

1.2.5 Тензор напруг. Найбільші дотичні напруження
Через будь-яку точку тіла
можна провести нескінченне число похилих
площадок. З (1.4) слідує, що для визначення
напруг на довільній похилій площадці
досить знати напруги на трьох взаємно
перпендикулярних площадках. Отже,
дев'ять складової напруги, з яких тільки
шість (![]() ) різні, повністю визначають напружений
стан тіла в точці.
) різні, повністю визначають напружений
стан тіла в точці.
На кожній координатній
площадці три складові утворять вектор
повної напруги: на площадці з нормаллю
—
вектор
![]() на площадці з нормаллю
на площадці з нормаллю
![]() —
—![]() , на площадці з нормаллю
, на площадці з нормаллю
![]() —
—![]() .
.
Сукупність трьох векторів
![]() ,
обумовлених дев'ятьма складовими, які
при зміні координатних осей перетворяться
відповідно до (1.4), називається аффінним
ортогональним тензором другого рангу
(тензором першого рангу є вектор).
,
обумовлених дев'ятьма складовими, які
при зміні координатних осей перетворяться
відповідно до (1.4), називається аффінним
ортогональним тензором другого рангу
(тензором першого рангу є вектор).
Тензор, компонентами якого є напруги, описує напружений стан у точці тіла, називається тензором напруг і записується у вигляді матриці:
|
(1.18) |
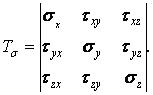
В силу закону парності дотичних напружень, тензор напруг є симетричним.
Так як у кожній точці тіла буде свій тензор напруг, то в тілі є поле тензорів напруг.
Тензори можна складати й віднімати, при цьому сумою двох тензорів є тензор, компоненти якого являють собою суму відповідних компонентів тензорів, що складаються.
При множенні тензора на
скалярну величину
![]() вийде новий тензор, усі компоненти якого
в
раз більші компонентів вихідного
тензора.
вийде новий тензор, усі компоненти якого
в
раз більші компонентів вихідного
тензора.
Розглянемо напружений стан, при якому на трьох взаємно перпендикулярних площадках діють тільки три однакових головних напруги
|
(1.19) |

Такий напружений стан описується тензором
|
(1.20) |
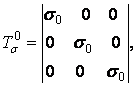
який називається кульовим тензором напруг.
Якщо в системі координат, що
співпадає з головними осями, для кожної
площадки, що проходить через початок
координат, побудувати вектор повної
напруги
![]() то кінці цих векторів опишуть поверхню
еліпсоїда, що називається еліпсоїдом
напруг або еліпсоїдом
Ламі.
то кінці цих векторів опишуть поверхню
еліпсоїда, що називається еліпсоїдом
напруг або еліпсоїдом
Ламі.
Три півосі такого еліпсоїда рівні по довжині трьом головним напругам. При напруженому стані, що описується кульовим тензором (1.20), три головних напруги однакові й еліпсоїд переходить в кулю.
Кульовий тензор можна представити у вигляді
|
(1.21) |
де
![]() — одиничний тензор:
— одиничний тензор:
|
(1.22) |
 .
.При вирахуванні кульового тензора (1.20) з тензора напруг (1.18) отримуємо новий тензор, що називається девіатором напруг:
|
(1.23) |

Таким чином, тензор напруг у будь-якій точці тіла може бути представлений у вигляді суми кульового тензора й девіатора напруг:
|
(1.24) |
Кульовий тензор виділяє з напруженого стану рівномірне всебічне розтягання (стиск), при якому змінюється тільки об’єм даного елемента без зміни його форми. Девіатор напруг характеризує стан зсуву, при якому змінюється форма елементу без зміни його об’єму.
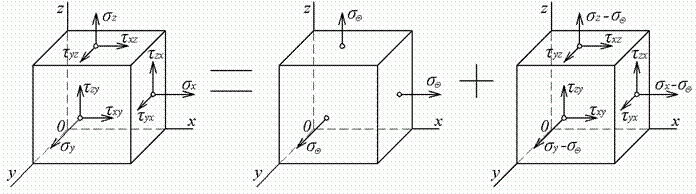
Рис.1.3. Кульовий тензор і девіатор напруг
Інваріанти напруженого стану (1.17) можна розглядати, такими що складаються з компонентів тензора напруг, тому їх інакше називають інваріантами тензора напруг.
Інваріанти девіатора напруг можна побудувати по аналогії з інваріантами тензора напруг.
Перший інваріант девіатора напруг
![]()
Другий інваріант девіатора напруг

Після підстановки середньої напруги (1.19) і перетворень одержимо
|
(1.25) |
Другий інваріант девіатора напруг відіграє важливу роль у теорії пластичності, де розглядається величина, пропорційна кореню квадратному із цього інваріанта, яку називають інтенсивністю дотичних напружень:
|
(1.26) |
Величина (1.26) являє собою дотичне напруження на октаедричних площадках, тобто на площадках, рівнонахилених до всім трьох головним напругам.
Поряд з (1.26) часто розглядається величина, яка називається інтенсивністю напруг:
|
(1.27) |
Коефіцієнт в (1.27) обраний так, щоб при простому розтяганні інтенсивність напруг дорівнювала нормальній напрузі.
Відомо, що для кожної сукупності площадок, паралельним трьом головним напругам, можна знайти екстремальні значення дотичних напружень
|
(1.28) |
Напруги (1.28) називаються головними дотичними напруженнями.
Максимальним з них є
|
(1.29) |
Введемо також поняття напрямного тензора напруг. Під цим розуміється девіатор напруг, кожний компонент якого розділений на інтенсивність дотичних напружень:
|
(1.30) |
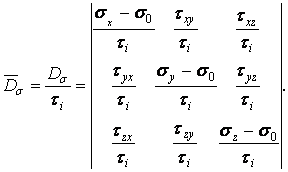
Напрямний тензор напруг визначає тільки головні напрямки напруг і співвідношення між компонентами тензора напруг, але не визначає їхнього значення, тому що компоненти напрямного тензора є безрозмірними величинами.