

§ 4.3. Упрощение и преобразование математических моделей на эвм
Основная цель при построении ММ — получение ММ, соответствующих целям исследования или выполняемой проектной процедуре,— достигается путем упрощения и преобразования полной ММ, построение которой показано в предыдущем параграфе.
Почему же нельзя использовать «полные» ММ непосредственно? Полные ММ, как правило, являются избыточными в смысле их применения, они содержат множество «лишних» элементов, затуманивающих, маскирующих суть дела, дальнейшее их использование в инструментах САПР приводит к вычислительным сложностям, большим расходам средств.
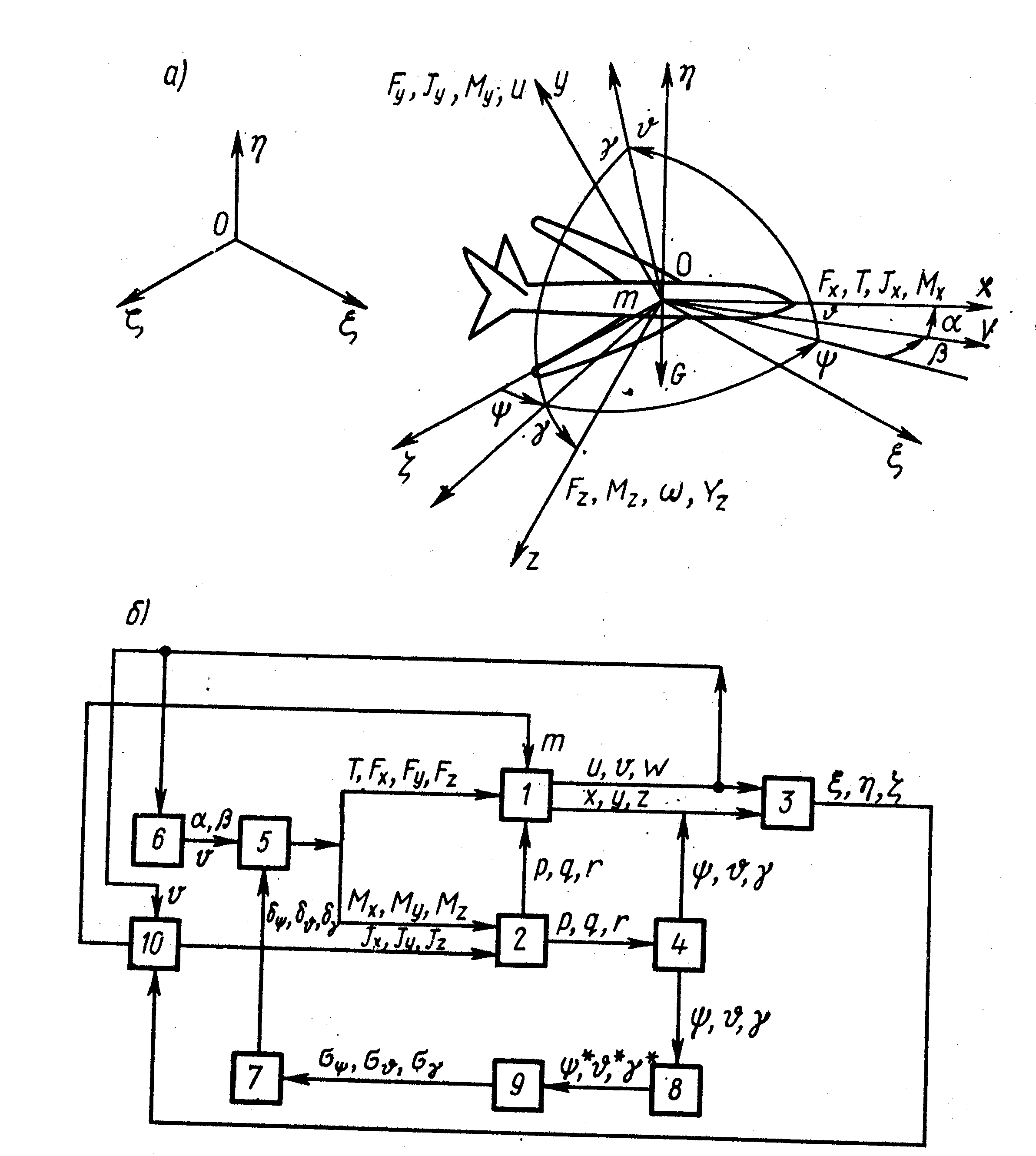
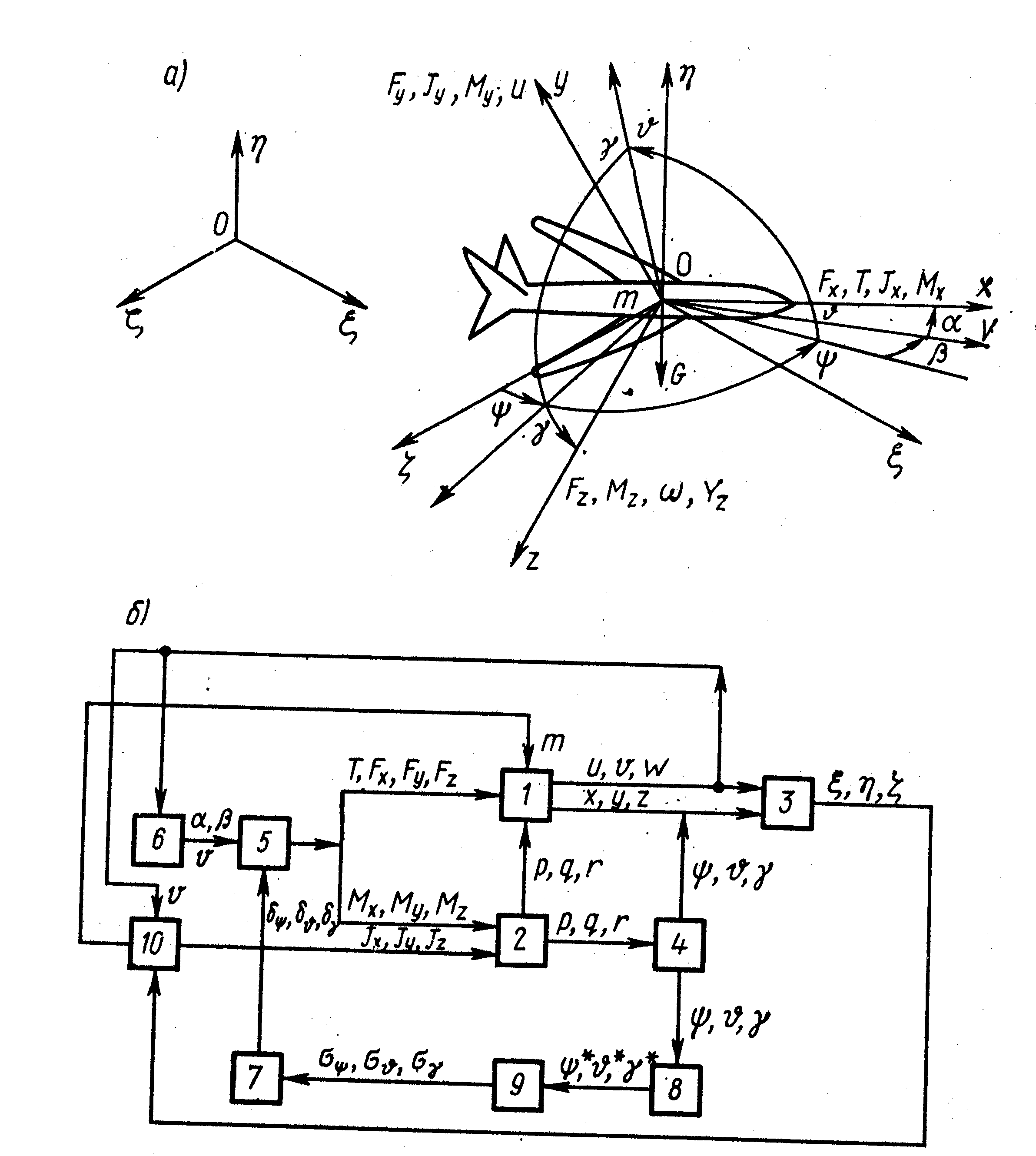
Рис.4.3. Структурная схема «полной» модели ЛА
Например, полные уравнения движения ЛА (рис. 4.3 а) представленные в виде схемы на рис. 4.3б, включают в себя: уравнения линейных перемещений ЛА как твердого тела относительно земной системы координатО, ξ, η, ζв трех взаимно перпендикулярных направлениях под действием сил тягиТ, аэродинамических силF(Fx, Fy, Fz) в поле тяжести с ускорениемG (блок1); уравнения поворотов относительно центра тяжести в трех направлениях под действием аэродинамических моментовM(МХ, My, Mz) (блок2); кинематические уравнения движения центра тяжести ЛА по отношению к земной системе координатξ ,η, ζ(блок3); кинематические уравнения вращения ЛА относительно центра тяжести на углы крена γ , тангажа ν и курса ψ (блок4); уравнения аэродинамических сил и моментов (блок5); уравнения скорости ΰ, углов скольжения β и атаки α ЛА (блок6); уравнения рулевых органов δγδψδθ(блок 7); уравнения устройств навигации (блок8) и БЦВМ (блок9); уравнения, определяющие изменения массыт и моментов инерции Jx,JY,Jz зависимости от потребления горючего (блок 10).
Этот далеко не полный перечень уравнений, соответствующих ММ ЛА, приводит в конечном счете к ММ в виде системы обыкновенных дифференциальных уравнений в форме Лагранжа (3.7) более чем 100-го порядка с несколькими тысячами членов.
В процессе проектирования САУ Л А такой полной ММ пользуются только на этапах испытаний всей САУ. Для многих проектных процедур расчета, анализа и синтеза САУ применяются упрощенные ММ в формах (3.15), (3.17), (3.16) и др., которые оказываются вполне достаточными для целей этих проектных процедур, но неизмеримо проще полной ММ. Так, при предварительном расчете траектории движения центра тяжести ЛА «О», по отношению к земной системе координат ξ ,η, ζрассматриваются уравнения блока 3, а остальные уравнения не учитываются; при расчете динамической устойчивости ЛА исследуются только уравнения блоков 2, 4, 8, 9, 7, причем с разделением на продольное и и боковое движения соответственно в вертикальной и горизонтальной плоскости, и т. д.; аналогичные упрощенные ММ применяются при проектировании ГСП.
Полная ММ ГСП целесообразна на этапах испытаний ГСП и в некоторых других проектных процедурах, а для большинства расчетных проектных процедур пользуются упрощенными ММ в виде трех несвязанных систем линейных уравнений в формах (3.15), (3.17).
На протяжении «жизненного цикла» проектируемого объекта требуется приводить его ММ в соответствие с непрерывно меняющейся информацией об этом объекте, т. е. постоянно решать задачу упрощения и преобразования форм в том или ином объеме.
Под упрощением математической модели в САПР будем понимать проектную процедуру П преобразования исходной математической модели М в упрощенную Мi эквивалентную М с точки зрения цели исследования.
Можно выделить следующие основные подходы к решению задачи упрощения ММ.
Редукция:
![]()
Исходная модель М последовательно редуцируется к упрощенным моделям Мiменьшей сложности С (Мi)- Эта процедура предполагает исключение не влияющих на результат исследований и расчетов составляющих ММ.
Декомпозиция:
![]()
Здесь, так же как и в (4.32), C(Mi)—некоторая мера сложности ММ (порядок системы уравнений, число слагаемых, числоарифметических операций, требуемая память, время счета и т. д.), Операция (4.33) предполагает возможность разбиения исходной ММ на ряд частных моделей. Применительно к задаче упрощения ММ это может соответствовать выделению п упрощенных моделей Мi , соответствующих п целям исследования. Ниже рассматриваются некоторые методы и вытекающие из них алгоритмы упрощения ММ.
Ряд алгоритмов строится на основе метода возмущений. Основоположником этой группы методов был А. Пуанкаре (французский математик и механик, 1854—1912),. впервые применивший метод возмущений для решения задач теории устойчивости.
Основой метода является положение, что некоторые динамические связи в модели могут игнорироваться, т. е. исходная модель может аппроксимироваться моделью, структура которой проще.
Рассмотрим применение метода возмущений к упрощению первого уравнения системы уравнений (3.15) в случае наличия в ней малого параметра ε>0. Если эту систему можно представить в виде

где А11, a12, А22, В1, В2— соответствующие блоки матриц А, В системы уравнений (3.15); Z1 Z2— векторы фазовых координат, то, очевидно, сложность ММ и вычислительные затраты при ε=0 сокращаются, так как система распадается на две независимые подсистемы меньшей размерности.
В случае приводимости уравнения (3.15) к виду
![]() (4.34)
(4.34)
при =0 второе уравнение вырождается в алгебраическое, т.е.
![]() (4.35)
(4.35)
![]()
Снижение сложности системы (4.35) по отношению к системе (4.34) здесь также очевидно.
Одна из особенностей ММ широкого класса САУ заключается в их нелинейности. Наиболее распространенным методом упрощения этих ММ является линеаризация (см. систему (3.11)). Во многих случаях линейная модель достаточно хорошо отражает физику работы исследуемой системы, а главное, позволяет применить мощный аппарат исследования линейных систем. Кроме того, хорошо известно стремление разработчика строить систему, «работающую» по линейной модели. С точки зрения требуемых аналитических операций при автоматизации этого метода необходимы элементарные подстановки, аналитическое дифференцирование, тождественные преобразования.
Ряд преимуществ с точки зрения машинной реализации имеют методы упрощения, сводящие дифференциальные уравнения к системам конечных, в частности алгебраических, уравнений.
Одним из таких методов является предложенный автором машинно-аналитический метод |[13]. Сущность его сводится к следующему. Пусть ММ задана в форме (3.7), которую представим здесь в виде

где F(Y, Λ, t)= [ f1(Y, Λ, t), f2(Y, Λ, t), ..., fn(Y, Λ, t) ]-задавая в области D вещественная функция от Y, Λ, t; Y(t)=[y1(t), y2(t),…, yn(t)]— вещественная вектор-функция из фазовых координат системы; Λ (t)-=[ λ1(t) λ2(t), ..., λn(t)] — вектор, составленный из параметров системы, включая входные сигналы и начальные условия. Полученные . на ЭВМ в результате численного решения системы (4.36) при заданных значениях параметров фазовые координаты обозначим Y(T). В соответствии с машинно-аналитическим методом (подробнее этот метод будет изложен в гл. 6) функции «машинные решения» исходной системы (4.36) аппроксимируютсяаналитическими функциями и представляются в виде
![]() (4.37)
(4.37)
где S = (s1, s2,…. sn)—вектор, составленный из характеристик процессов — параметров аппроксимирующих функций φ(t, S) (например, вектор из п, Ω в функциях ent, sinΩt, ent*sinΩt).
По исходным уравнениям (4.36) и аппроксимациям машинных решений (4.37) в результате определенного процесса последовательных приближений .(см. гл. 6) в аналитическом виде получается зависимость
![]() (4.38)
(4.38)
связывающая характеристики процессов в системе с ее параметрами. Эта зависимость представляет собой уже конечные уравнения, по которым значительно проще, чем по исходным дифференциальным (4.36), проводятся исследование и расчет САУ и их устройств.
Уравнения (4.38) могут быть также использованы для упрощения исходных дифференциальных (4.3.6) путем их редукции, т. е. исключения, «малозначащих» в смысле цели их применения членов уравнений, параметров. В этом случае по зависимости (4.38),
называемой
определяющим уравнением, при условии
![]() строится матрица чувствительности
характеристик процессов к изменению
параметров:
строится матрица чувствительности
характеристик процессов к изменению
параметров:
 (4.39)
(4.39)
Так как параметры
САУ имеют различные размерности и
значительные диапазоны изменения, то
удобнее пользоваться логарифмическими
или полулогарифмическими коэффициентами
чувствительности
![]() и
и![]()
![]() .
.
В соответствии с матрицей чувствительности (4.39) осуществляется редукция исходной модели (4.36) и построение k-го приближения упрощенной эквивалентной модели
![]()
При этом должны быть заданы диапазоны изменения и точность определения каждого из параметров исходной системы и критерий оценки близости исходной и эквивалентной моделей.
В качестве такого критерия выбирается математическое ожидание квадрата разности векторов YиYе
![]() (4.40)
(4.40)
в течение заданного промежутка времени
На рис. 4.6 приведена схема операций упрощения ММ на основе соотношений (4.36) — (4.40). Приведенные алгоритмы упрощения реализуются в САПР средствами специального ПОЯ «Упрощение и преобразование ММ» и соответствующего пакета программ*. Перейдем к изложению такого ПОЯ.
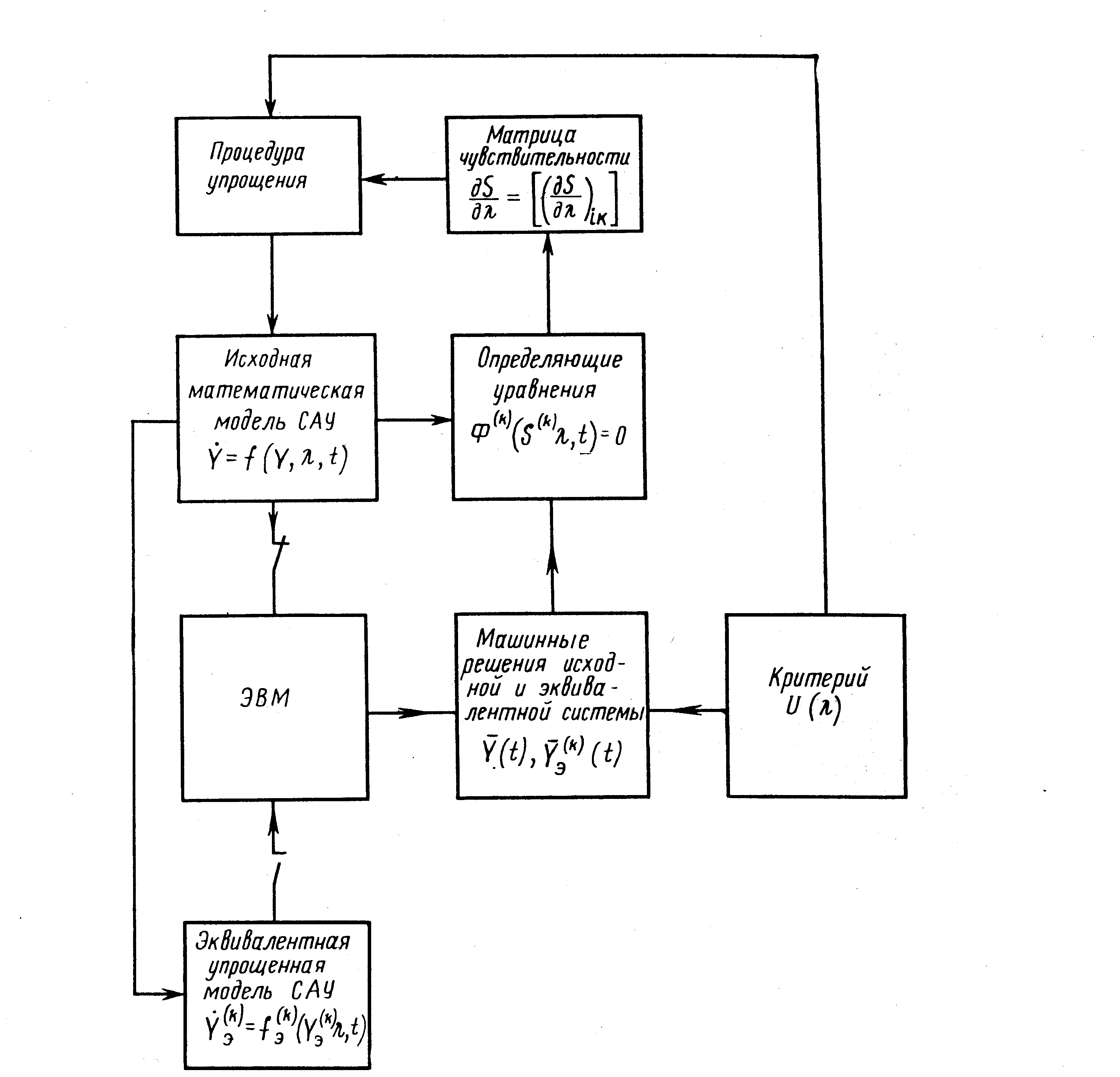
Рис.4.4. Схема операций при упрощении ММ
Программа на ПОЯ «Упрощение и преобразование ММ» представляет собой последовательность операторов, разделенных точкой с запятой. Основным понятием языка является понятие ММ, в качестве которой могут выступать следующие математические объекты:
— системы уравнений — дифференциальные, дифференциально-алгебраические, алгебраические;
— матрицы систем (3.11), (3.15), (3.16), матрица чувствительности (4.39);
— скалярные выражения, т. е. выражения энергий T, U, R в (4.29), характеристический полином (ХП), передаточная функция (ПФ). Первичными объектами являются уравнения, описывающие поведение системы и энергетические характеристики. Остальные объекты являются производными от первых.
Большинство операторов такого ПОЯ, выполняющих то или иное преобразование ММ, предполагает следующую структуру: вначале следует действие, обозначающее некую операцию над ММ (построить, привести, ...), затем признак математического объекта (матрица, уравнения, ... )и, наконец, проблемный признак (уравнения чувствительности, передаточная функция ...). Иногда присутствует указание на используемый метод, алгоритм и т. д. Операции могут производиться над некоторой «текущей» ММ.