Многотактные дискретные устройства описываются математическими моделями на основе конечных автоматов. Конечный автомат характеризуется тремя множествами: входным алфавитом X; множеством входных дискретных сигналов; выходным алфавитом Y — множеством внутренних состояний Z. Функционирование конечного автомата описывается двумя функциями: функцией перехода в новое состояние δ и функцией выходов λ, т. е.
![]() (3.32)
(3.32)
Если
![]() то вместо (3.32) получим
то вместо (3.32) получим
![]() (3.32*)
(3.32*)
Выражения (3.32) определяют работу автомата Мили, а (3.32*) определяют автомат Мура.
С помощью автоматов Мили и Мура и таблиц переходов между элементами дискретной системы составляются ММ элементов таких устройств САУ, как БЦВМ в ЛА, микропроцессорные системы регулирования в ГСП, регуляторы на микропроцессорах для роботов, турбин и др. С помощью ММ (3.28) — (3.32) определяются коэффициенты и параметры уравнений устройств (3.7) — (3.27), т. е. ММ более высокого уровня.
Перейдем к математическим методам и алгоритмам как компонентам математического обеспечения САПР САУ. Поскольку подробное рассмотрение методов и алгоритмов как компонентов соответствующих инструментов САПР будет дано в последующих главах при изложении конкретных подсистем САПР САУ, здесь мы рассмотрим классификацию, качественный состав методов и алгоритмов, а также остановимся на особенностях построения вычислительных алгоритмов в математическом обеспечении САПР САУ. Одним из возможных подходов к классификации таких методов является их разбиение на машинно-ориентированные эвристические и классические методы теории САУ, «чисто» машинные и машинно-аналитические.
Попробуем раскрыть содержание каждого из этих методов При общих исследованиях САУ задача часто оказывается настолько неопределенной, что приходится пользоваться эвристическими методами (ЭМ). ЭМ — это такие методы, которые основаны на интуиции и опыте разработчика САУ.
В настоящее время ЭМ получили развитие благодаря внедрению диалоговых режимов работы «человек — ЭВМ», развитию методов по распознаванию образов, методов факторного эксперимента и т. д. Структурно ЭМ функционируют по схеме, представленной на рис. 20, а.
При проектировании сложных САУ приходится иметь дело с тремя категориями условий и исходных данных при решении задач: определенно-детерминированными, определенно-вероятностными, неопределенными. В третьем случае имеются лишь некоторые сведения о возможных законах распределения или об интервале возможных значений характеристик и параметров САУ. В этом случае единственно возможным оказывается эвристический подход, который, несмотря на неопределенность исходных данных и условий, позволяет на основе опыта, интуиции и экспертных оценок принимать решения при проектировании САУ. Машинная ориентация такого эвристического подхода сводится к построению алгоритма, который бы сочетал интуицию, опыт и эвристики человека с возможностью быстрой проверки на ЭВМ.
Классические методы созданы для анализа устойчивости качества и точности САУ и ее устройств, решения задач синтеза регуляторов САУ и корректирующих устройств. Классические методы исследования и расчета САУ изложены в многочисленных работах по теории САУ и, как правило, представляют собой скалярные методы, предназначенные для простых систем невысокого порядка. Такой подход вполне оправдан тем, что при отсутствии ЭВМ проектирование САУ осуществлялось путем приближенных теоретических расчетов в сочетании с макетированием и испытаниями, которые составляли, да и сейчас еще составляют наибольшую часть инструментария проектировщика.


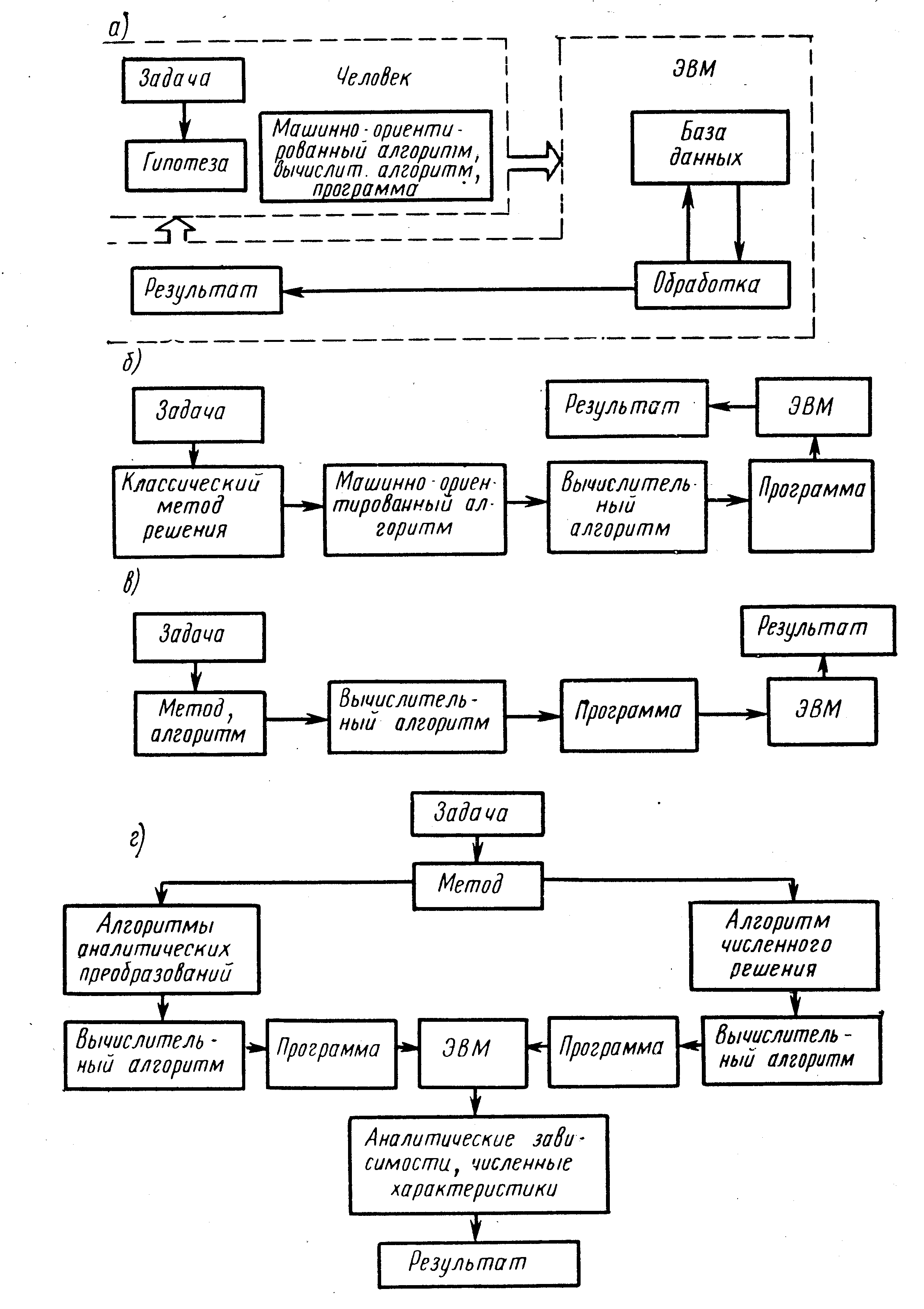
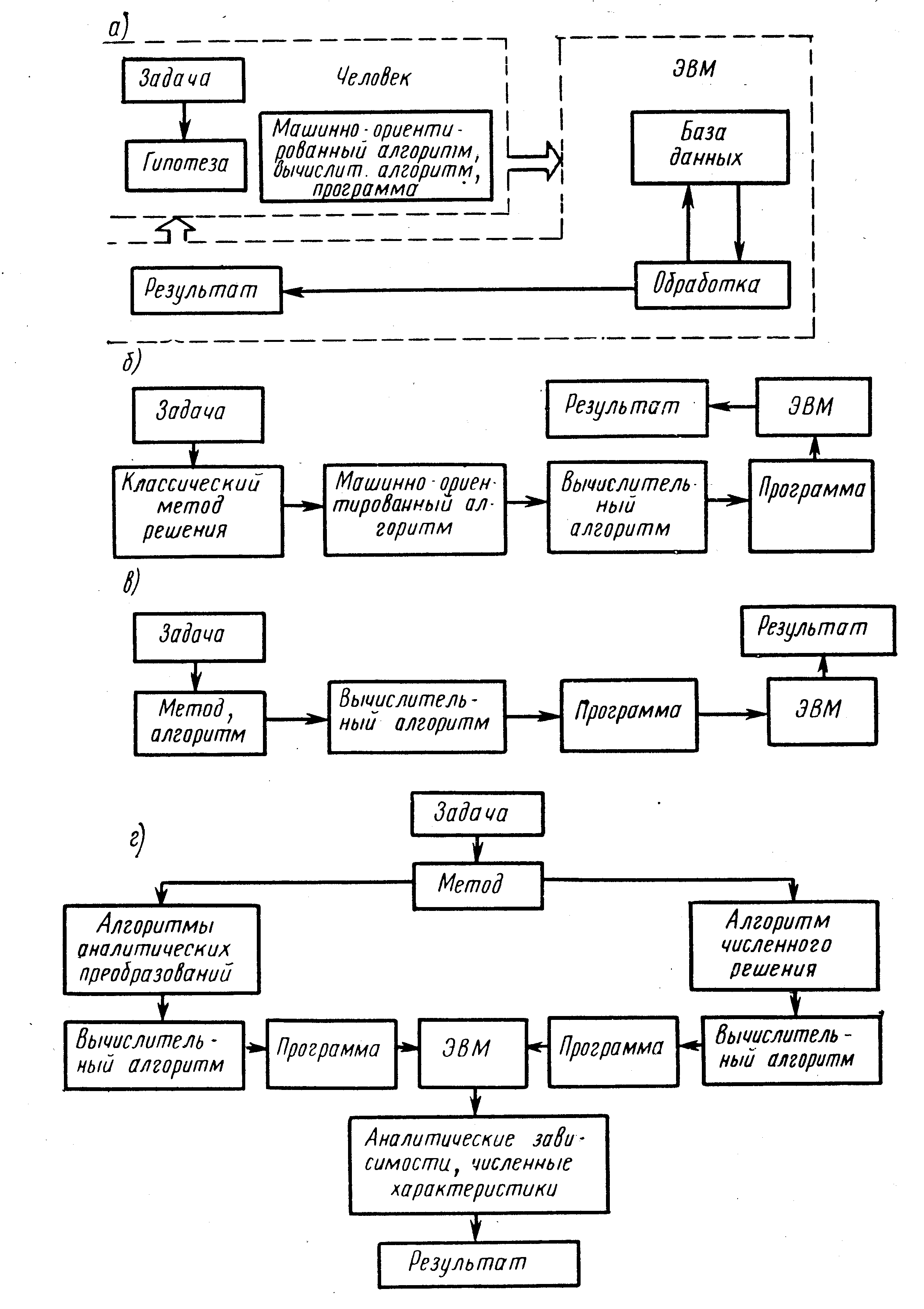
Рис.19. Функциональные схемы методов.
Машинная ориентация классических методов состоит в том, чтобы путем создания соответствующих алгоритмов распространить их на системы высокого порядка, многомерные и многокритериальные; оценки проводить не по одному, а по нескольким параметрам; упростить и ускорить процедуру получения конечных результатов; осуществить сервисное представление результатов, графиков, таблиц, расчетных данных с помощью внешних устройств ЭВМ.
Машинная ориентация классических методов теории САУ позволяет значительно ускорить процесс решения задачи, однако при этом не получается качественно новых методов и требуется определенная работа по созданию алгоритмов и вычислительных алгоритмов. Например, широко известный метод ЛЧХ при его реализации на ЦВМ не встречает особых трудностей для минимально-фазовых систем со слабыми резонансными свойствами. В случае неминимально-фазовых систем с резко выраженными резонансными свойствами вычислительные алгоритмы построения ЛЧХ значительно усложняются. Структурно машинно-ориентированные методы можно представить рис. 20, б.
С другой стороны, при машинной ориентации традиционных методов следует исходить из вычислительных возможностей ЭВМ. Если при «ручных методах» выбор того или иного подхода в решении задачи — дело вкуса исследователя, то для реализации на ЭВМ вычислительные алгоритмы во многом определяют затраты машинного времени, сходимость вычислительного процесса и т. д.
К классическим методам за последние 30 лет добавились многочисленные методы исследования и проектирования сложных современных САУ. Так, в связи с широким внедрением в САУ микроЭВМ, для синтеза регуляторов применяются методы синтеза цифровых САУ, основанные на псевдочастотных АФЧХ, методах фильтрации, робастных методах. Усложнение САУ привело к появлению статистических методов. Строгие математические методы синтеза на основе принципа максимума Понтрягина, динамического программирования Беллмана и их вариации при проектировании САУ получили прикладное развитие за счет приближенных алгоритмов оптимизации.
Итак, машинно-ориентированные методы — это известные в теории САУ методы, реализуемые на ЭВМ в результате составления соответствующего вычислительного алгоритма и программы.
Машинные методы — это методы, которые без ЭВМ не имеют смысла и созданы только для решения задач на ЭВМ (рис. 20, в). Это методы математического и полунатурного моделирования, решения задач численного анализа, синтеза, идентификации, методы расчета и машинной обработки больших массивов информации. Только благодаря машинным методам появилась реальная возможность исследовать и проектировать сложные САУ и их устройства (например, БЦВМ, регуляторы на микропроцессорах) в существующие сжатые сроки и с требуемым качеством. Машинные методы — новые методы в теории САУ, их история не превышает 25—30 лет.
Машинно-аналитические методы — это методы, которые включают в себя как аналитические процедуры, так и машинные численные решения и сводятся к процедурам, представленным на структурной схеме рис. 20,г. При таком подходе оказывается возможным получать в аналитическом виде математические зависимости между характеристиками процессов в САУ и ее параметрами, что открывает широкие пути для дальнейших исследований И в то же время сокращает затраты машинного времени на реализацию всех вариантов численного анализа при «чисто» машинных методах.
Алгоритмы, вытекающие из методов, частично будут изложены как компоненты соответствующих подсистем САПР в гл. 4—10, поэтому ограничимся основными правилами их построения. Алгоритмы строятся из отдельных операторов. В соответствии с методом после задания исходных данных (числовых значений, слов, знаков и т. д.) строится последовательность базовых операторов из заданного их набора. Способы реализации этих операторов считаются известными. Оператор должен быть далее неделимым элементом алгоритма. Составляется структура алгоритма, связывающая базовые операторы. Такую структуру обычно отображают графом, вершинами которого являются операторы, а ребрами— связи между операторами. Различные структуры алгоритмов, представленные соответствующими графами (рис. 20), включают последовательные (рис. 20, а), параллельные (рис. 20, б), циклические (рис. 20, в), переключающие (рис. 20, г), иерархические (рис. 20, д) и комбинированные из рассмотренных структур.
В качестве операторов ui в приведенных структурах применяются операторы (3.16) — (3.18), (3.27) и др., вытекающие из ММ САУ (3.7) —(3.32).
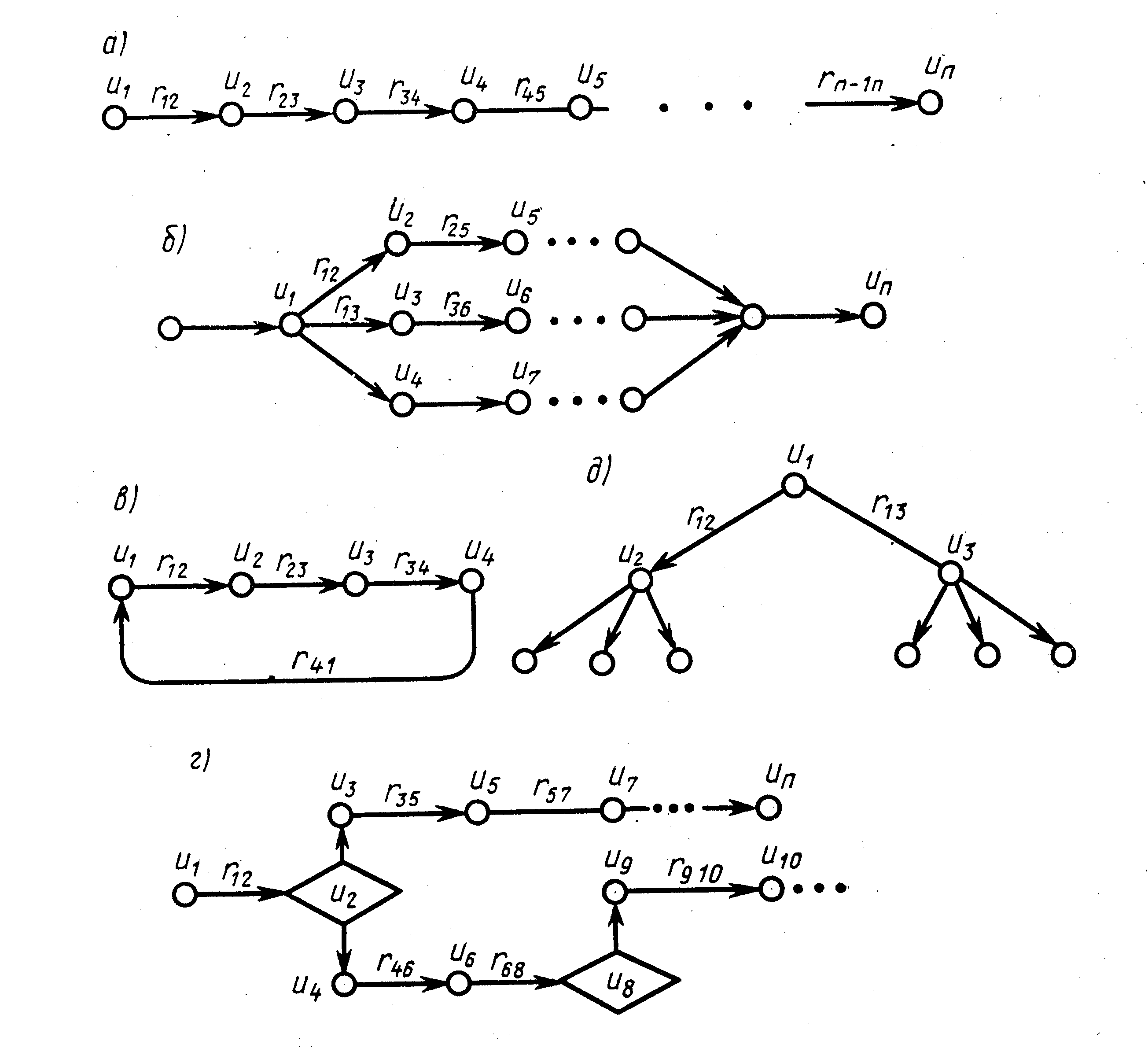
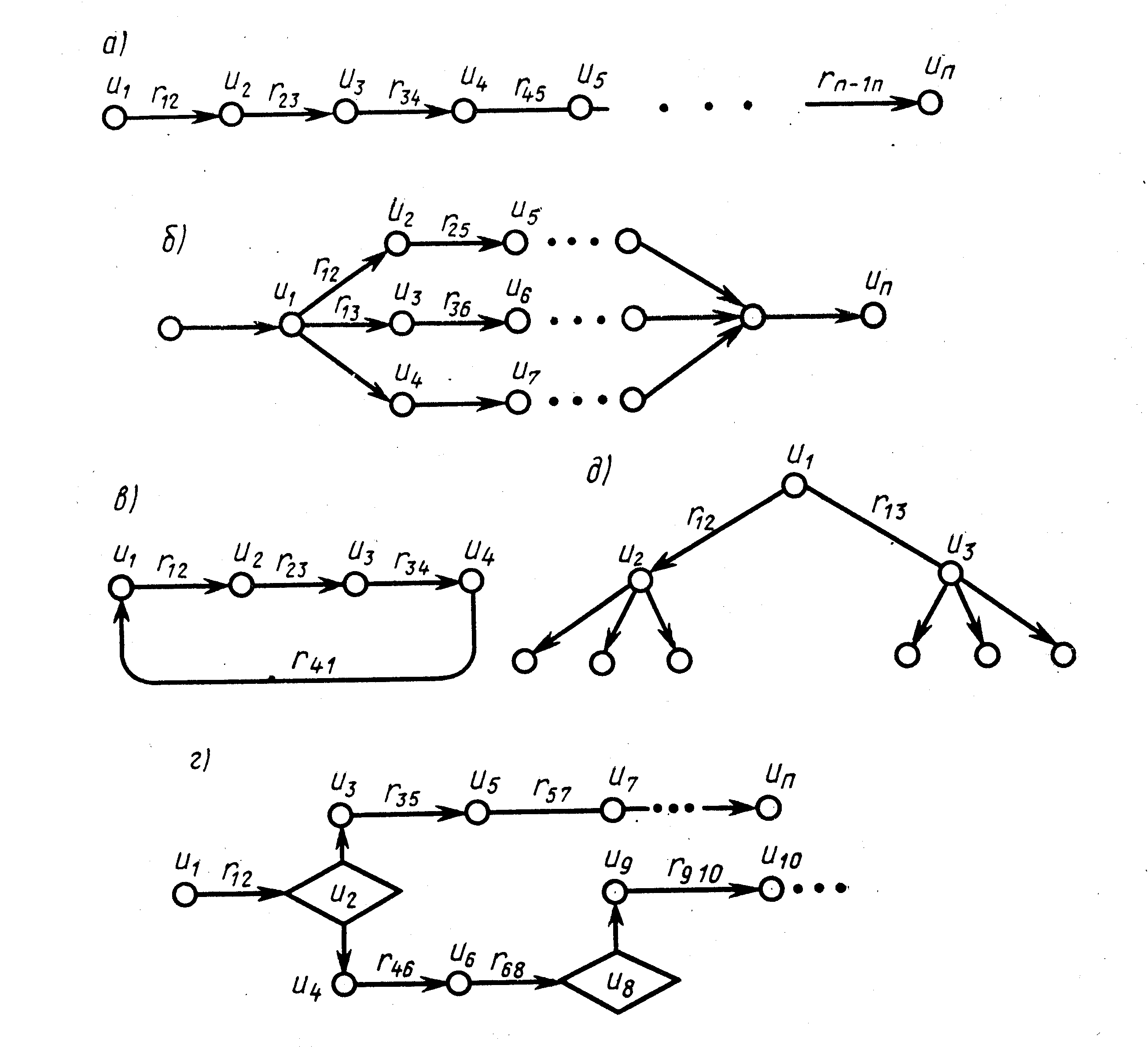
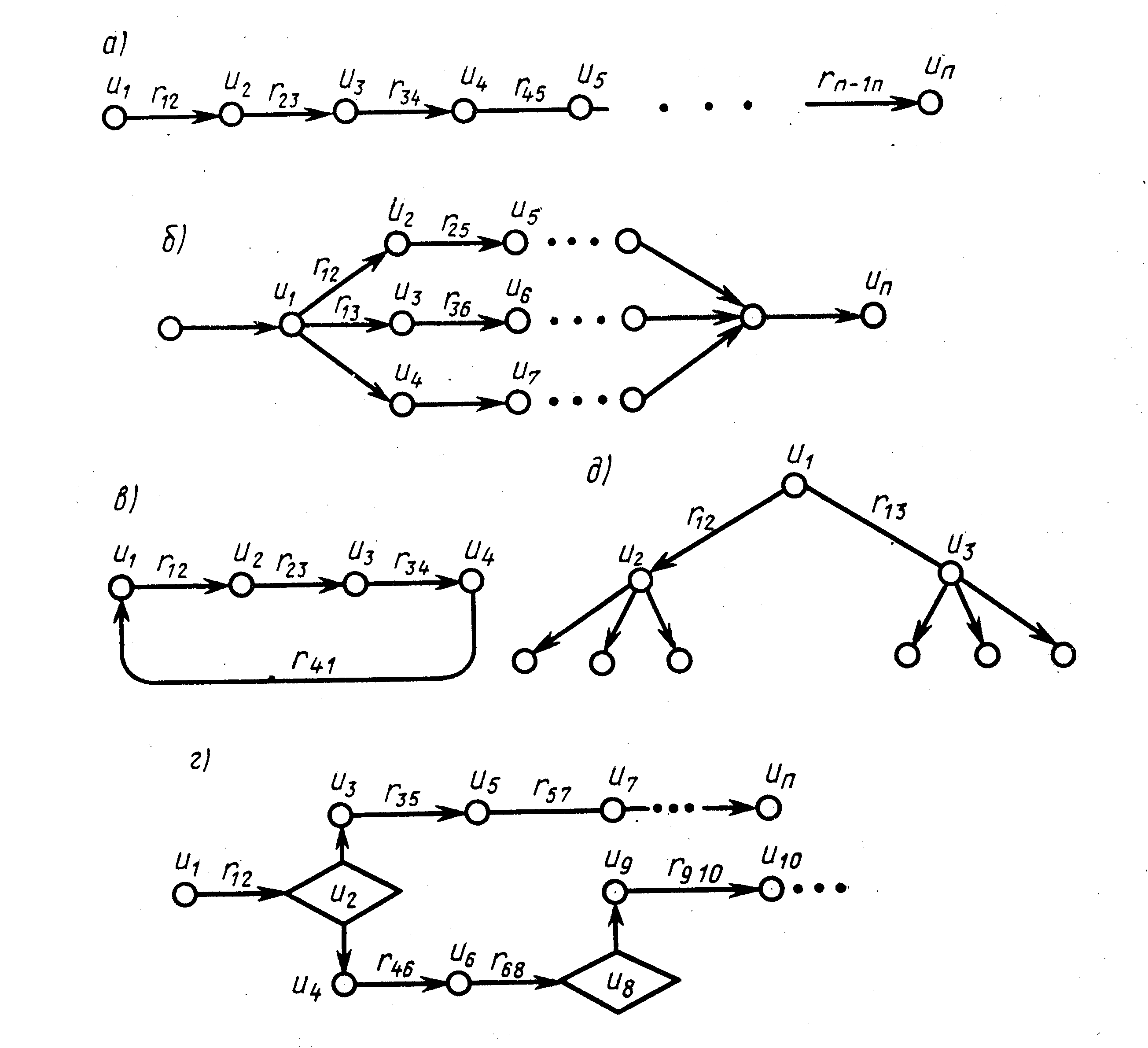
рис. 20. Структуры алгоритмов:
а – последовательная, б - параллельная, в - циклическая,
г – переключающая, д – иерархическая.