

§ 5.4. Контроль и оценка точности моделирования
При исследовании САУ на ЭВМ неизбежны погрешности в машинных решениях из-за субъективных ошибок оператора, сбоев машины и т. п. В этой связи важное значение приобретает контроль машинных решений. Контроль машинных решений становится совершенно необходим при моделировании САУ. Контроль и оценка точности моделирования в общем случае являются сложными задачами, далекими от завершения. Из существующих методов контроля отметим следующие:
Метод сравнения процессов. Этот метод предусматривает сравнение заранее рассчитанных по теоретическим формулам временных процессов с соответствующими машинными решениями, полученными на ЭВМ.
Метод сравнения амплитудно-фазовых частотных характеристик (АФЧХ). В этом случае сравниваются АФЧХ, снятые с модели, реализованной на ЭВМ, с соответствующими характеристиками, заранее построенными, рассчитанными или полученными из эксперимента на реальной аппаратуре.
Метод рассчитанных значений переменных. Для ряда моментов времени фиксируются значения переменных машинного решения и проверяется соответствие правых и левых частей заданных уравнений при подстановке в них найденных на ЭВМ числовых значений.
Оценивая эти и другие методы с точки зрения возможности быстро выявить качественное несовпадение машинного и искомого решения, возможности выявления источников погрешности, а также простоты метода, можно считать, что при моделировании линейных САУ наиболее практичными оказываются первые два метода.
Последовательность операции при таком контроле машинных решений такая:
а) структурная схема моделирования разбивается на замкнутые одномерные подсистемы, представляющие собой звенья 1-, 2-, и 3-го порядка, для которых имеются точные аналитические решения:
б) переходные функции указанных звеньев фиксируются на выходных устройствах;
в) машиные переходные процессы сравниваются с рассчитанными либо путем наложения соответствующих графиков, либо по основным характеристикам качества;
г) по результатам сравнения вводятся корректуры в модели;
д) АФЧХ снимаются с модели исследуемой полной системы и сравниваются с соответствующими характеристиками, заранее рас считанными или полученными экспериментально с реальной САУ.
Указанная последовательность операций контроля позволяет определить качественное соответствие машинных решений искомому, а также выявлять такие ошибки моделирования: погрешно-ности при программировании, вводе массивов исходных данных, погрешности от влияния ошибок округления и т. д.
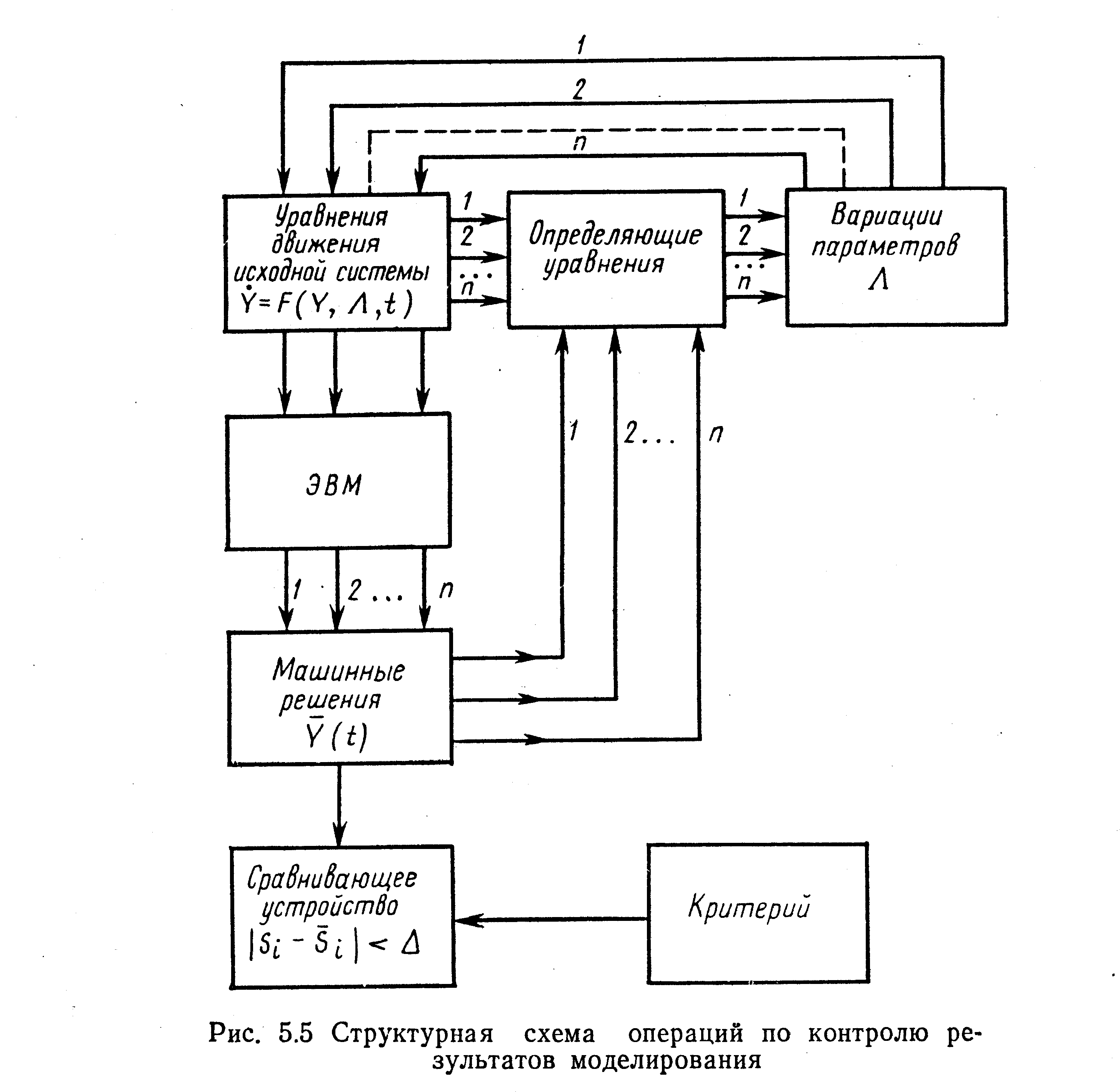
В случае нелинейной системы эффективным оказывается контроль машинных решений способом подстановки на основе машинно-аналитического метода. Сущность такого способа показана на схеме одного из его алгоритмов (рис. 5.5).
Пусть исходные уравнения моделируемой системы имеют стандартный вид
![]()
а их машинные решения y’j(t) аппроксимируются функциями

Контроль, выполненный на предшествующем этапе, позволяет оценить качественное совпадение машинного и истинного решения (оба решения — колебательные, апериодические и т. п.), а для количественной оценки погрешностей машинных решений необходима оценка точности. Оказывается, что погрешность решения является наибольшей при нахождении САУ на границе устойчивости и возможно установление связи максимальной погрешности машинного решения с показателем устойчивости. Поэтому методика оценки точности сводится к выведению САУ на границу устойчивости с помощью вариации какого-либо из регулируемых параметров, оценке погрешности в этом режиме и пересчету полученной величины для любого машинного решения, полученного внутри области устойчивости .