Математическое обеспечение сапр.
Включает в себя:
математические модели
методы решения задач
алгоритмы
Разработка математических моделей процесс не формальный.
Математическая модель -соотношения, описывающие поведение объекта выведенные на основе законов механики, физики, химических законов и т.д., и удовлетворяющие требованиям точности. Модель должна быть адекватна объекту.
Методы решения –совокупность правил, позволяющих при заданных исходных данных получить нужный результат с использованием выше указанной модели.
Алгоритм-последовательность реализации метода в виде точных шагов которые должна осуществить ЭВМ с целью получения того же результата при заданных исходных данных.
Модели бывают:
макро модели
микро модели
динамические – описываются нелинейными дифференциальными уравнениями
статические - описываются нелинейными алгебраическими уравнениями, либо статическими нелинейными характеристиками. Из нелинейных уравнений можно получить линейные путем линеаризации.
детерминированные
стохастические
И детерминированные и стохастические модели зависят от вида входного воздействия. Стохастические – это когда на систему действует полезный детерминированный или случайный сигнал и случайная помеха.
• стационарные – не зависят от времени
• нестационарные – хотя бы один параметр зависит от времени
• с сосредоточенными параметрами
• с распределенными параметрами
Стационарные линейные детерминированные модели систем с сосредоточенными параметрами.
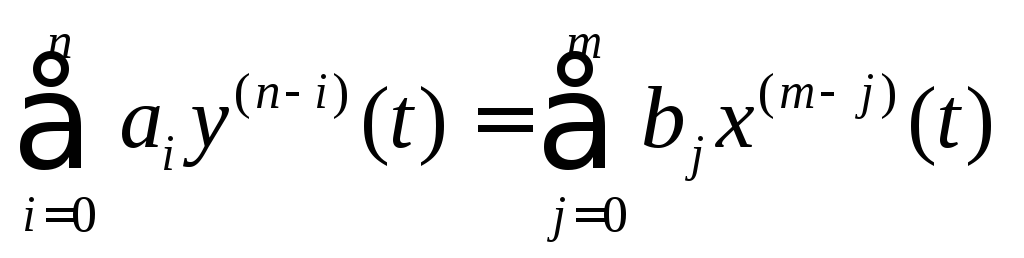 (1)
(1)
Дифференциальное уравнение, которое описывает поведение линейных систем имеет вид (1).
![]() - (импульсная и
переходная) характеристика может быть
найдена путем решения уравнения (1) при
нулевых начальных условиях, при
подстановке
- (импульсная и
переходная) характеристика может быть
найдена путем решения уравнения (1) при
нулевых начальных условиях, при
подстановке
![]() ,
при
,
при![]() .
.
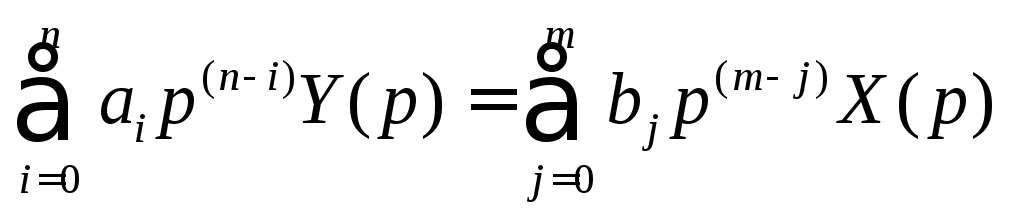
Для определения переходной функции для линейной системы уравнения (1) можно воспользоваться теоремой дифференцирования оригинала при нулевых начальных условиях.
Умножаем на р или рn
Передаточная функция в виде дробно – рационального выражения;

Частотные характеристики, полученные по передаточной функции

![]() *
*

Для осуществления операции * на практике для дробно – рациональной функции вида (3), используют теорему разложения Хевисайда.
Если у нас
 ,
то для такого изображения оригинал
выглядит:
,
то для такого изображения оригинал
выглядит:
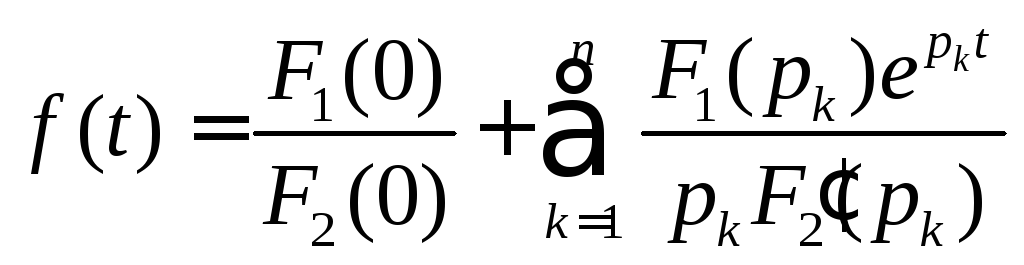
где
![]() - корни
- корни![]()
В том случае, если корни кратные, то формула имеет вид:

Где рк– корни А(р)=0
n– число разных корней
mк– кратность корней рк


Переход от дифференциальных уравнений n – ого порядка к нормальной форме Коши
Дифференциальное уравнение имеет вид:
![]()
![]() -
определение выходной величины
-
определение выходной величины
![]() –промежуточная
переменная
–промежуточная
переменная
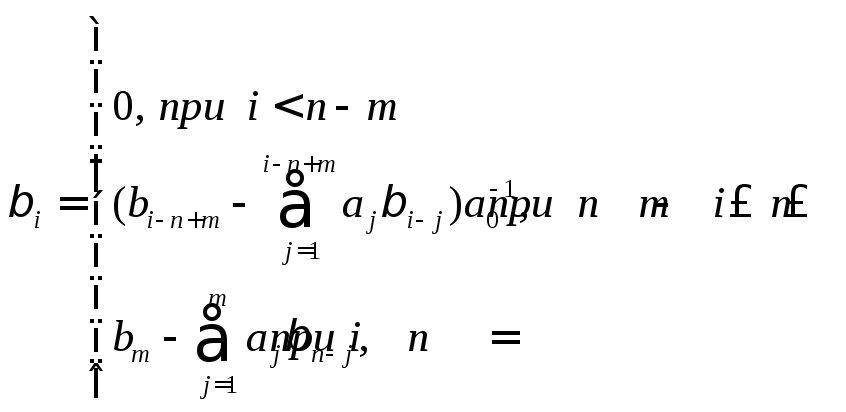
Коэффициенты
![]()
При этом система в форме Коши представляется в виде:
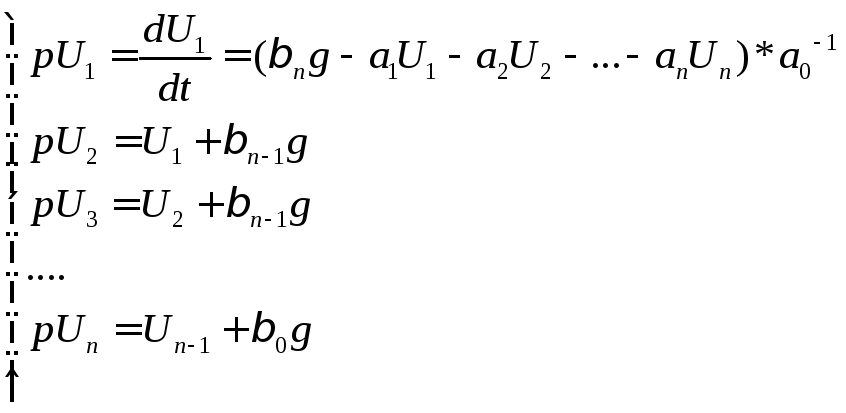
![]() -интересующая нас переменная
-интересующая нас переменная
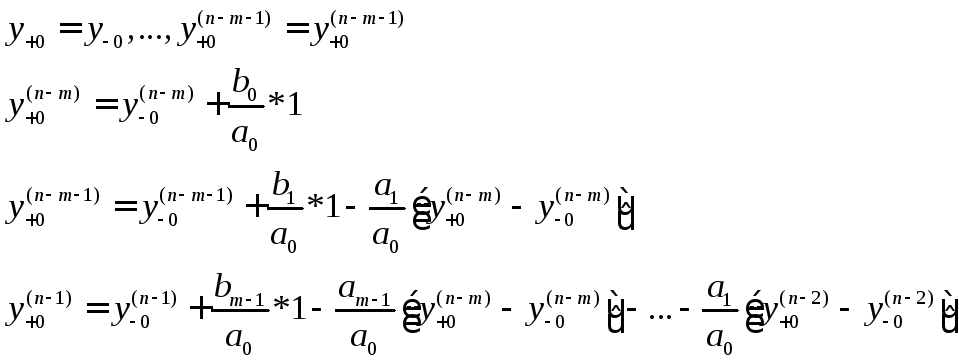
Эквивалентные начальные условия САР после воздействия на нее 1(t):
Исходное дифференциальное уравнение:
![]()
где
![]() -
единичное ступенчатое воздействие
-
единичное ступенчатое воздействие
![]() –начальное условие
имеющее место перед приложением 1(t)
–начальное условие
имеющее место перед приложением 1(t)
![]() -
начальное условие имеющее место
после приложения 1(t)
-
начальное условие имеющее место
после приложения 1(t)