

Глава 6 автоматизация анализа сау
§ 6.1. Методы анализа сау и их применение в сапр
Под анализом понимается процесс разделения изучаемого объекта и его свойств на составляющие с дальнейшим наиболее полным выявлением характеристик объекта в зависимости от условий его функционирования.
Процедуры анализа органически входят во всякое научное исследование и обычно образуют его первую стадию, хотя и на последующих стадиях анализ сохраняет свое значение, выступая в единстве с другими процедурами исследования и проектирования. В САПР САУ инструменты анализа непосредственно связаны с инструментами синтеза и моделирования. В частности, задачи синтеза часто удается свести к многократному решению соответствующих задач анализа. Инженерный анализ САУ традиционно проводится алгебраическими, частотными и корневыми методами с привлечением гармонической линеаризации, статической линеаризации, вариантов метода малого параметра. Применение традиционных «ручных» методов анализа к сложным, особенно нелинейным, САУ при решении практических задач в большинстве случаев оказывается затруднительным, напротив — использование инструментов САПР САУ весьма плодотворно. В этой главе рассматриваются возможности применения машинно-ориентированных традиционных и собственно машинных методов анализа САУ и излагается машинно-аналитический метод, разработанный с учетом особенностей САУ. Компоненты лингвистического и программного обеспечении подсистемы «Анализ» строятся аналогично соответствующим компонентам подсистем САПР САУ, рассмотренным в гл. 4, 5, и будут изложены в § 6.4.
Методы, которые образуют компоненты математического обеспечения подсистемы САПР САУ «Анализ», в соответствии с составом математического обеспечения САПР САУ (см. § 3.2) включают в себя:
1) машинно-ориентированные традиционные методы анализа САУ (алгебраические, частотные, гармонической и статистической линеаризации);
2) специально машинные методы, основанные на представлении процессов анализа САУ последовательностью реализуемых на ЭВМ операций над исходными и промежуточными числовыми данными; эти методы практически непригодны при отсутствии ЭВМ;
3) машинно-аналитические методы, необходимым условием применения которых также является наличие ЭВМ, но в отличие от предыдущих промежуточные и конечные результаты исследования могут быть получены не в числовой, а в аналитической форме.
В данном параграфе рассматриваются методы первой группы, которые, по-видимому, и применялись «первыми пользователями» ЭВМ. С середины 50-х годов они использовались для построения амплитудно-фазовых частотных характеристик (АФЧХ), областей Д-разбиения, корневых годографов.
Традиционные методы анализа САУ изложены в многочисленных работах по теории САУ и, как правило, являются скалярными, предназначенными для простых систем невысокого порядка. Такой подход оправдан тем, что при отсутствии ЭВМ анализ и расчет осуществлялись путем приближенных теоретических исследований в сочетании с макетированием и испытаниями, которые составляли, да и сейчас еще составляют большую часть инструментария проектировщика.
Машинная ориентация традиционных методов с целью применения их в САПР состоит в том, чтобы распространить их на многомерные системы высокого порядка, качество САУ определять не по одному, а по многим критериям, упростить и ускорить процедуру получения конечных результатов, а также осуществить сервисное представление результатов (графиков, таблиц, расчетных данных) с помощью средств САПР.
Традиционно анализ САУ сводится к анализу устойчивости, качества и точности. В таком же порядке рассмотрим его машинную ориентацию.
Машинная ориентация методов оценки устойчивости. Как известно, оценку устойчивости линеаризованной САУ можно осуществлять алгебраическими (коэффициентами), частотными и корневыми методами.
1. Алгебраические методы. Эти методы позволяют по коэффициентам характеристического уравнения системы (3.11)
![]() (6.1)
(6.1)
определять необходимые и достаточные условия нахождения действительных частей корней в левой полуплоскости комплексной переменной К. Для применения коэффициентных методов необходимо получить характеристическое уравнение (6.1) исходной системы (3.11), что сводится к раскрытию определителя
![]()
Непосредственное раскрытие определителя (6.2) эквивалентно вычислению диагональных миноров матрицы А. Действительно, после приведения при а0≠0, в частности а0=1 уравнения (6.1) к форме
![]()
оказывается,
что
![]() -сумма диагональных
членов матрицы А; а2
— сумма всех диагональных миноров
второго порядка матрицы А; ...; ап
— определитель
матрицы А. При
этом вычислительные
затраты оказываются весьма значительными.
Так, при
п
= 9 требуется
986400 операций умножения и 725 758 операций
сложения.
Машинная ориентация процедуры раскрытия
определителя
(6.2) состоит в выборе из существующих и
разработке специальных методов,
сокращающих вычислительные затраты.
К существующим методам раскрытия
определителя относятся классические
методы А. М. Данилевского (советский
математик, 1906— 1942);
У. Ж. Ж. Леверье и Д. К. Фаддеева (французский
и советский
математики, 1811 —1877; 1907 г.). Сущность
метода А. М. Данилевского
состоит в приведении матрицы
-сумма диагональных
членов матрицы А; а2
— сумма всех диагональных миноров
второго порядка матрицы А; ...; ап
— определитель
матрицы А. При
этом вычислительные
затраты оказываются весьма значительными.
Так, при
п
= 9 требуется
986400 операций умножения и 725 758 операций
сложения.
Машинная ориентация процедуры раскрытия
определителя
(6.2) состоит в выборе из существующих и
разработке специальных методов,
сокращающих вычислительные затраты.
К существующим методам раскрытия
определителя относятся классические
методы А. М. Данилевского (советский
математик, 1906— 1942);
У. Ж. Ж. Леверье и Д. К. Фаддеева (французский
и советский
математики, 1811 —1877; 1907 г.). Сущность
метода А. М. Данилевского
состоит в приведении матрицы

к нормальному виду — матрице Ф. Г. Фробениуса (немецкий математик, 1849—1917)
В качестве преобразующих матриц Ck выбираются матрицы, последовательно преобразующие строки матрицы А начиная с последней в соответствующие строки матрицы А.
Общее число операций при реализации метода А. М. Данилевского снижается по сравнению с прямым раскрытием определителя (6.2). Так, для п = 9 требуется 648 операций умножения и 576 сложения. Метод Данилевского положен в основу стандартных программ программного обеспечения ЦВМ. Использование этого метода в практике расчета САУ на ЭВМ показало, что при n>6 метод А. М. Данилевского имеет значительные погрешности из-за вырождения промежуточных подобных матриц (их элементы оказываются близкими к 0 при n>6).
Метод Леверье — Фаддеева основан на известной формуле Ньютона для сумм степеней корней характеристического полинома (6.3)
Суммы S1, S2, ..., Sn можно найти на основе известных формул линейной алгебры
Число операций умножения в этом методе оказывается большим, чем в предыдущем, причем для n=9 требуется 5228 операций умножения и 4644 сложения. Однако в отличие от предыдущего метода он нечувствителен к особенностям матриц .А. В то же время метод Леверье-Фадеева быстро накапливает ошибку округления начиная сn=7.
Метод, свободный от недостатков предыдущих классических методов, строится с учетом особенностей машинной реализации, в том числе разряженности исходной матрицы А. Общее выражение определителя матрицы размерностиnимеет вид
![]()
где сомножители аjdj представляют собой элементы матрицы А; v — число инверсий перестановки (d1, d2, ..., dn).
Каждое произведение а1d1 а2d2…..аndn должно содержать элементы матрицы аjdj, расположенные в различных строках и различных столбцах. Это означает, что среди всех первых индексов, как и среди всех вторых, не должно быть одинаковых. Если расположить первые индексы в порядке их возрастания, как это сделано выше, то совокупность вторых индексов образует некоторую перестановку (d1d2... dn)
Число инверсий v перестановки (d1d2... dn) определяет знак слагаемого определителя матрицы и находится следующим образом: для каждого из чисел dj, j=1, ..., п, определяется количество стоящих правее его меньших чисел, и полученные результаты складываются.
Элементы матриц могут быть как отличны от нуля, так и строго равны нулю. Матрица, имеющая небольшую часть ненулевых элементов, называется разреженной. Очень часто матрицы, связанные с моделями САУ, оказываются такими.
Вычисление определителей разреженных матриц связано с нахождением только ненулевых слагаемых и расчетом их знака, что может существенно сэкономить вычислительные затраты.
Рассмотрим алгоритм вычисления определителя разреженной матрицы. Будем рассматривать общий случай полиноминальной матрицы. Алгоритм работает только с ненулевыми элементами матрицы, которые могут быть пронумерованы от 1 до NP.
Вначале
находится индексное выражение очередного
слагаемого
определителя. Оно представляет собой
массив, состоящий из п
номеров
ненулевых элементов матрицы, образующих
слагаемое. Задачу
отыскания индексных выражений слагаемых
определителя можно
свести к поиску особых путей в специальном
графе Г. Каждая
его вершина соответствует ненулевому
элементу aij
матрицы и имеет
вес в виде полинома от λ. Каждая дуга
графа направлена из вершины,
соответствующей элементу i-й
строки матрицы,
![]() в вершину
в вершину![]() -й
строки, принадлежащую другому столбцу:
-й
строки, принадлежащую другому столбцу:
![]()
Элементы первой строки являются истоками, а последней — стоками графа. Ненулевому слагаемому определителя матрицы в графе соответствует особый путь от истока к стоку, который содержит вершины, отвечающие элементам матрицы из разных столбцов. Множество таких путей в точности образует множество ненулевых слагаемых определителя.
|
|
Выражение для определителя матрицы можно записать следующим образом:
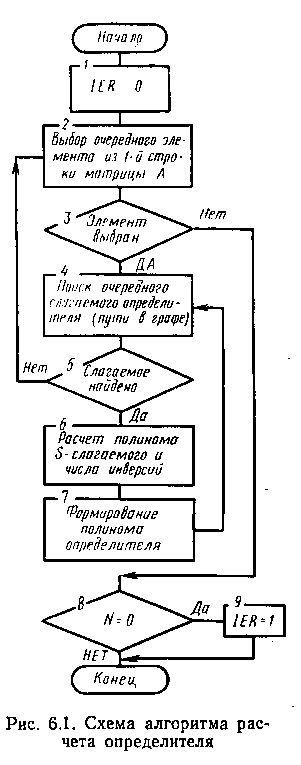
где N* — число слагаемых определителя; Пs — вес s-гo пути, равный произведению весов вершин пути. Знак слагаемого, иначе число инверсий у, находится непосредственно по вторым индексам вершин, входящих в путь. Схема алгоритма расчета определителя разреженной полиномиальной матрицы приведена на рис.6.1. Входными данными алгоритма являются числа и массивы, представляющие ненулевые элементы полиномиальной матрицы N – размер матрицы; NP – число ненулевых элементов матрицы; МТМ — целочисленный массив номеров строк и столбцов ненулевых элементов, каждому i-му (i= 1, ...,NP) ненулевому элементу, которому соответствуют два элемента массива: (2хi—1)-й указывает номер строки, a (2Xi)-и указывает номер столбца; МСМ — целочисленный массив степеней полиномов элементов матрицы: AM— вещественный массив коэффициентов полиномов элементов матрицы; элементы матрицы записываются в порядке возрастания их номеров, коэффициенты каждого полинома записываются начиная со свободного члена. Выходными параметрами алгоритма являются: NXP — степень полинома определителя полиномиальной матрицы; ХР — вещественный массив коэффициентов полинома определителя, NA — число ненулевых слагаемых определителя, IER — параметр ошибки, принимающий два значения {0,1}: 0 — «все в порядке», 1—определитель строго равен нулю. |
Пример 6.1. Расчет характеристического полинома системы РДП (см. рис. 3.9, б).
Матрица А* линейных дифференциальных уравнений этой САР, представленных в форме (3.11), имеет вид
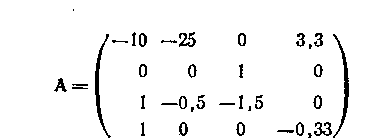
Для нахождения определителя матрицы по формуле (6.5) требуется вычислить определитель (6.2), который составляется по полиномиальный матрице (λЕ-A):
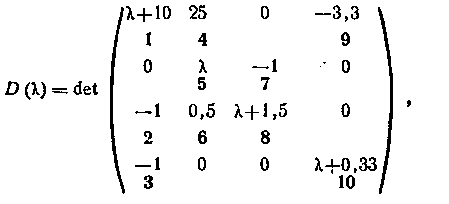
где жирным шрифтом представлены порядковые номера ненулевых элементов матрицы λЕ-A. Входные данные алгоритма запишутся следующим образом: JV = 4, ЛГР=10, МТМ=(1,1; 3,1;
4,1; 1,2; 2,2; 3,2; 2,3; 3,3; 1,4; 4,4), МСМ= = (1; 0; 0; 0; 1; 0; 0; 1; 0; 1), AM ==(10,1; —1; —1; 25; 0,1; 0.5; —1; 1.5; 1; —3.3; 0.33; 1).
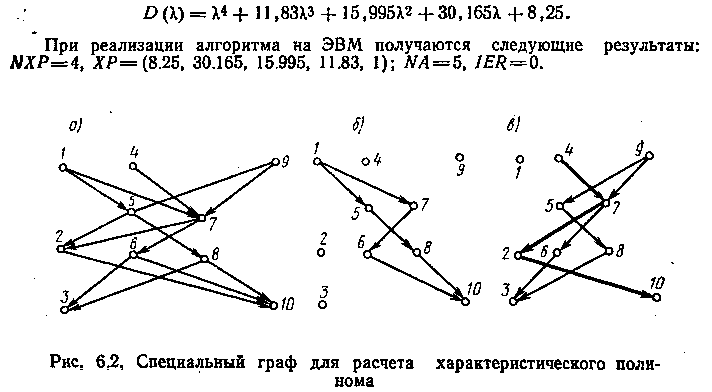
Специальный граф для этой матрицы приведен на рис. 6.2, а.
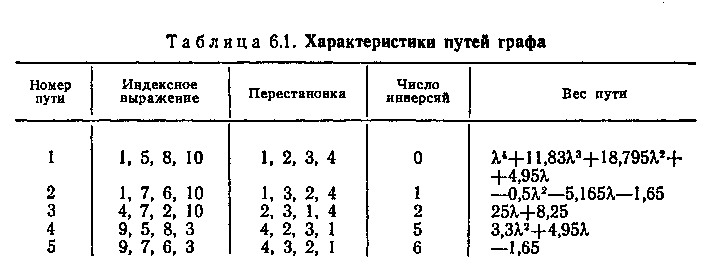
В графе имеется пять особых путей, соответствующих ненулевым слагаемым определителя. Общее же число слагаемых равно N! = 24. Следовательно, 19 из них являются нулевым и не определяются рассматриваемым алгоритмом. На рис. 6.2, б показаны два пути, выходящие из вершины 1, а на рис. 6.2, в — один путь из вершины 4, выделенный жирной линией, и два пути из вершины 9. Характеристики путей приведены в табл. 6.1.
Искомый определитель искомой матрицы находится по формуле (6.5) в результате суммирования весов путей, взятых с соответствующим знаком:
Таким образом, получение характеристического полинома (6.1) обеспечивается стандартными и специальными программами, реализуемыми на ЦВМ. В то же время надо всегда иметь в виду, что построение полинома (6.1) для каждого частного вида матрицы А может встретить много препятствий вычислительного характера, преодоление которых зависит от искусства алгоритмиста и программиста. Перейдем теперь непосредственно к критериям оценки устойчивости по полиному (6.1).
Критерий А. Гурвица (немецкий математик, 1859—1919) сводится к установлению положительности главных миноров определителя вида:
При условии, что a0>0, Для реализации критерия Гурвица требуется вычисление п—2 определителей, что при п>10 приводит к весьма значительному расходу машинного времени. Напомним, что число операций умножения при вычислении определителя, например 9-го порядка, 986400.
Более удобен при машинной реализации критерий, который строится по определителю Гурвица и требует оценок:

Число вычислительных операций в этом случае значительно уменьшается.
В некоторых случаях целесообразно для машинной реализации воспользоваться предложенным венгерским математиком К. Ланцошем критерием. Для его применения в характеристическом уравнении (6.1) произведем замену переменной λ,= 1—ρ/(1+ρ). Тогда вместо (6.1) получим boρn+b1ρn-1+ ... +bn=0.
При Re(λ)<0 преобразование λ= (1—ρ)/(1+ρ) отображает левую полуплоскость λ внутрь круга единичного радиуса плоскости ρ. Поэтому необходимым и достаточным условием устойчивости будет

что с вычислительной точки зрения также является более экономичным, чем вычисление определителей Гурвица.
Наиболее эффективен с вычислительной точки зрения алгоритм на основе алгебраического критерия, предложенного английским математиком Э. Раусом еще в 1877 г. Запишем характеристический полином (6.1) в виде, ориентированном на применение ЭВМ, когда коэффициенты полинома являются элементами некоторого массива А:
![]()
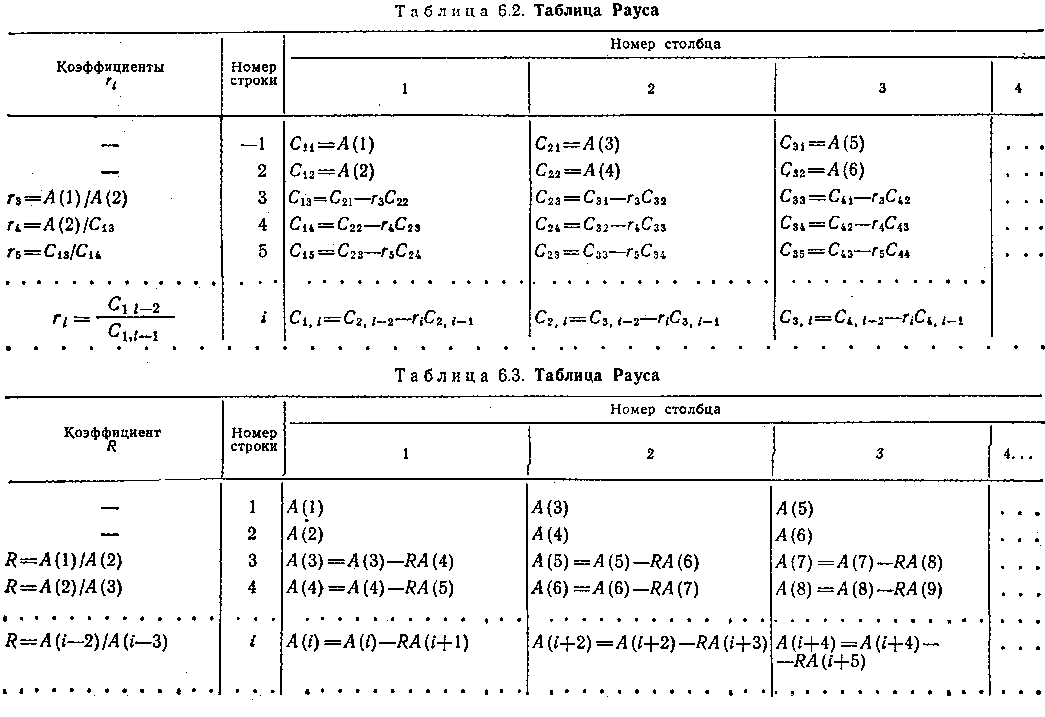
Алгоритм Рауса поясняется в табл. 6.2. Число строк таблицы Рауса равно степени характеристического полинома плюс единица (N+1).
В первой строке табл. 6.2 записывают коэффициенты характеристического полинома (6.6) —элементы массива А в порядке возрастания номеров, имеющих нечетные номера A(1), A(3), ...; во второй строке — элементы с четными номерами A(2), A(4), ....
Остальные коэффициенты таблицы вычисляются по формуле
![]()
где r = C1,i-2/C1,i-1, k— номер столбца; i — номер строки таблицы. Суждение об устойчивости системы делается по коэффициентам первого столбца таблицы. Для того чтобы корни полинома находились слева от мнимой оси, необходимо и достаточно, чтобы коэффициенты первого столбца таблицы Рауса были одного знака, например при А (1) >0
![]()
|
|
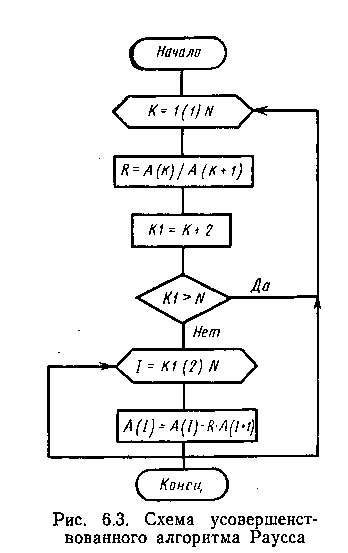
Если не все коэффициенты первого столбца имеют один и тот же знак, то не все корни полинома лежат слева от мнимой оси и число корней справа от мнимой оси равно числу перемен знака в первом столбце таблицы Рауса. Изложим эффективный вычислительный алгоритм расчета элементов таблицы, не требующий введения дополнительных массивов . Исходными данными для алгоритма являются степень и массив А коэффициентов полинома. В результате работы алгоритма в массиве А находятся коэффициенты первого столбца Рауса. Схема алгоритма приведена на рис. 6.3. Работа алгоритма для полинома п-й степени (6.6) поясняется табл. 6.3. В первых двух строках табл. 6.3 находятся элементы массива А, в которых записаны коэффициенты полинома — исходные данные для алгоритма. В первом столбце табл. 6.3 после окончания работы алгоритма располагаются элементы массива А, в которых находятся коэффициенты первого столбца таблицы Рауса. Элементы таблицы Рауса вычисляются начиная с 3-й строки, а в каждой строке — слева направо. Можно убедиться, что результаты расчетов по табл. 6.2 и 6.3 совпадают, эффективность вычислений во втором случае выше. |
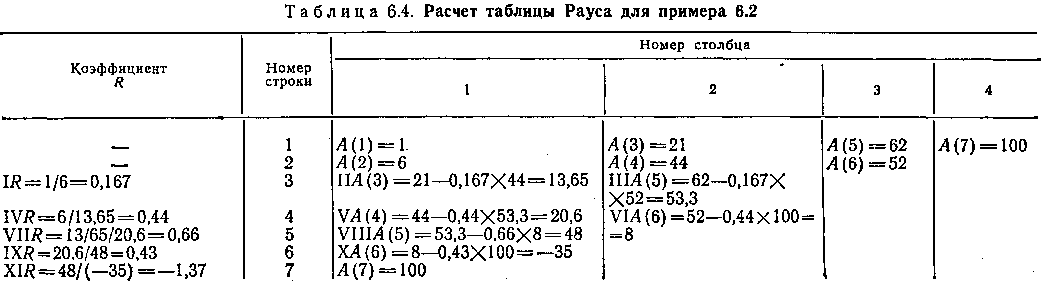
Пример 6.2. Пусть требуется исследовать устойчивость системы, характеристическое уравнение которой имеет вид
![]()
Работа алгоритма поясняется табл. 6.4, в которой римскими цифрами указана последовательность вычислений элементов таблицы. Этот расчет можно сравнить с расчетом традиционным алгоритмом, приведенным в [6]. Коэффициенты первого столбца табл. 6.4 имеют разные знаки, поэтому не все корни находятся в левой полуплоскости и система является неустойчивой. Наличие двух перемен знака коэффициентов первого столбца означает, что характеристический полином имеет два корня справа от мнимой оси.
Для дискретных систем имеется аналогичный непрерывный критерий Шур — Кона для уравнения
![]()
где z=epTo; T0— такт дискретности; р — оператор Лапласа.
Оценка с помощью этого критерия «на прямую» при большом п весьма громоздка. Если воспользоваться обратным преобразованием г=(1+ λ)/(1— λ), то круг |z|≤l отображается на область Re(λ)^0, что позволяет применить тот же критерий Рауса. Однако предварительное преобразование исходного характеристического уравнения после замены z= (1+ λ)/(1— λ), приводит к дополнительным пересчетам коэффициентов аk в новые коэффициенты bj:
Практика расчетов устойчивости САУ подтвердила преимущества алгоритма, представленного в табл. 6.3. Однако по-прежнему вычислительные погрешности становятся существенными при n>10.
2. Частотные методы. В решении задач анализа устойчивости и качества САУ широко применяются методы частотных характеристик (ЧХ), так как по ЧХ проектировщик может судить о таких важнейших характеристиках САУ, как запасы устойчивости по амплитуде и по фазе, резонансная частота, колебательность и т. д. Реализация их на ЭВМ требует переделки и видоизменения исходных алгоритмов применительно к машинной специфике. Практическое значение частотных методов исследования систем автоматического управления заключается в'их наглядности и возможности сопоставления экспериментальных и расчетных данных.
Несмотря на значительное число предложенных алгоритмов расчета ЧХ на ЭВМ, их построение для характерных в промышленных САУ неминимально-фазовых звеньев с резко выраженными резонансными свойствами наталкивается на значительные трудности. Минимально-фазовые системы обладают однозначным соответствием амплитудной и фазовой ЧХ, а неминимально-фазовые таким свойством не обладают. Так, звено с передаточной функцией 1/(1—Тр) имеет фазовую характеристику
Наличие резонансных пиков на амплитудной ЧХ (АЧХ), скачков фазы на фазочастотных характеристиках (ФЧХ) требует проведения неоднократных «ручных» изменений шага по частоте о в процессе вычислений с целью отслеживания резких изменений. Определенные трудности имеются и при вычислении истинных значений ФЧХ, которые обусловлены тем, что аргумент комплексного числа определен только с точностью до чисел вида 2πk, где k — целое число.
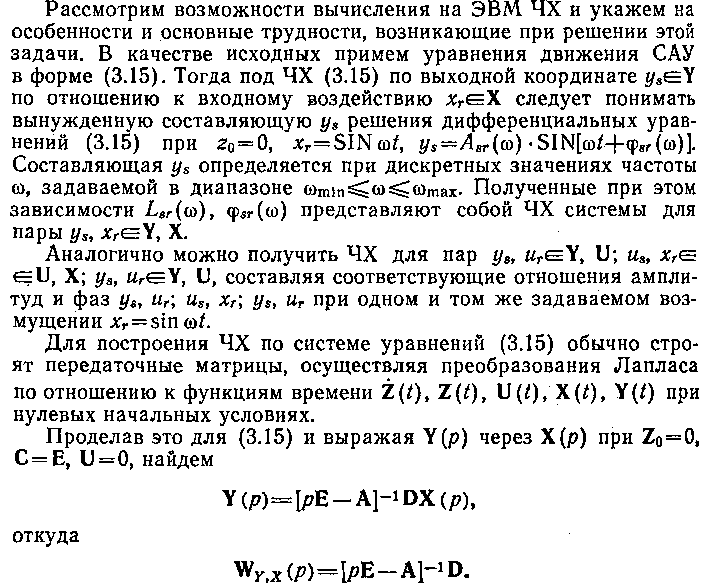
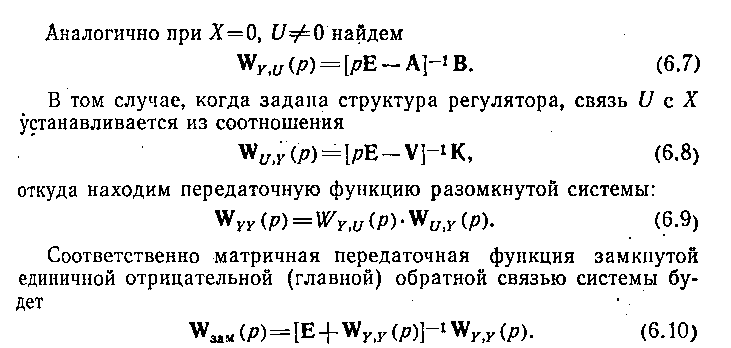
Из матричных соотношений (6.7) — (6.10) можно получить частные передаточные функции, связывающие отдельные составляющие векторов Y, U, X между собой.
для которых выражения [Wi(ω)], φi(ω) имеют известный канонизированный вид. Передаточная функция е-pτi определяет звено с запаздыванием, которое воспроизводит входной сигнал без искажений, но с постоянным запаздыванием по времени на величину τi. Такие звенья встречаются в САУ ЛА, ТГ, ГСП, ШР и других для отображения передачи сигналов через дискретные элементы или аппроксимации запаздывания в гидравлических, пневматических и электромагнитных цепях.
Из (6.11) можно получить другие элементарные звенья как частный случай, полагая соответствующие коэффициенты αi, βi, γi, аi, bi, ci равными нулю. На ЭВМ рассчитываются количества [Wi]
Остановимся
на некоторых особенностях построения
ЧХ на ЭВМ по приведенной методике.
При реализации (6.13) для углов φ≈π/2значения аргументов
в (6.13) стремятся к ∞, что исключает расчет
таких точек на ЭВМ. Поэтомуarctg(...) в (6.12) следует заменить на выражения
В связи с этим программа вычисления фазы должна строиться с учетом возможных скачков функции φ (ω).
Если βi≠0, bi≠0, т. е. система демпфированная, то φ (ω) — непрерывная функция и скачка фазы не будет.
В любом из указанных «опасных» сочетаний коэффициентов следует проверить, попадает ли
В том случае, когда передаточную функцию Wks(p) не удается представить в виде набора функцийWi(p) и возникают особенности вWks(p) из-за наличия неминимально-фазовых и резонансныхзвеньев, приходится строить алгоритм вычисления ЧХ для общего случая представления Wks(p) в виде
Исходной информацией
для расчета по-прежнему являются массивы
![]() и
и![]() ,
граница диапазона частот
,
граница диапазона частот![]() ,
в котором требуется построить ЧХ.
Определение необходимых для построения
ЧХ значений
,
в котором требуется построить ЧХ.
Определение необходимых для построения
ЧХ значений может производиться
средствами комплексной арифметики,
входящей в математическое
обеспечение ЭВМ без предварительного
определения их
аналитических выражений. Если по
каким-либо причинам применение
стандартных средств комплексной
арифметики нежелательно,
то расчет ЧХ производится следующим
образом [14,17]. Вычисление
значений вещественной и мнимой ЧХ
осуществляется по
выражениям
может производиться
средствами комплексной арифметики,
входящей в математическое
обеспечение ЭВМ без предварительного
определения их
аналитических выражений. Если по
каким-либо причинам применение
стандартных средств комплексной
арифметики нежелательно,
то расчет ЧХ производится следующим
образом [14,17]. Вычисление
значений вещественной и мнимой ЧХ
осуществляется по
выражениям
![]()
где RA, RB — вещественные части, a JA, JB — мнимые части полиномов числителя и знаменателя в (6.17) на частоте оз. Для определения значений полиномов лучше всего приспособлена схема Горнера, позволяющая во многих случаях избежать ситуаций переполнения и исчезновения порядка, поэтому вещественные и мнимые части полиномов вычисляются по рекуррентным соотношениям, полученным на ее основе:
![]()
Следовательно, нужно найти корень 0 уравнения (6.22) и при этом значении корня вычислить значение амплитудной характеристики.
Такой подход позволяет выводить на печать только интересующие проектировщика параметры: запасы устойчивости по амплитуде и фазе, резонансную частоту, частоту среза и т. д.
3. Корневые методы оценки устойчивости. Оценка устойчивости линейной САУ может быть выполнена на основе анализа корней характеристического уравнения (6.1) в предположении, что уравнение уже получено одним из приведенных в п. 1 способов.
Из существующих методов вычисления корней характеристического уравнения, реализованных в программном обеспечении ЦВМ, достаточно приемлемыми при анализе САУ оказались методы Рутисхаузера и Хичкока [2].
Алгоритм Хичкока решения уравнения (6.1) любой степени строится следующим образом. Перепишем уравнение (6.1) в виде a1λn+ a2λn-1 + ... + an+1 = 0, где ai — вещественные числа, а п — любое целое число. Алгоритм заключается в следующем: задавшись начальными приближениями р0 и q0, проводим следующие операции:
При верных р и q, должно быть c = d = 0. Начальные приближения р и q ищутся, например, с помощью программы псевдослучайных точек, равномерно распределенных в единичном многомером гиперкубе. Оценка изменения р и q определяется следующим образом:
![]()
В дальнейшем строится итерационный процесс ph+l=pk+Δp, qk+l = qk-+Δq. Для рассмотренного и других алгоритмов решения уравнения (6.1) существенна сильная чувствительность точности вычислений к изменению коэффициентов уравнения (6.1). Так, для уравнения
λ4 -4 λ 3+(6-49*10-8) λ 2-4 λ +1=0
корни имеют значения λ i= 1,02681; λ 2=0,97389; λ 3,4=0,99976±j0.02645, тогда как пренебрежение величиной 49*10-8 сразу приводит к очевидному результату λ 1.2.3.4=1.
Особые трудности возникают при вычислении близких по модулю корней. В этом случае иногда оказывается полезным «изменить» характеристическое уравнение. Например, для уравнения
λ5 -5 λ 4-9 λ 3+5 λ -1=0
где λ i= 2,6180; λ 2=0,3820; λ 3=1,0; λ 4,5=0,5±j0.8656 требуется 15 тыс. итераций, чтобы найти эти корни [2].
Если же сделать замену λ = λ *+1, то корни уравнения
λ*5 - λ *4-2λ *2- λ* =0
λ i*= 0; λ 2*=1,6180; λ 3*= -0,6180; λ* 4,5=0,5±j0.8656 отыскиваются за несколько итераций.
После нахождения корней λ i оценка устойчивости производится по значениям Re (λ i). Более детальный анализ устойчивости системы можно сделать путем построения корневых годографов. Для этого строят на ЦВМ зависимости
Re (λ i)=f1(a0, а1, a2,..., aл);
Im (λ i )= f2(a0, а1, a2,..., aл).
Реализуя эти зависимости численно на ЦВМ, для каждого набора коэффициентов а0i, а1i, а2i, ..., апi, i==[1, М], вычисляют значения корней, например, методом Хичкока и изучают изменение устойчивости по миграции корней на плоскости Re (λ i); 1m(λ i).
Машинная ориентация методов оценки качества и точности. Традиционные методы оценки качества и точности САУ делятся на временные, частотные и корневые.
1. Временные оценки качества. Эти оценки на практике осуществляются численными методами, при этом по исходной ММ САУ строится численный переходный процесс в ней, по которому и делаются нужные оценки. При машинной ориентации численных методов преимущества ЭВМ становятся особенно очевидными, причем в этом случае уже нет необходимости в предварительной линеаризации исходной системы. Временные процессы строятся методами, изложенными в гл. 5, однако при анализе помимо воспроизведения процессов, необходимо оценивать по ним характеристики качества и точности. Для этого дополнительно к методам численного интегрирования, добавляются методы обработки детерминированных и стохастических процессов, получаемых на ЭВМ. При оценке качества САУ удобно применение интегральных оценок

предложенных А. А. Фельдбаумом (советский ученый в области САУ, 1913—1969).
Применяют также алгоритмы таких оценок на основе метода наименьших квадратов. Один из таких алгоритмов положен в основу комплекса программ «обработки» подсистемы «Анализ» САПР САУ. Во многих случаях вид временного ряда, полученного в результате численного решения системы (3.10), напоминает решение системы линейных дифференциальных уравнений. Обработку временных рядов такого рода можно свести к задаче аппроксимации заданных отсчетов функций yk(t) принадлежит вектору У, k=[1, N], функциями вида
Найденные в результате минимизации этого функционала характеристики процессов S=(α, η, ω, φ, М) позволяют осуществить подробный анализ исследуемой САУ. Значительно сложнее обработка случайных процессов, которая при анализе САУ становится необходимой в связи со спецификой их применения.
В большинстве случаев используют алгоритмы, разработанные для стационарных и эргодических случайных процессов. Существо этих алгоритмов сводится к оценке математического ожидания
Характеристиками (6.29), (6.30) удобно пользоваться при расчете линейных САУ.
Многочисленные устройства по аппаратурной реализации формул (6.26) — (6.30) основаны лишь на оценках соответствующих статистических характеристик, достоверность, состоятельность, несмещенность и эффективность которых зависят от длины реализации Т.
При реализации на ЭВМ соответствующие разностные алгоритмы имеют вид
где N — количество дискретных ординат реализации; п, т — дискретные аргументы корреляционной функции при единичном такте дискретности.
С целью сокращения «расходов памяти» при вычислениях применяются рекуррентные формулы для расчета RXX (m), rxy (m):

Практика статистического оценивания случайных процессов сформировала значительное количество эмпирических рекомендаций, которые позволяют выбирать время реализации, дискретность выборки, память фильтра для обеспечения достоверности оценок статистических характеристик. Однако при оценках статистических характеристик сигналов в САУ непосредственное использование этих алгоритмов может привести к большим погрешностям, поскольку одной из важных особенностей САУ является нестационарность возмущающих воздействий и некоторых из параметров состояния САУ. В этом случае не выполняется гипотеза эргодичности. Вычислительные алгоритмы статистической обработки сигналов для стационарного и нестационарного случайных процессов по одной реализации, по нескольким реализациям и по массиву реализаций при анализе САУ строятся аналогично (6.31), (6.32) [15].
2. Частотные и корневые оценки качества. Эти оценки строятся на основе алгоритмов (6.11) — (6.21), (6.23), рассмотренных при анализе устойчивости. С помощью АФЧХ и корневых годографов, построенных на ЭВМ, можно определить характеристики качества процессов в САУ. ЧХ дают достаточно подробную информацию о качестве САУ. Однако в отличие от временных частотными методами обычно исследуются линейные системы в формах (3.15)-(3.17).