

§ 6.4. Подсистема сапр сау «Анализ»
Состав компонентов инструмента разработчика САУ «Анализ» строится аналогично рассмотренным подсистемам САПР САУ «Построение ММ» и «Моделирование». Подсистема «Анализ» взаимодействует с остальными подсистемами САПР САУ через программу ИНИЦИАТОР системной части ППО (см. § 3.5, рис. 3.14), так же как и все остальные подсистемы. Компоненты математического обеспечения строятся на методах и алгоритмах анализа, рассмотренных в § 6.1—6.3. Лингвистические компоненты включают в себя ПОЯ «Анализа САУ» и соответствующий язык программирования.
Взаимодействие программных модулей в составе общей структуры подсистемы представлено на рис. 6.8. В частности, комплекс программных модулей, осуществляющих статистическую обработку временных процессов в подсистеме «Анализ», представлен на рис. 6.9. На рисунке обозначены НСП — нестационарный случайный процесс, ССП — стационарный случайный процесс. Структурно этот комплекс программ можно разбить на следующие части:
2—7 — модули обработки нестационарных и стационарных случайных процессов, реализующих основные расчетные алгоритмы (6.26) — (6.32) по получению оценок статистических характеристик;
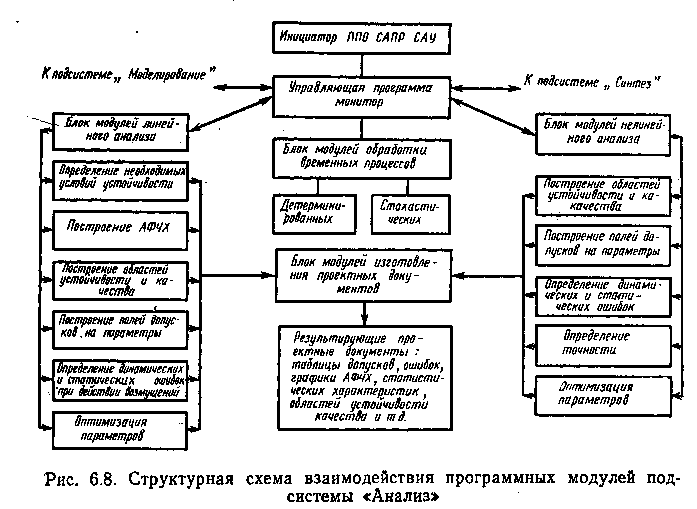
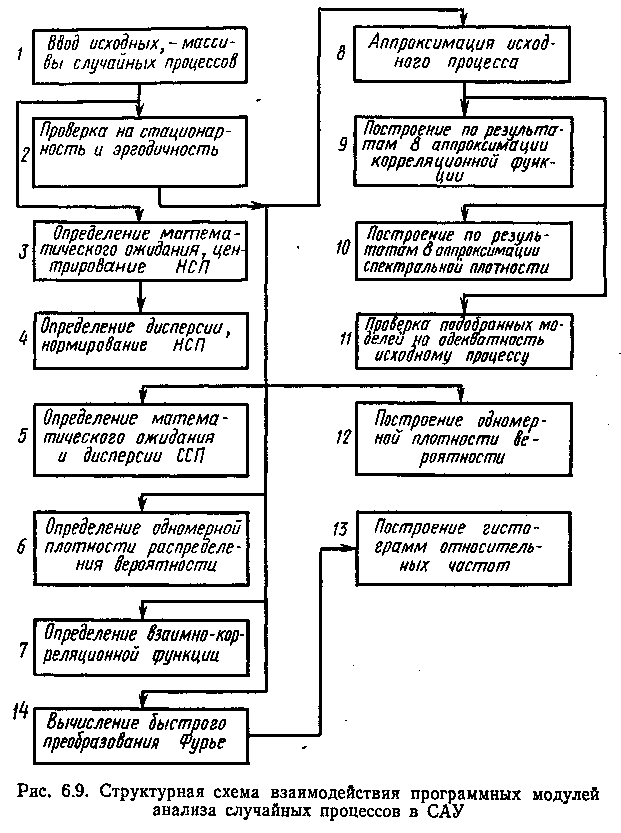
13, 14 — вспомогательные модули, такие, как быстрое преобразование Фурье;
8—12 — модули аппроксимации стационарных случайных процессов.
Входными данными для работы этого программного комплекса являются массивы значений случайных процессов, заданные в виде таблицы, размерность массивов и период дискретизации во времени (предполагается, что дискретизация произведена с выполнением условия теоремы Котельникова).
Глава 7 Автоматизация синтеза сау
7.1. Методы синтеза САУ и их применение в САПР
Под синтезом в научных исследованиях и проектировании обычно понимают решение задач, обратных анализу: определение структуры и параметров системы или процесса в соответствии с заданными критериями качества и условиями функционирования.
Задачи синтеза являются важнейшими и в то же время наиболее сложными при проектировании различных систем и процессов. Как уже отмечалось в предыдущей главе, некоторые задачи синтеза могут быть решены методами анализа. Более того, опытный инженер-проектировщик часто находит вполне пригодные структуру и параметры САУ на основе приближенных расчетов и эвристических методов. Однако трудоемкость такого синтеза оказывается весьма значительной. Так, надо осуществить до нескольких сотен вариантов анализа при выборе корректирующего звена САУ ТГ или параметров САР ГСП и т. д. Полученные проектные решения требуется «доводить» на последующих этапах проектирования, возможны и принципиальные ошибки в проектных решениях. При синтезе структуры и параметров САУ, как правило, не учитываются конструкторские и технологические особенности реализации отдельных устройств и элементов САУ и особенно стыковки их между собой. Например, корректирующее звено с передаточной функцией
полученное методами традиционного синтеза, может оказаться нереализуемым (в частности, на пассивных или активных фильтрах), если не удается обеспечить требуемого соотношения между постоянными времени Т1, Т2,T3, T4 в условиях конструктивных и технологических ограничений.
Прямая реализация теоретических и инженерных методов синтеза, не ориентированных на ЭВМ, часто оказывается невозможной из-за быстрого исчерпывания возможностей ЭВМ по быстродействию и оперативной памяти, неустойчивости вычислительного процесса, накопления методических и трансформированных ошибок, сложности логических операторов и т. д. Поэтому для применения традиционных методов синтеза в САПР требуется их машинная ориентация. Определяющим условием правильной постановки задачи синтеза и построения соответствующего инструмента САПР является формализация целей, критериев и ограничений. Критерии и ограничения при проектировании САУ многочисленны и противоречивы, существенно зависят от типа САУ и условий их эксплуатации. Отмеченное обстоятельство иллюстрируется (см. § 2.1) составом целей и критериев, содержащихся в ТЗ на САУ. Критерии, принимаемые при проектировании САУ, можно представить следующими векторами:

Компоненты этих векторов отражают соответствующие составляющие, имеющие естественное физическое содержание: k1..., kn1 — запасы устойчивости, время переходного процесса, динамические и статические ошибки, колебательность, оценки эффективности; M1...,Mn2 — мощность, потребляемая устройствами САУ, рассеиваемая энергия, энергетические ресурсы источников питания; в1 ..., вn3— вес отдельных устройств и элементов САУ; г1,..., гn4 — — габариты отдельных устройств и элементов САУ; н1..., нn5 — среднее время между отказами, восстанавливаемость, показатели старения САУ, ее устройств и элементов; р1,...,рпб— ремонтопригодность устройств и элементов, восстанавливаемость, доступность при ремонте; с1..., сn7— стоимость отдельных устройств и элементов и всей системы.
В § 2.1 приведены и другие критерии, но даже перечисленные показывают, насколько сложна задача их объединения в единую математическую форму — функционал, причем такой функционал должен связывать структуру и параметры САУ с целями их проектирования. Поэтому часто поступают следующим образом: выделяют главные критерии и второстепенные. По главным отыскиваются экстремальные значения, а на второстепенные накладывают ограничения. В частности, условия

применяются при проектировании САУ ТГ.
Попытки формулирования обобщенного функционала цели проектирования САУ в виде линейной формы
![]()
оказываются несостоятельными ввиду практической неразрешимости задачи оптимального выбора весовых коэффициентов а*. Не меньшие затруднения возникают и для нелинейных функционал вида
![]()
В тех случаях, когда удается связать некоторые из критериев С, К, Н, М, В, Г, P со структурой и параметрами САУ, задачи синтеза САУ сводятся обычно к задаче нелинейного программирования (в частном случае — линейного программирования).
Если же при решении этой задачи приходится интегрировать дифференциальные уравнения, то возникает задача вариационного исчисления и ее развития в виде принципа максимума Л. С. Понтрягина, метода динамического программирования Р. Беллмана. В некоторых случаях в виде функционала цели системы принимают вероятность выполнения условий
![]()
Этот функционал зависит от случайных функций и случайных величин. Функционал (7.6) в отличие от (7.4), (7.5) имеет физический смысл, но вычисление его — исключительно тяжелая задача, посильная только при наличии специальных средств САПР САУ. В частности, для синтеза САУ ЛА функционал (7.6) означает синтез такой САУ, где достигалась бы наибольшая вероятность max {P} удовлетворения всех заданных требований: запасы устойчивости, качество регулирования движения ЛА вокруг центра масс и относительно траектории, точность полета по программе, минимальные все и габариты, минимальный расход горючего,..., ремонтопригодность БЦВМ и т. д.
В некоторых случаях помимо функционалов (7.4), (7.5) и (7.6) используются функционалы типа функций «потерь» или «штрафов». Наиболее распространенная форма представления этого критерия — это условное математическое ожидание штрафа за ошибку:
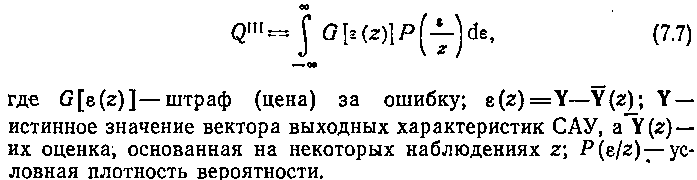
Переход от обобщенных функционалов (7.4) — (7.7) к частным вида (7.2), (7.3) осуществляется в зависимости от типа САУ и конкретной задачи синтеза. Так, далеко не полный учет требований, предъявляемых только к системе стабилизации ГСП (см. § 2.2, рис. 2.8), приводит к следующим критериям и ограничениям, накладываемым на углы стабилизации аi-, углы прецессии βi, моменты разгрузочных двигателей Mсτi время переходного процесса tП.П. управляющий двигателем сигнал δ (t):
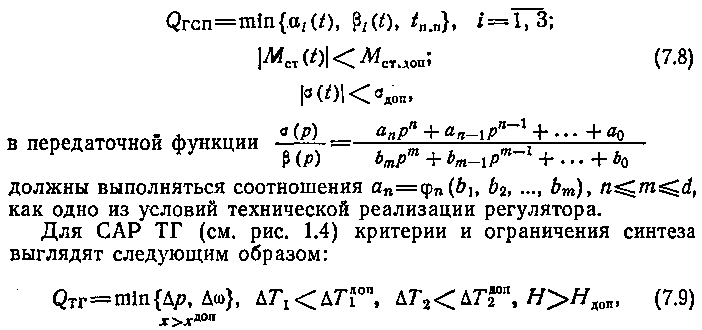
где Δр — ошибка стабилизации давления газа; Δω — ошибка стабилизации частоты вращения турбины; ΔT1доп, ΔT2доп — ограничения на допуск по температуре продуктов сгорания ТГ; Ндоп — ограничения по надежности ТГ.
Критерии синтеза (7.8), (7.9) представляют также в форме интегральных критериев качества А.А. Фельдбаума (6.24).
При реализации традиционных методов синтеза в САПР САУ к ним предъявляются следующие требования: устойчивость и скорость вычислений на ЭВМ; методологические удобства применения методов в соответствии с общей идеологией САПР САУ; достаточная близость или хотя бы непротиворечивость критериев синтеза по отношению к критериям, применяемым разработчиками САУ.
Деление на алгебраические, частотные и корневые методы синтеза сохраняется в том же виде, что и при анализе САУ. Однако содержание и направленность их принципиально иные. Если при анализе требовались оценки устойчивости, качества, точности, то при синтезе необходимо найти структуру и параметры в основном изменяемой части САУ, обеспечивающие заданные, критерии по устойчивости, качеству и точности.
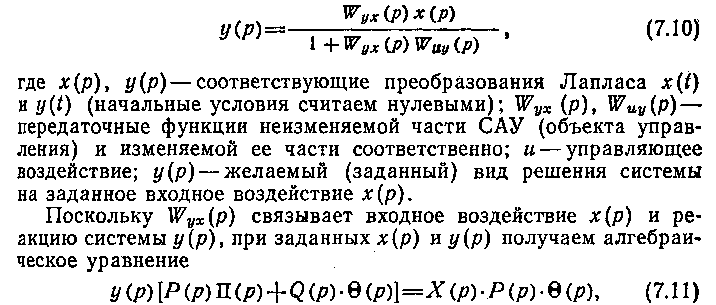
Алгебраические методы синтеза для одномерной САУ строятся на определении вида и параметров передаточной функции изменяемой части САУ в выражении
Рассмотренный подход развит в виде метода полиномиальных уравнений, который может быть применен как к непрерывным, так и к цифровым регуляторам САУ. В последнем случае этот метод наиболее эффективен. По существу он является численным методом решения определенного круга вариационных задач и позволяет единообразным путем, учтя условия физической реализуемости и устойчивости САУ, получить в явной форме выражение оптимальной передаточной функции регулятора Wuy. Важным достоинством метода является то, что оптимальность здесь понимается не только в смысле быстродействия, но и в смысле компенсации нежелательных отклонений САУ от заданного движения, что приближает задачу синтеза к инженерной постановке в смысле критериев (7.8) — (7.9).
Применение метода полиномиальных уравнений требует перехода к «дискретной модели» непрерывной части системы, т. е. представления (3.15)) в формах (3.26), (3.27).
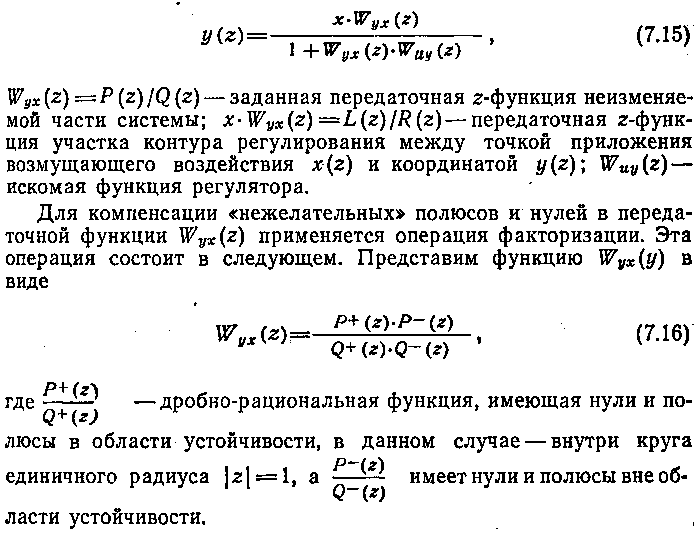
Для удобства последующего изложения рассмотрим алгоритм метода применительно к одномерной системе (7.10). Осуществляя преобразование функции (7.10), представим ее в виде

Тогда y(t) будет процессом конечной минимальной длительности при возможности одновременного обеспечения устойчивости и минимума динамической ошибки. Подставляя найденные П и Θ в (7.17), находим искомую функцию Wuy(z).
При использовании наряду с принятыми дополнительных критериев синтеза, например минимальной суммарной квадратичной ошибки, как ^ выражение (7.17), так и полиномиальное уравнение (7.19) могут значительно усложняться, что, однако, не носит принципиального характера. Метод позволяет весьма точно учитывать ограничения со стороны неизменяемой части системы, путем привлечения аппарата линейного программирования. Задачи статистического синтеза также сводятся к решению систем полиномиальных уравнений. Применительно к задачам синтеза регуляторов САУ метод полиномиальных уравнений имеет ряд преимуществ: простоту машинной ориентации метода, практическое отсутствие вычислительных трудностей и возможность синтеза систем, обладающих свойством удовлетворять совокупности различных требований (достигается абсолютный экстремум по одному из критериев при относительных экстремумах по остальным). Результатом синтеза является передаточная г-функция или эквивалентное разностное уравнение, реализуемые в дальнейшем на микропроцессоре САУ.


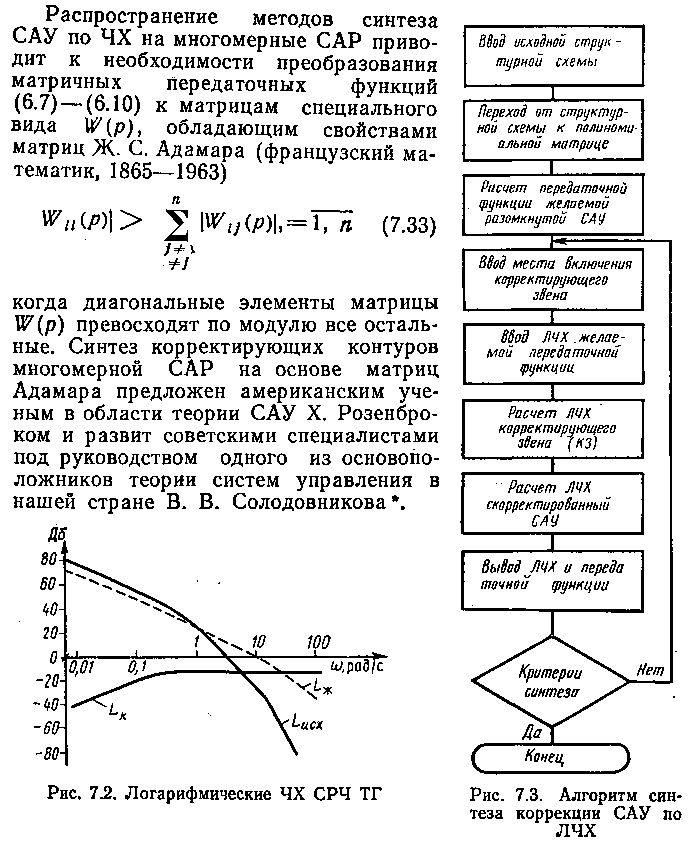
Частотные методы синтеза САУ строятся на основе критериев качества, связанных с ЧХ: запасы устойчивости по фазе (φ) и по амплитуде (L), показатель колебательности (М), частота среза разомкнутой системы (ωср) при учете ограничений на величины динамической (Yдин) и статической ошибок (Yст), обусловленных типовыми воздействиями.
Системы регулирования считаются приемлемыми, если выполняются неравенства
![]()
В простейшем случае такая задача решается путем машинной ориентации метода АФЧХ. В качестве исходных данных задается исходная структурная схема САУ, свойства которой не удовлетворяют критериям (7.31).
На структурной схеме выделяются точки возможного съема и ввода сигналов коррекции, т. е. задается множество возможных мест включения коррекции. По заданным требованиям к динамике системы в соответствии с какой-либо из известных методик частотного синтеза формируются асимптотические логарифмические ЧХ(ЛЧХ) нескольких разомкнутых желаемых САУ, которые должны быть согласованы с ЛЧХ исходной разомкнутой системы и могут отличаться некоторыми параметрами. Автоматизация процедуры синтеза состоит в получении передаточной функции корректирующего звена, обеспечивающего совпадение ЛЧХ разомкнутых желаемой и скорректированной САУ. После получения такой передаточной функции могут быть осуществлены ее аппроксимация и подбор соответствующего «ближайшего» из существующих корректирующих звеньев. Затем проводится анализ скорректированной системы и, если она не удовлетворяет требованиям (7.31), делается следующая итерация синтеза.
Корневые методы синтеза применительно к САУ основаны на построении траекторий корней характеристического полинома передаточной функции (7.10) в зависимости от изменений синтезируемых параметров Wuy (p) в предположении, что структура Wuy (p) — известна. В качестве критерия синтеза используется, в частности, степень устойчивости САУ η.
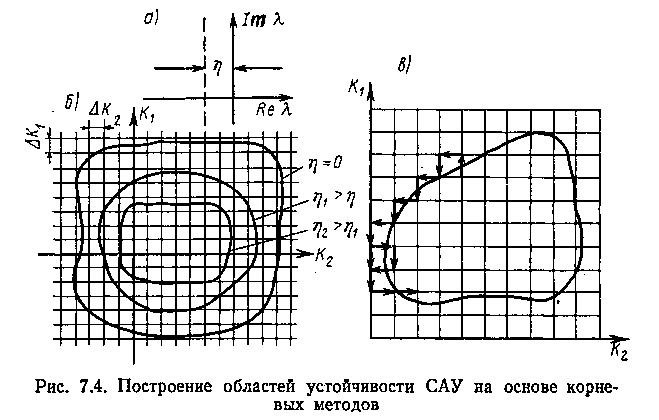
Рассмотрим параметрический синтез по двум параметрам функции Wuy(p), К1 и K2, в зависимости от степени устойчивости ri (рис. 7.4, а). В случае двух параметров К1 , K2 уравнение (6.1) имеет вид
![]()
Построение К1=F(К2) осуществляется следующим способом (рис. 7.4,6). Плоскость К1 , K2 разбивается сеткой с выбранным шагом на квадраты ΔК1 x Δ K2 при замороженных значениях К2 проходят вое узлы К1 выводятся на печать те значения K2, К1 при которых происходит пересечение границы области устойчивости; уточняют границу путем дробления сетки
![]()
Процесс вычислений становится более эффективным, если воспользоваться правилом Лоэба (рис. 7.4, в).
Сущность метода для плоскости состоит в следующем: изменение параметров может происходить только в четырех возможных направлениях — вправо, влево, вверх, вниз. Перемещения осуществляются только во взаимно перпендикулярных направлениях. Если выполняется условие Re(λi)<0, то следующий шаг осуществляется с поворотом по часовой стрелке, а если Rе(λi))>0, то против часовой стрелки. В случае сложной конфигурации границы возможны различные прямоугольные пути движения, устанавливаемые логикой движения в одном направлении (рис. 7.4, в). В том и другом случаях проверка на устойчивость осуществляется с помощью вычисления корней уравнения (7.34) в соответствующих узлах сетки. При этом каждый раз пересчитываются коэффициенты характеристического уравнения аi(К1 , K2 ).
Общим недостатком изложенных в этом параграфе методов, помимо трудностей их применения к многомерным САУ, является то обстоятельство, что в результате синтеза мы получаем лишь предварительную структуру и начальные значения параметров регулятора. При этом необходимо продолжение синтеза с учетом дополнительных критериев и ограничений, накладываемых на САУ при полных моделях неизменяемой их части. Такое «продолжение синтеза» можно свести к оптимизации параметров машинно-аналитическим методом (см. гл. 6) для конкретных САУ и специально машинными методами, которые излагаются в следующем параграфе.