

Теория систем автоматического управления. В.А. Бесекерский, Е.П. Попов, 1975
.pdf (23.30)
(23.30) (23.31)
(23.31) (23.32)
(23.32) (23.33)
(23.33)
Поскольку х1 = х, х2 = dxdt , то указанная линия переключения представляет собой определенную зависимость
 (23.34)
(23.34)
вследствие чего уравнение преобразовательной части системы можно представить в прежнем виде (23.26), но с новым значением .Устройство измерительнопреобразовательной части системы, согласно этому нелинейному закону регулирования, будет здесь аналогично прежнему (пример 1), но с другим алгоритмом вычислений. Замечания. Сделаем некоторые общие замечания для оптимальных по быстродействию систем с линейной стационарной заданной частью без внешнего воздействия. В обоих примерах рассматривались системы второго порядка. Для них были получены линии переключений. Для систем высокого порядка будут получаться поверхности переключения в многомерном фазовом пространстве. При этом, если заданная часть системы n-го порядка имеет только вещественные неположительные корни (включая нулевые), то процесс будет иметь не более n— 1 переключений, а если имеются комплексные (включая чисто мнимые) корни, то переключений может быть и больше, в зависимости от начальных условий.
Оптимальная по быстродействию система имеет релейный переключающий элемент, управляемый с помощью специального вычислительного логического устройства, алгоритм работы которого тем сложнее, чем выше порядок системы. При этом требуется непрерывно измерять все n фазовых координат или же, иначе, — регулируемую величину и n— 1 ее производных для введения в вычислительное устройство. Для систем высокого порядка это далеко не всегда реально. Поэтому практически прибегают к созданию не строго оптимальных систем, а систем, близких к оптимальным, но проще реализуемых. Некоторые конкретные рекомендации по таким системам см. в книге [61], стр. 474 — 477.
§ 23.3. Последовательная оптимизация на базе нелинейного программирования
Изложим этот метод, следуя В. М. Пономареву [105]. Рассмотрим более общий случай системы, описываемой нелинейными уравнениями динамики
 (23.35)
(23.35)
с переменными коэффициентами, с внешними воздействиями fi(t), которые могут иметь случайную природу при заданном распределении, и с начальными условиями
 (23.36)
(23.36)
которые также могут быть случайными с заданным распределением. Рассматривается конечное время процесса управления
Нужно найти оптимальный нелинейный закон регулирования
 (23.37)
(23.37)
при котором осуществляется минимум функционала (критерий оптимальности)
 (23.38)
(23.38)
где М обозначает математическое ожидание, причем должны еще удовлетворяться необходимые ограничения на некоторые переменные и характеристики, обусловленные практической реализацией системы.
Представим нелинейные функции ϕi , ui , Н в виде степенных рядов степени l. Заданные функции ϕi будут
 (23.39)
(23.39) (23.40)
(23.40) (23.41)
(23.41) (23.42)
(23.42) (23.43)
(23.43) (23.45)
(23.45) (23.46)
(23.46) (23.47)
(23.47)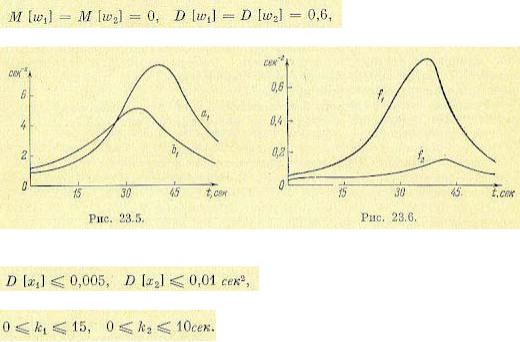
Вводятся ограничения на управление:
 (23.46)
(23.46)
Такая задача является типичной, например, для летательных аппаратов при ограничении угла отклонения руля и скорости его движения.
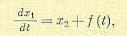
Задано: с1 = —10 сек-1, с2 = 25 сек-1, v1= 0,3 рад, v2 =1 рад/сек. Переменные коэффициенты a1(t) и b1 (t) заданы в виде графиков (рис. 23.5). Возмущающее воздействие f(t) является случайным и описывается каноническим разложением
 (23.49)
(23.49)
где случайные величины w1 и w2 имеют следующие математические ожидания и дисперсии:
а так называемые координатные функции f1 (t) и f2 (t) заданы графически (рис. 23.6).
Дополнительно к этому вводятся еще ограничения на фазовые координаты движения объекта по траектории
а также на коэффициенты k1 и k2 в виде
Ставится задача отыскания значений коэффициентов нелинейного закона управления k1, k2, k3, оптимизирующих систему по критерию точности (минимальная ошибка);
 (23.50)
(23.50)
и вторая задача — отыскания значений тех же коэффициентов, оптимизирующих систему по энергетическому критерию (минимум затраты энергии на управление):
 (23.51)
(23.51)
Результаты решения первой задачи оптимизации описанным выше алгоритмическим методом, проведенного на ЦВМ, даны в табл. 23.1.
В этой таблице показано не только как меняются значения самих коэффициентов k1, k2, k3 на каждом шаге последовательной оптимизации, но и то, как меняется, постепенно уменьшаясь, дисперсия ошибки (отклонения объекта) D[х1] в конце управляемого движения (t= tк), а также и величина минимизируемого функционала Iт.
Решение второй задачи оптимизации — по энергетическому критерию (23.51) — приводит к следующим результатам (табл. 23.2);
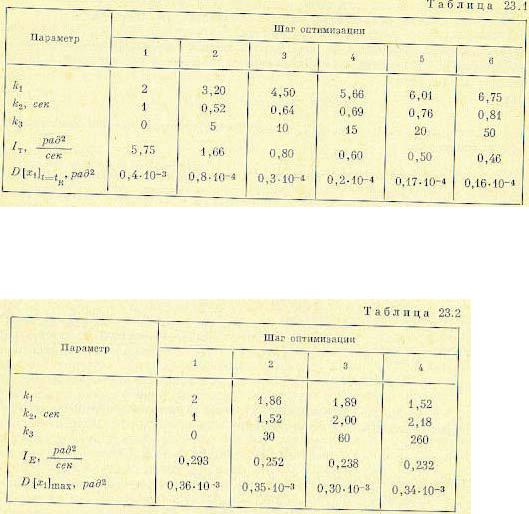
Из таблицы видно, что коэффициенты k1, k2, k3 нелинейного оптимального закона в этом случае существенно отличаются от первого в основном за счет увеличения коэффициента k3 при кубическом члене выражения нелинейной функции (23.47) и уменьшения коэффициента k1. Видно также, что точность управления при минимизации затраты энергии ухудшается.
В заключение отметим, что описанным здесь методом последовательной оптимизации на базе нелинейного программирования с использованием ЦВМ могут решаться задачи синтеза оптимальных систем большой сложности, в том числе многомерных, с уравнениями высокого порядка и с произвольными видами внешних воздействий и налагаемых практикой ограничений при различных критериях оптимальности.
РАЗДЕЛ V
ЦИФРОВЫЕ И АДАПТИВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
ГЛАВА 24 СИСТЕМЫ РЕГУЛИРОВАНИЯ С ЦИФРОВЫМИ ВЫЧИСЛИТЕЛЬНЫМИ
МАШИНАМИ
§ 24.1. Общие понятия
Использование цифровых вычислительных машин (ЦВМ) для управления автоматизированными объектами имеет большие перспективы. Это объясняется значительными вычислительными и логическими возможностями ЦВМ, что позволяет реализовывать сложные алгоритмы управления.
Включение цифровой вычислительной машины в систему автоматического регулирования требует рассмотрения двух групп вопросов.
К первой группе относятся вопросы, связанные с проектированием л реализацией самой ЦВМ, а также ее входных и выходных устройств (преобразователей), задачей которых является преобразование непрерывных физических величин к цифровому виду и обратно.
Ко второй группе относятся вопросы, связанные с изучением влияния дискретного характера выходных сигналов ЦВМ на динамические свойства системы автоматического регулирования. Дальнейшее изложение будет касаться именно этой группы вопросов.
Как правило, целесообразно вводить ЦВМ в систему регулирования в тех случаях, когда требуется сложная обработка поступающей информации. Так, например, в системах управления движущимися объектами необходимо производить сложные вычисления, связанные с операциями преобразования координат, решение прямоугольных и сферических треугольников, счисление пути и т. п. В системах управления сложными производственными объектами, например доменными печами, автоматизированными линиями и т. п., приходится производить большой объем логических операций _
Ввиду сравнительно большой сложности ЦВМ включение ее в состав автоматизированной системы оправдывается тогда, когда на ЦВМ возлагается решение ряда задач с обслуживанием нескольких зависимых или независимых каналов управления.
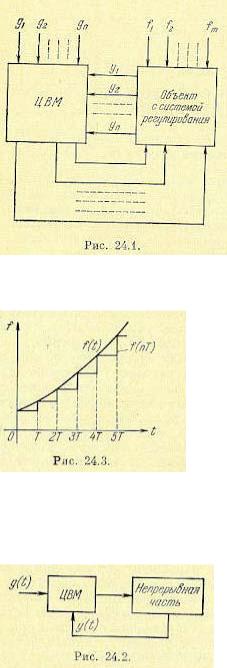
Общий случай системы регулирования с ЦВМ изображен на рис. 24.1. Здесь g1, g2, g3, . . ., gn представляют собой задающие воздействия, в функции которых ЦВМ вырабатывает регулирующие воздействия, прикладываемые к системе регулирования; y1, y2,y3…,yn являются регулируемыми величинами, а f1, f2, f3, . . ., fn — возмущающими воздействиями.
По своему принципу действиям ЦВМ является вычислительным устройством дискретного действия. Поэтому и система регулирования с ЦВМ представляет собой дискретную систему.
Ввиду того, что рассмотрение системы со многими переменными (рис. 24.1) представляет собой весьма громоздкую задачу, ограничимся случаем, когда ЦВМ вводится в одиночный контур регулирования с одной регулируемой величиной у и одним задающим воздействием g. Во многих случаях задача исследования системы с ЦВМ может быть сведена к рассмотрению таких одиночных контуров (рис. 24.2).
Принцип работы ЦВМ заключается в том, что возложенные на нее математические действия она производит в дискретные моменты времени t = 0, Т, 2Т, 3Т и т. д., где Т — период повторения ЦВМ. В интервалах между решениями на выходе ЦВМ сохраняется то Решение, которое было получено в начале рассматриваемого интервала. Поэтому непрерывная функция f(t) заменяется на выходе ЦВМ ступенчатообразной функцией f [nТ] в соответствии с рис. 24.3. Эта функция и прикладывается к непрерывной части системы регулирования (рис. 24.2).
В интервалах между решениями на выходе ЦВМ возможна также экстраполяция предыдущих решений по линейной, квадратичной и т. д. зависимостям. Сохранение предыдущего решения, указанное выше, соответствует использованию экстраполятора нулевого порядка. Этот случай и будет рассматриваться в дальнейшем.
Процесс превращения непрерывной функции в ступенчатую (рис. 24.3) соответствует квантованию по времени. Вследствие цифрового представления непрерывной величины в цифровой вычислительной машине имеет место также процесс квантования по уровню. Последнее объясняется тем, что цифровое представление

допускает только вполне определенные фиксированные уровни сигналов, отличающиеся друг от друга на единицу младшего разряда.
Квантование по времени делает всю систему регулирования дискретной, а квантование по уровню — нелинейной. В дальнейшем изложении будем вначале предполагать, что влиянием квантования по уровню можно пренебречь. Это делает всю систему линейной и дает возможность использовать для ее расчета аппарат, развитый для исследования импульсных систем (глава 15). Влияние квантования по уровню будет рассмотрено отдельно в § 24.4.
Дискретные передаточные функции. Непрерывная часть системы, на входе которой действует ступенчатая функция f[nТ], изображенная на рис. 24.3, носит название фильтра с фиксацией или фильтра с запоминанием.
Для исследования подобных систем может использоваться аппарат г-преобразования и его модификации. Разница будет заключаться только в получении исходной дискретной передаточной функции разомкнутой системы W(z), т. е. дискретной передаточной функции фильтра с фиксацией. Дальнейшие исследования могут производиться в соответствии с изложенным выше для импульсных схем.
Дискретный элемент, каким является ЦВМ, генерирует импульсы, длительность которых равна периоду повторения Т. В связи с этим можно воспользоваться формулой (15.139), если положить в ней τ = 0:
 (24.1)
(24.1)
где h0(t) — переходная функция непрерывной части (рис. 24.2), а F0 (z) является z- преобразованием переходной функции Н0 (1).
Таким образом, отыскание передаточной функции разомкнутой дискретной системы с запоминанием сводится к отысканию переходной функции разомкнутой непрерывной части, переходу от нее к г-преобразованию, что может быть сделано по таблицам, и
умножению полученного результата на z −z 1 .
Формула (24.1) может быть представлена также в другом виде. Переходная функция h0(t) является преобразованием Лапласа от передаточной функции непрерывной части W0(р) деленной на р:
 (24.2)
(24.2)
Поэтому формулу (24.1) можно символически записать в виде
 (24.3)
(24.3)
где Z, означает z-преобразование от изображения Лапласа, находящегося в квадратных скобках.
Пусть передаточная функция непрерывной части статической системы регулирования в разомкнутом состоянии может быть представлена в виде
 (24.4)
(24.4)
Разложим ее на простые дроби:
где αi = 1 , а Ni и Ri =NiTi— коэффициенты, определяемые в соответствии с
Ti
теоремой разложения (см. § 7.4).
 (24.5)
(24.5) (24.6)
(24.6) (24.7)
(24.7) (24.8)
(24.8) (24.9)
(24.9) (24.10)
(24.10) (24.11)
(24.11)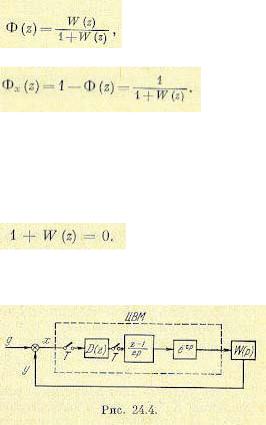
где ξ = Tτ — относительное запаздывание, ε = 1- ξ , W1(z,ε ) — смещенное z-
преобразование для переходной функции h0 (t), определяемое по табл. 15.1.
Исследование устойчивости и качества регулирования. После нахождения дискретной передаточной функции разомкнутой системы W(z) дальнейшее исследование производится в соответствии с главой 15. Для этой цели может быть найдена дискретная передаточная функция замкнутой системы (15.143):
и дискретная передаточная функция по ошибке (15.144):
Условие применимости формул (15.143) и (15.144) сводится здесь к тому, чтобы начальное значение переходной функции непрерывной части равнялось нулю, т. е. hо(0)=0. Это будет выполняться в том случае, когда степень числителя передаточной функции непрерывной части W0 (р) меньше степени знаменателя.
Как и в импульсных системах, условием устойчивости замкнутой системы будет | zi | < 1, где zi — корни характеристического уравнения (15.158):
Точность системы может определяться по коэффициентам ошибок (15. 171), а быстродействие и запас устойчивости — построением переходного процесса или частотными методами (см. главу 15).
На основании изложенного можно представить структурную схему системы регулирования с ЦВМ следующим образом. Вне зависимости от сложности решаемых математических задач можно считать, что ЦВМ определяет разность между необходимым значением регулируемой величины и действительным значением, т. е. ошибку х = g— у. В функции этой ошибки ЦВМ должна прикладывать к системе регулирования управляющее воздействие. Поэтому для исследования динамики следует
пользоваться структурной схемой (рис. 24.4), в которой ЦВМ условно введена последовательно в цепь вычисления ошибки. В общем случае в контуре регулирования может присутствовать элемент чистого временного запаздывания, выделенный в
отдельное звено с передаточной функцией e−τp .
Эффекты запоминания на период интегрирования весовой функции (рис. 24.3), определяемые формулами (24.1) и (24.3), учитываются также отдельным звеном с передаточной функцией
 (24.12)
(24.12)
где z= e−τp .
Если кроме определения ошибки х = g — у ЦВМ производит интегродифференциальные операции, то в контуре будет также присутствовать дискретная передаточная функция D(z), соответствующая некоторому дискретному фильтру, разностное уравнение которого может быть получено из D(z) на основании (15.96) и (15.98).