

Глава 4 автоматизация построения математических моделей сау
§ 4.1. Методы построения математических моделей и их применение в сапр
Под математической моделью (ММ) обычно понимается отображение реального объекта с помощью системы математических соотношений.
Наибольшие трудности возникают при построении ММ объектов управления, так как учет физических процессов и явлений в этих объектах требует длительных и весьма трудоемких математических операций. Большое количество однообразных и утомительных операций при построении ММ, в том числе дифференцирование, умножение полинома на полином, раскрытие скобок, приведение подобных членов, неизбежно связаны с многочисленными ошибками и «ненадежностью» ММ. Автоматизация этих операций является обязательной в САПР САУ.
Будем различать графические, аналитические и численные методы построения ММ САУ.
Графические методы применяются при построении ММ САУ на верхнем уровне их описания в форме структурных схем и их графовых эквивалентов. В этом случае проектировщик исходит из представления о САУ как о сложной системе, состоящей из устройств и элементов (см. структурные схемы САУ ЛА, ТГ, ГСП, ШР и их графы на рис. 18). «Внутреннее содержание» устройств обычно отражается типовыми линейными звеньями САУ или условными обозначениями.
Важным условием автоматизации графических способов является разработка алгоритмов ввода структурных и графовых моделей в ЭВМ. Такие алгоритмы будут рассмотрены в § 4.4. Графические методы построения геометрических моделей устройств и элементов САУ широко применяются в конструкторском и технологическом проектировании (см. гл. 8, 9).
При аналитическом построении ММ исходными являются общие законы физики, результаты обобщения тысячелетнего опыта, накопленного ранее усилиями ученых и инженеров. Это прежде всего законы сохранения энергии, массы и вытекающие из них принципы наименьшего действия, непрерывности материальных потоков, кинетико-химических реакций, теплового баланса и т. п. Естественно, что приложение этих законов и принципов применительно к тому или иному физическому устройству САУ приводит к различным выражениям. Так, уравнения движения объекта управления САУ ЛА как твердого тела с шестью степенями свободы выводятся на основе второго закона Ньютона: для поступательного движения ЛА
![]() (4.1)
(4.1)
для вращательного движения ЛА относительно центра масс
![]() (4.2)
(4.2)
где т(t) — масса ЛА; V(t)—вектор линейной скорости центра масс ЛА; F(t)—вектор внешних сил, действующих на ЛА; J(t), ω(t), М(t)—тензор инерции, вектора угловой скорости и момента внешних сил соответственно.
Уравнения движения объектов управления, устройств САУ также выводятся на основе соответствующих законов и принципов. В частности, уравнения движения механических и электромеханических устройств строятся с помощью формализма Лагранжа:
![]()
где Т(qi, qi', t)—кинетическая энергия системы, скалярная функция, зависящая от координат, скоростей, моментов инерции и масс системы; qi(t), qi'(t)—обобщенные координаты и скорости; t — время; Qi(t), —обобщенные силы.
Уравнения движения радиоэлектронных устройств и элементов САУ выводятся на основе законов Кирхгофа I и II рода:
![]()
где Isk, Usк, Еk — токи, падения напряжения и ЭДС в соответствующих контурах электрической схемы.
Уравнения движения гидравлических, пневматических и других устройств САУ выводятся на основе аналогичных законов.
Удобен для вывода дифференциальных уравнений движения динамической системы формализм Лагранжа (4.3). Замечательное свойство формализма Лагранжа — его независимость от выбора обобщенных координат qi, поэтому появляется возможность выбора удобной для исследований системы координат. Обобщенные силы Qi являются производными от функций энергии различного происхождения: потенциальной U(qi) «энергии рассеяния» D энергии регуляторов Е(qi, qi),
т. е.

Пример 4.1. Построение ММ движения звеньев «ноги» шагающего робота (ШР) на основе формализма Лагранжа.
Кинематическая схема в этом примере состоит из двух звеньев и двух шарниров (рис. 4.1). Будем считать для простоты выкладок длины этих звеньев одинаковыми — l, а массы — сосредоточенными в серединах звеньев и также одинаковыми. Тогда кинетическая энергия первого звена будет

![]()
где J1 и ω1 — момент инерции и угловая скорость вращения первого звена относительно начала координат, или
![]() (4.8)
(4.8)
Аналогично, кинетическую энергию второго звена можно представить выражением
![]() (4.9)
(4.9)
а полная кинетическая энергия является суммой энергий звеньев:
 (4.10)
(4.10)
Обобщенные силы Qi для рассматриваемой системы будут
![]() (4.11)
(4.11)
Следуя формализму Лагранжа, запишем теперь выражения для соответствующих частных производных:
 (4.12)
(4.12)
и обыкновенных производных:
 (4.13)
(4.13)
В результате получим выражение для ММ динамики рассматриваемой системы:
 (4.14)
(4.14)
Численные методы формирования ММ, включают в себя последовательность операций по обработке и анализу априорной и апостериорной числовой информации об объекте. В результате выполнения анализа получаются структура и параметры ММ объекта.
Последовательность операций при этом обычно такая.
Задаются математические зависимости между входными и выходными переменными в статике. Проводится факторный анализ априорных и апостериорных данных с целью отсеивания несущественных переменных в этих зависимостях. Под факторным анализом, понимается приближенная оценка параметров и коэффициентов уравнений в зависимости от выбранной меры точности совпадения экспериментальных и теоретических данных.
Проводятся эксперименты по определению реакции системы на воздействия по времени. Строятся оценки динамических характеристик объекта во времени. Строятся математические зависимости между выходными и входными переменными в динамике.
Перечисленные операции методики построения ММ входят как составляющие в большой раздел теории САУ, известный как идентификация систем и устройств.
Под идентификацией в теории САУ обычно понимают построение ММ объектов по априорной и апостериорной информации и, в частности, по известным их входным и выходным сигналам. Наиболее распространены методы параметрической идентификации, когда структура ММ уже задана, а требуется найти только ее параметры в соответствии с заданными критериями адекватности ММ и объекта.
Вопросам идентификации в настоящее время уделяется большое внимание. На базе многочисленных исследований, статей, книг, а также работы конгрессов ИФАК начиная с 1967 г. осуществлялось становление идентификации как важного раздела технической кибернетики.
Определение ММ динамики системы сводится к идентификации оператора L в выражении
![]() (4.15)
(4.15)
где Y=(y1,y2 … yn), Х=(x1, x2 ..., хl) —векторы выходных и входных сигналов САУ;Λ— (λ1, λ2…,λт) —вектор параметров системы; С=(с1 с2, ..., сr)—вектор сигналов помех, возникающих внутри системы; L — искомый оператор, в общем случае нелинейный.
Применяемые на практике методы идентификации разработаны в основном для линейных детерминированных и стационарных стохастических систем. В последнем общем случае большое число этих методов базируется на известном уравнении Н. Винера (американский математик и кибернетик, 1894—1964), выведенном для определения характеристик фильтров:
![]() (4.16)
(4.16)
где h(τ) — неизвестная весовая вектор-функция системы; Кхх(τ) — известная корреляционная матрица; Кxу(τ)—взаимно корреляционная вектор-функция стационарных случайных процессов на входе и выходе этой системы.
Наиболее плодотворными и перспективными являются методы идентификации оператора L, построенные на принципе настраиваемой модели. Основная идея этого подхода сводится к схеме, представленной на рис. 4.2. Эта общая схема включает в себя довольно широкий набор вариантов, которые различаются в основном организацией процесса настройки модели в смысле принятого критерия идентификации. Выбор такого критерия — сложная задача, во многом определяющая алгоритмы и техническую реализацию подобных схем.
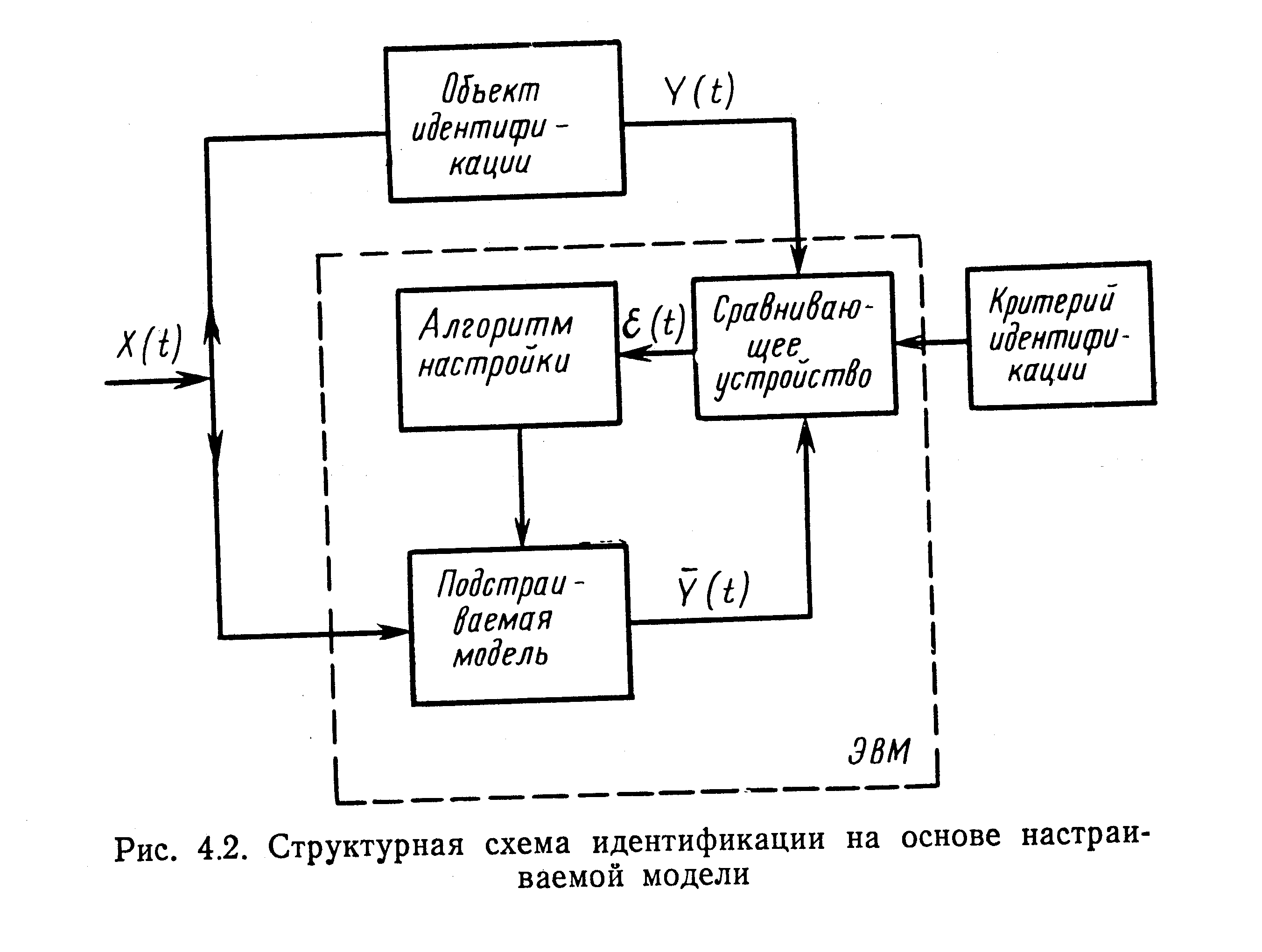
Наиболее распространены выражения критериев в виде функционалов: интеграл квадрата ошибки ε(t)=Y(t)—Y'(t)
![]() (4.17)
(4.17)
интеграл от ошибки с весовой функцией времени
![]() (4.18)
(4.18)
выделяющий ошибку тем больше, чем позже она появилась по отношению к входному сигналу; интегральный критерий вида
 (4.19)
(4.19)
который позволяет осуществлять нормированную по входному сигналу х(t) оценку ошибки ε(t).
В последнее время в качестве критериев идентификации используются получившие распространение в теории оптимальных систем функции потерь или штрафа, под которыми в идентификации понимается штраф, связанный с недостижением абсолютно точной идентификации. В общем виде этот критерий представляют в виде условного математического ожидания штрафа за ошибку:
![]() (4.20)
(4.20)
где G[ε(t)] означает штраф за ошибку ε(t)=Y(t)—Y'(t); Y — истинное значение вектора выходных координат; Y'(t)—оценка Y, основанная на некотором его наблюдении; p(ε / Y) —условная плотность вероятности величин ε и Y.
В схемах с настраиваемой моделью, как правило, структура модели предполагается известной, а настройке подвергаются параметры модели. Наиболее распространенными алгоритмами настройки являются градиентные и итерационные. Применение существующих методов идентификации к САУ приводит к необходимости решения сложных алгоритмических и вычислительных задач в связи с гетерогенностью, большой неопределенностью, многосвязностью САУ.
Наиболее целесообразным способом построения ММ САУ, который можно положить в основу построения соответствующей подсистемы САПР САУ, является сочетание аналитических методов с численными. При этом аналитическими методами строятся возможно более полные ММ, а с помощью численных методов идентификации осуществляется количественная оценка параметров модели и обеспечивается адекватность ее реальному объекту. Такой подход, реализуемый средствами САПР, оказывается эффективным не только для экономии высококвалифицированного труда, но и для значительного повышения адекватности ММ САУ реальному объекту. При этом процедура построения ММ состоит из трех этапов:
— вывод полной ММ в аналитической форме на основе классических принципов и формализмов динамики;
— упрощение и преобразование ММ в соответствии с назначением и особенностью модели;
— параметрическая идентификация упрощенных ММ по результатам экспериментальных исследований и испытаний.
В последующих параграфах рассматриваются вопросы автоматизации первого и второго этапов построения ММ САУ. Автоматизация третьего этапа будет показана в гл. 10 с помощью средств подсистемы «Испытания» САПР САУ.