Математические модели элементов сау.
Математические модели элементов САУ составляются в виде алгебраических, дифференциальных, дифференциально-интегральных, конечно-разностных уравнений. Описание процессов в элементах с сосредоточенными параметрами используют обыкновенные дифференциальные уравнения, а в системах с распределенными параметрами – уравнения в частных производных.
При проектировании САУ нелинейные уравнения обычно линеаризуют и приводят к векторно-матричной форме, либо к частотным функциям.
В тех случаях, когда рассматриваемые процессы в элементах не удается описать указанным выше способом, используют таблицы с числовыми значениями, характеризующие входные и выходные переменные. Применение к ним метода регрессионного анализа, основанного на методе наименьших квадратов, позволяет получить нелинейные, дифференциальные алгебраические уравнения.
Динамические элементы относятся к непрерывным, если рассматриваемые в них процессы и сигналы непрерывны. В этом случае, если входной сигнал и процесс на выходе имеет конечное число значений во времени, то имеем дело с дискретными элементами.
Непрерывные процессы описываются уравнением:
![]() (1)
(1)
![]()
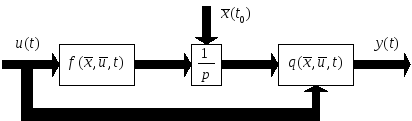
где
![]() –
управляющее воздействие
–
управляющее воздействие
![]() - выходное
воздействие
- выходное
воздействие
Стрелки толстые – многомерная система
Будем считать систему (1) нелинейной, если присутствующие в ней переменные состояния возводятся в степень или входят под знак радикала.
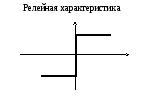
Во многих элементах нелинейности нельзя выразить в аналитической форме, тогда ее представляют графиками, либо в виде таблиц.
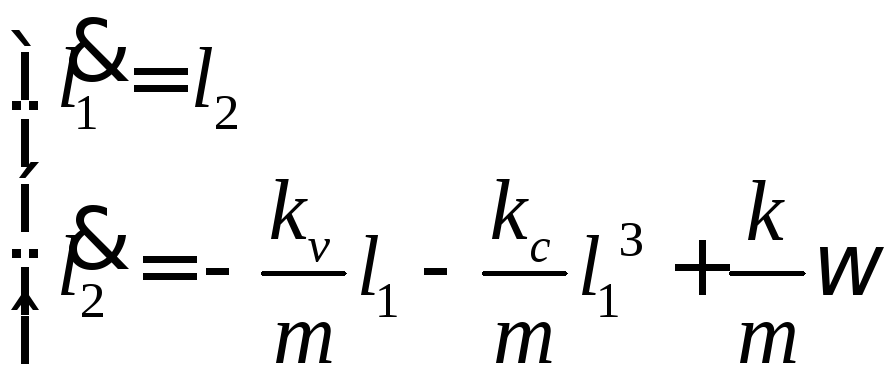
Пример 1. Уравнение устройства для замера угловых скоростей выходного вала ДВС или турбины.
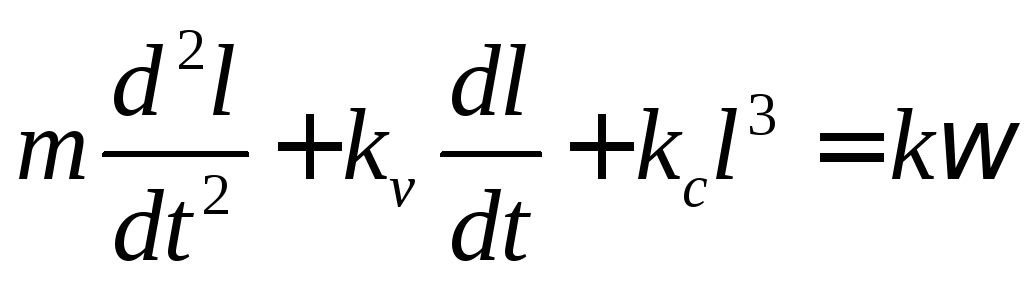
m- масса грузиков и приведенных длин рычагов
l- линейное перемещение
кс- коэффициент жесткости пружины
к - коэффициент пропорциональности угловой скорости ДВС
кv– коэффициент скоростного трения
кс
=
![]()
если обозначить:
Пример 2
Объект регулирование – электродвигатель переменного тока
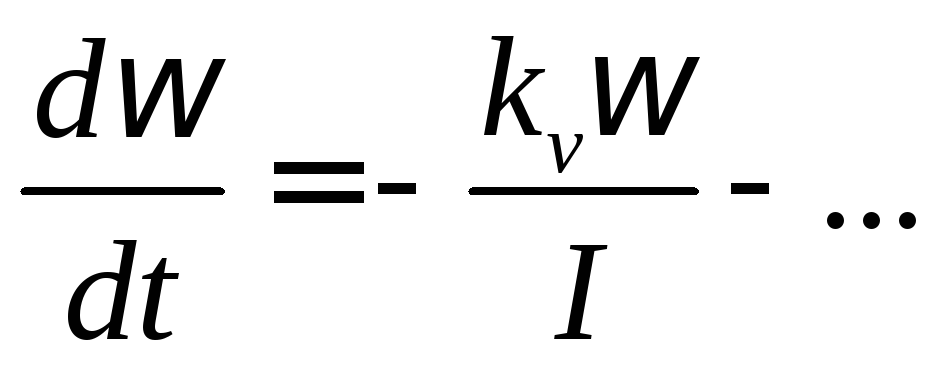
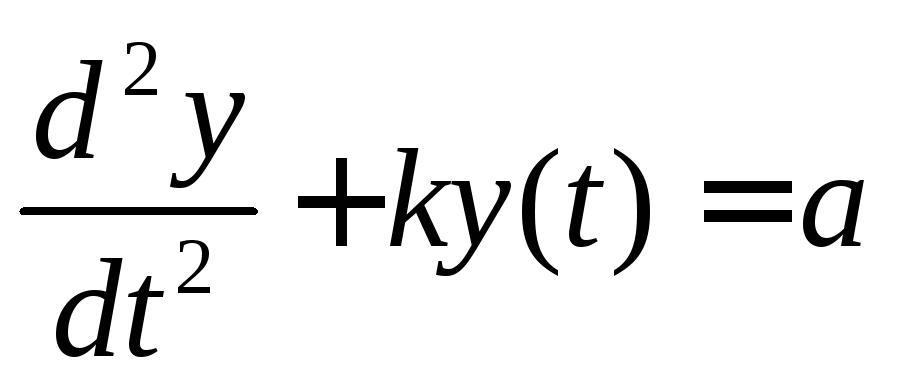
Уравнение вращения:

![]() - угловая скорость
вращения
- угловая скорость
вращения
I- момент инерции
Kv - коэффициент скоростного трения
Kg - коэффициент нелинейности механической характеристики двигателя
KT- коэффициент сухого трения
Ku - коэффициент передачи электрического двигателя
-KT < MT < KT
Алгоритм линеаризации исходных нелинейных уравнений в аналитической форме возможен в простейших случаях.
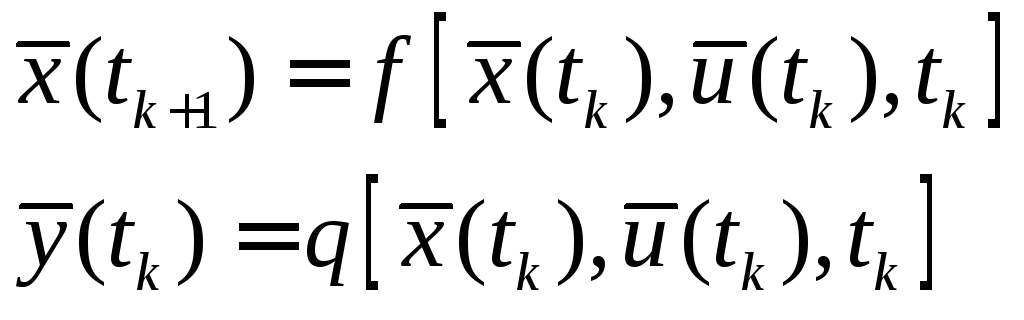
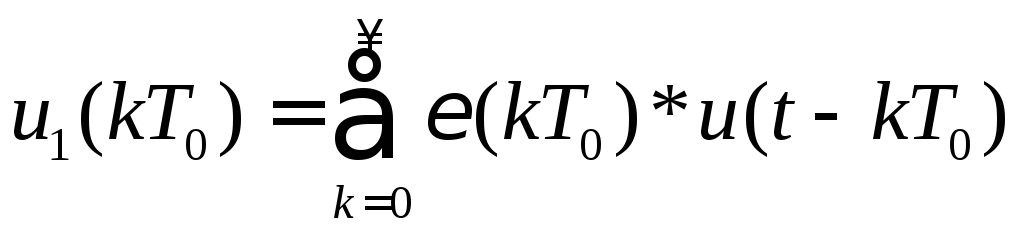
При описании элементов дискретного действия в общем виде пользуются разностными уравнениями.
 (5)
(5)
Наибольшее распространение получил случай, когда шаг квантования постоянный и равен Т0.
В этом случае систему уравнения (5) перепишем:
 (6)
(6)
В дискретных
системах или элементах наряду с
нелинейностями. описанными выше, могут
содержаться нелинейные модуляторы,
ярким примером являются элементы
осуществляющие квантование во времени.
Обычно модуляторы представлены в виде
идеального импульсного элемента,
совокупность
![]() -функции,
формирователь, на выходе которого
получаем импульсы, с которыми имеем
дело. Эти импульсы эквивалентны замене
прямоугольного импульса (для случая
экстраполятора первого порядка), второго
порядка (где имеем максимальное
приближение).
-функции,
формирователь, на выходе которого
получаем импульсы, с которыми имеем
дело. Эти импульсы эквивалентны замене
прямоугольного импульса (для случая
экстраполятора первого порядка), второго
порядка (где имеем максимальное
приближение).
Пример 3.Опишем процессы, происходящие в элементе вал - цифра.
![]() -
выходная величина (сигнал)
-
выходная величина (сигнал)
![]() -
входной сигнал
-
входной сигнал
![]() -
-
![]() -функция
-функция
Если произвести гармоническую либо статистическую линеаризацию, то получим добавление коэффициента
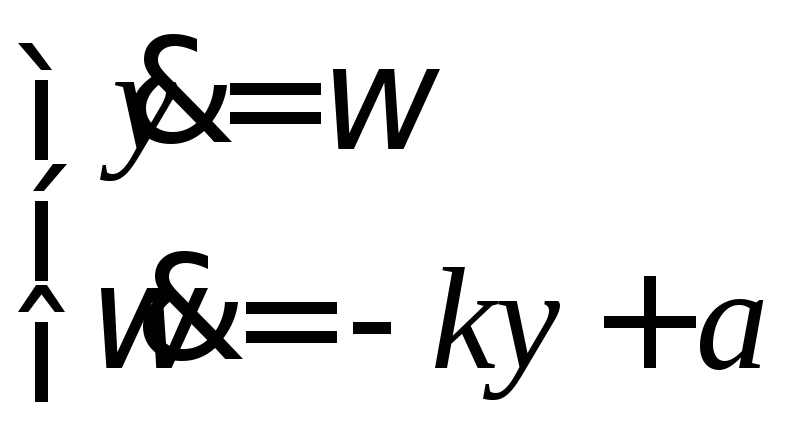
Пример 4.Рассмотрим реализацию на ЦВМ. Систему уравнений в отклонениях от заданных траекторий полета космического аппарата, представленного в виде:
 (8)
(8)
y- вектор отклонения от заданной траектории
к - постоянный параметр
![]() - ускорение,
измеренное акселератором на гироплатформе
летательного аппарата
- ускорение,
измеренное акселератором на гироплатформе
летательного аппарата
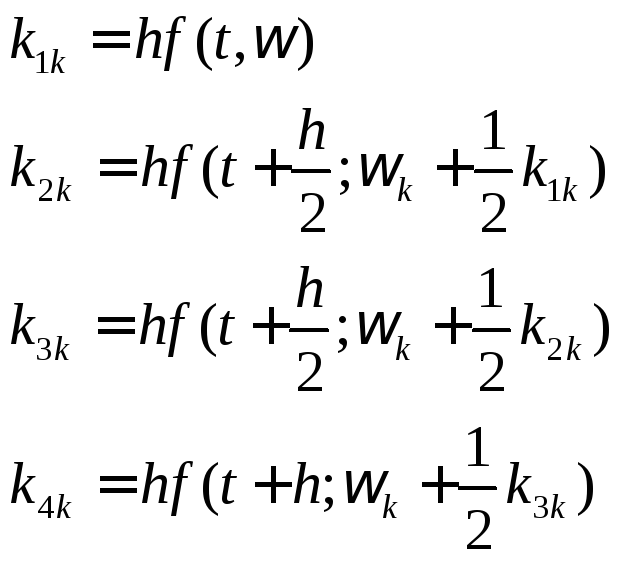
Уравнение (8) является линейным и его решение на ЦВМ реализуется с помощью метода Рунге – Кутта четвертого порядка.

![]()
![]()