

§ 7.3. Подсистема сапр сау «Синтез»
Подсистема «Синтез» включает в себя соответствующие компоненты обеспечении САПР. Технические средства, методическое и организационное обеспечения совпадают с соответствующими компонентами подсистемы «Анализ». Информационные компоненты помимо ММ включают в себя набор критериев и функционалов. Программное и лингвистическое обеспечения отличаются от соответствующих компонентов подсистем САПР САУ «Моделирование», «Анализ» и других составом и содержанием операторов и большей сложностью процедур.
В основу построения подсистемы «Синтез» положена последовательность процедур синтеза, представленная на рис. 7.5. В соответствии с этой последовательностью пакеты программ «Синтез» включают наряду с пакетами программной реализации синтеза структуры и параметров регуляторов САУ соответствующие пакеты, реализующие машинно-аналитический метод, процедуры численного интегрирования, оптимизации, обработки.
Методы нлп
![]() - эта формула
относится к любому шаговому методу
- эта формула
относится к любому шаговому методу
где
a– величина шага смещения
Еi+1– случайный единичный вектор
![]()

Задача нлп
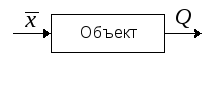
![]() minQ(x1,…,xn)
– зависит от многих переменных
minQ(x1,…,xn)
– зависит от многих переменных
1) – параметрические ограничения
2![]() )
)![]() ,
,
Q![]() – критерий показателя качества,
образуется следующим образом:
– критерий показателя качества,
образуется следующим образом:
,
q*- частное значение
![]()
Градиентный метод оптимизации
Если оптимизируемая функция Qнеизвестна, или известна не полностью и есть возможность вычислитьQв отдельных точках, то
процесс определения оптимального значения Qсвязан с экспериментом, ибо только с помощью него можно получить информацию о поведении функции. Такого рода функции встречаются не только в тех случаях, когда система является социальной, экономической, но и в тех случаях, когда значениеQвычисляется на ЭВМ.
Нам надо найти последовательность независимых переменных, которые обеспечивают минимум функции:
![]()
Несмотря на то, что большинство методов оптимизации предназначены для решения задач без ограничений, учет ограничений не представляет сложностей и в большинстве задач осуществляется с помощью метода штрафных функций или с использованием метода барьеров, которые позволяют свести задачу с ограничениями к задаче без ограничений.
Трудности связанные
с градиентным методом возникают при
наличии в области допустимых значений
![]() нескольких экстремумов.
нескольких экстремумов.
Метод градиента
Определяется направление градиента в точке
 :
:
Осуществляется перемещение из точки
 в точку
в точку в соответствии с формулой:
в соответствии с формулой:

В точке
 определяется
направлением градиента:
определяется
направлением градиента:
![]() ;
осуществляется переход в точку
;
осуществляется переход в точку
![]() и т.д. до тех пор, пока не будут выполнены
критерии поиска.
и т.д. до тех пор, пока не будут выполнены
критерии поиска.
1)
 вычислений:n+1
вычислений:n+1
![]() - величина пробного
поискового шага
- величина пробного
поискового шага
2)
 вычислений: 2n
вычислений: 2n
Быстрота сходимости
процесса поиска минимального Qи его точность существенно зависят от
величины рабочего шага![]() ;
для увеличения скорости перемещения
вдали от минимумаQ,
;
для увеличения скорости перемещения
вдали от минимумаQ,![]() целесообразно
выбирать большим, по мере приближения
к минимуму шаг уменьшать. Для разумного
сочетания скорости и точности алгоритма
поиска надо грубый и точный поиск, для
этого необходимо задаться положительными
константами
целесообразно
выбирать большим, по мере приближения
к минимуму шаг уменьшать. Для разумного
сочетания скорости и точности алгоритма
поиска надо грубый и точный поиск, для
этого необходимо задаться положительными
константами![]() и
условиться, что если
и
условиться, что если![]() ,
то поиск считается грубым, а если
,
то поиск считается грубым, а если![]() ,
то
,
то![]() ,
а если
,
а если![]()
Условия окончания поиска:
По ресурсу
Пробные приращения из точки x*приводят к

