

Теория систем автоматического управления. В.А. Бесекерский, Е.П. Попов, 1975
.pdfизвестных дифференцирующих звеньев (см., например, рис. 4.23 и 4.24). Поэтому практически может быть получена не полная, а частичная инвариантность. Это соответствует введению ограниченного числа первых членов разложения (9.36).
Так, например, введением первой производной от задающего воздействия в системе с астатизмом первого порядка можно получить равной нулю скоростную ошибку, т. е. повысить степень астатизма относительно задающего воздействия на единицу. Вводя первую и вторую производные (даже приближенно), можно повысить степень астатизма на два и т. д. Это дает обращение в нуль соответствующих коэффициентов ошибки (8.20).
Внекоторых случаях сигнал по задающему воздействию может вводиться не непосредственно на "вход системы, как это показано на рис. 9.10, а в некоторую точку внутри канала регулирования (рис. 9.11).
Вэтом более общем случае эквивалентная передаточная функция замкнутой системы будет иметь, вид
 (9.37)
(9.37)
Эквивалентная передаточная функция по ошибке
 (9.37)
(9.37)
Эквивалентная передаточная функция разомкнутой системы
 (9.38)
(9.38)
Условие полной инвариантности
(9.39)
В качестве примера рассмотрим следящую систему (см. рис. 6.4) при введении регулирования по первой производной от угла поворота командной
оси, которое осуществляется при помощи тахогенератора. Электромеханическая и структурная схемы для этого случая изображены на рис. 9.12.
В соответствии с общим случаем, изображенным на рис. 9.11, имеем:
Эквивалентная передаточная функция замкнутой системы (9.37)
где - постоянная времени цепи первой производной от угла поворота командной
оси.
Эквивалентная передаточная функция по ошибке (9.38)
Скоростная ошибка будет равна нулю в том случае, когда в числителе последнего выражения будет равен нулю коэффициент при операторе в первой степени. Отсюда получаем условие частичной инвариантности (ликвидация скоростной ошибки):
 (9.39)
(9.39)
Из (9.39) можно найти эквивалентную передаточную функцию разомкнутой системы:
При выполнении условия (9.41) эквивалентная передаточная функция разомкнутой системы будет соответствовать астатизму второго порядка:
где  - добротность системы по ускорению,
- добротность системы по ускорению,  - эквивалентная постоянная времени.
- эквивалентная постоянная времени.
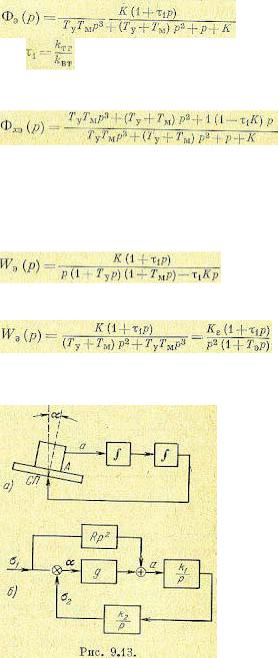
В качестве второго примера рассмотрим инерциальную вертикаль (рис. 9.13, а). Принцип работы ее заключается в том, что, акселерометр А воспринимает ускорение перемещения подвижного объекта, на котором установлена стабилизированная платформа (СП), и составляющую ускорения силы тяжести, возникающую при наклоне этой платформы на некоторый угол а (ошибка вертикали). Таким образом, акселерометр определяет ускорение
 (9.42)
(9.42)
где g — ускорение силы тяжести, R — радиус Земли, σ1 — путь, пройденный объектом по Земле, в дуговых единицах.
Это ускорение дважды интегрируется и поступает на стабилизированную платформу, которая поворачивается на угол
 (9.43)
(9.43)
где k1 и k2 — коэффициенты передачи первого и второго интеграторов.
К этим двум уравнениям необходимо добавить связь между ошибкой вертикали а, пройденным путем в дуговых единицах σ1 и углом поворота стабилизированной платформы σ1:
 (9.44)
(9.44)
Для рассмотренных уравнений (9.42) — (9.44) инерциальной вертикали изобразим структурную схему (рис. 9.13, б). Сравнивая ее с рис. 9.11, можем записать:
 (9.45)
(9.45)
 (9.46)
(9.46)
 (9.47)
(9.47)
Условие полной инвариантности (9.40)
откуда следует, что должно быть выполнено равенство  передаточная функция разомкнутой системы
передаточная функция разомкнутой системы
 (9.48)
(9.48)
а передаточная функция по ошибке будет тождественно равна нулю: Фxэ (p) = 0. Следовательно, при любых движениях объекта, на котором установлена инерциальная вертикаль, ошибка вертикали будет равна нулю. Это будет справедливым в том случае, если выполнены нулевые начальные условия, т. е. отсутствует свободное движение вертикали под действием начальных условий, и в случае, когда можно считать, что достаточно точно выполняется
требуемое условие  .
.
Заметим, что в рассмотренном случае особенно важно иметь нулевые начальные условия вследствие того, что передаточной функции (9.48) соответствует характеристическое уравнение
Оно имеет чисто мнимые корни
 (9.49)
(9.49)
 (9.50)
(9.50)
где Ω0 — частота незатухающих колебаний инерциальной вертикали, которой соответствует период  , называемый периодом Шулера. При наличии ненулевых начальных условий в системе будут устанавливаться незатухающие колебания с частотой Ω0, что будет нарушать работу вертикали.
, называемый периодом Шулера. При наличии ненулевых начальных условий в системе будут устанавливаться незатухающие колебания с частотой Ω0, что будет нарушать работу вертикали.
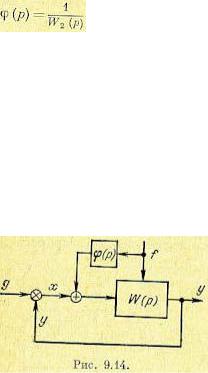
Комбинированное управление может быть использовано также для снижения ошибки от возмущающего воздействия (рис. 9.14). В этом случае наряду с регулированием по отклонению х(t) используется регулирование по возмущающему воздействию f(t). Передаточная функция по возмущению здесь будет иметь вид
 (9.51)
(9.51)
где WF (р) — передаточная функция по данному возмущению в разомкнутой системе, W (р) — передаточная функция разомкнутой системы.
Условие полной инвариантности может быть получено, если положить ФF (р) = 0. Тогда
 (9.52)
(9.52)
Эта функция также может быть представлена в виде ряда, аналогично формуле (9.36):
 (9-53)
(9-53)
где а0 — безразмерное число (1 или 0), kF — некоторый коэффициент, размерность которого совпадает с размерностью передаточной функции WF (р).
Как и в случае использования регулирования по задающему воздействию, получение полной инвариантности затрудняется необходимостью вводить первую и более высокие производные от возмущения f(t). Поэтому используется, как правило, частичная инвариантность, получающаяся при реализации в системе регулирования первых членов разложения (9.53). Это в свою очередь дает обращение в нуль соответствующих первых коэффициентов ошибки по возмущению (с0, с1, с2 и т. д.).
В заключение заметим, что возможно использование комбинированных систем с введением регулирования по нескольким возмущающим воздействиям и получением полной или частичной инвариантности по каждому из них. Однако это приводит, конечно, к усложнению схемы.
§ 9.3. Неединичные обратные связи
Неединичные обратные связи применяются для уменьшения ошибки, вызванной задающим воздействием в замкнутой системе регулирования.
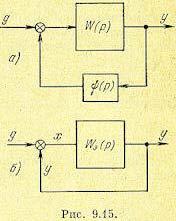
Рассмотрим структурную схему, изображенную на рис. 9.15. В отличие от обычной схемы регулируемая величина у (t) поступает на сравнение в чувствительный элемент по главной обратной связи с передаточной функцией, не равной единице, т. е.  .
.
В этом случае регулируемая величина в функции задающего воздействия будет определяться выражением
 (9.54)
(9.54)
Для получения полной инвариантности необходимо выполнить условие  . Отсюда можно найти требуемую передаточную функцию главной обратной связи:
. Отсюда можно найти требуемую передаточную функцию главной обратной связи:
 (9.55)
(9.55)
При разложении этого выражения в степенной ряд получаем
 (9.56)
(9.56)
Отсюда видно, что для получения полной инвариантности необходимо использовать главную обратную связь с коэффициентом передачи, в общем случае отличным от единицы:  (в астатических системах а0 = 1), и дополнительно ввести положительные обратные связи по производным от регулируемой величины.
(в астатических системах а0 = 1), и дополнительно ввести положительные обратные связи по производным от регулируемой величины.
Реализация полной инвариантности, т. е. реализация условия (9.55), практически невозможна. Это определяется, во-первых, невозможностью точного введения высших производных (9.56), а во-вторых, тем, что при выполнении условия (9.55) система будет находиться на границе устойчивости. Поэтому неединичные обратные связи используются лишь как средство повышения точности замкнутой системы регулирования.
Аналогично тому, как это делалось для систем комбинированного управления, структурную схему с неединичной обратной связью (рис. 9.15, а) можно заменить эквивалентной схемой с единичной главной обратной связью, но с некоторой эквивалентной передаточной функцией разомкнутой системы Wэ (р)- Последняя может быть определена из равенства передаточных функций замкнутой системы двух схем (рис. 9.15, а и 9.15, б);
 (9.57)
(9.57)
Отсюда находим
 (9.58)
(9.58)
Наиболее эффективным действие неединичной обратной связи оказывается в статической системе. Здесь простым изменением коэффициента передачи жесткой главной обратной связи можно получить астатизм относительно управляющего воздействия.
Для того чтобы показать это, рассмотрим передаточную функцию разомкнутой статической системы (5.36):
Будем считать, что главная обратная связь жесткая, т. е.  . Тогда эквивалентная передаточная функция разомкнутой системы (9.58) будет
. Тогда эквивалентная передаточная функция разомкнутой системы (9.58) будет
 (9.59)
(9.59)
Нетрудно видеть, что при выполнении условия
 (9.60)
(9.60)
или
 (9.61)
(9.61)
в знаменателе (9.59) пропадает член с оператором в нулевой степени. В этом случае эквивалентная передаточная функция разомкнутой системы будет соответствовать астатизму первого порядка:
 (9.62)
(9.62)
Эта система будет обладать добротностью по скорости
 (9.63)
(9.63)
Таким образом, при помощи совершенно элементарного приема — уменьшения коэффициента передачи главной обратной связи на незначительную
величину по сравнению с единицей — можно получить в системе астатизм первого порядка относительно задающего воздействия, что будет означать отсутствие статической ошибки и равенство нулю первого коэффициента ошибки: с0 = 0. Следует заметить, что аналогичные результаты, т. е. уничтожение
статической ошибки от задающего воздействия в статической системе, можно получить не менее простым способом масштабирования входной или выходной величины системы регулирования (рис. 9.16).
Если на входе или выходе системы включить масштабирующее устройство с
коэффициентом передачи |
, то регулируемая величина y(t) будет связана с задающим |
воздействием g(t) соотношением |
|
 (9.64)
(9.64)
В установившемся режиме при статическом регулировании W(0) = К. Поэтому для установившегося режима при g (t) = g0 = const
 (9.65)
(9.65)
что соответствует отсутствию статической ошибки. Такое масштабирование делается практически во всех статических системах регулирования, что позволяет рассматривать их по отношению к задающему воздействию как астатические и считать для них коэффициент ошибки
с0 = 0.
Однако равенство нулю первого коэффициента ошибки в статических системах может быть достигнуто при выполнении условия К = const, что следует из приведенных выше формул. Если общий коэффициент усиления нестабилен, то нетрудно показать, что в системе появится статическая ошибка
 (9.66)
(9.66)
где  - относительное изменение коэффициента усиления по сравнению с расчетным значением. Следовательно, первый коэффициент ошибки в этом случае будет равен
- относительное изменение коэффициента усиления по сравнению с расчетным значением. Следовательно, первый коэффициент ошибки в этом случае будет равен  .
.
Г Л А В А 10 УЛУЧШЕНИЕ КАЧЕСТВА ПРОЦЕССА РЕГУЛИРОВАНИЯ
§ 10.1. О корректирующих средствах
Под улучшением качества процесса регулирования, помимо повышения точности в типовых режимах, понимается изменение динамических свойств системы регулирования с целью получения необходимого запаса устойчивости и быстродействия. В этой проблеме основное значение имеет обеспечение запаса устойчивости. Это объясняется тем, что стремление снизить ошибки системы регулирования приводит, как правило, к необходимости использовать такие значения общего коэффициента усиления, при которых без принятия специальных мер система вообще оказывается неустойчивой.
При решении задачи , повышения запаса устойчивости проектируемой системы регулирования прежде всего необходимо попытаться рациональным образом изменить ее параметры (коэффициенты передачи отдельных звеньев? постоянные времени и т. п.) так, чтобы удовлетворить требованиям качества регулирования, которые определяются критериями качества. При невозможности решить эту задачу в рамках имеющейся системы приходится идти на изменение ее структуры. Для этой цели обычно используется введение в систему регулирования так называемых корректирующих средств, которые должны изменить динамику всей системы в нужном направлении. К корректирующим средствам относятся, в частности, корректирующие звенья, представляющие собой динамические звенья с определенными передаточными функциями.
В тех случаях, когда корректирующие звенья используются именно для получения устойчивости системы регулирования или для повышения ее запаса устойчивости, они называются иногда демпфирующими или стабилизирующими звеньями. При этом имеется в виду, что звенья демпфируют колебания, которые возникают в системе регулирования. Термин «корректирующие звенья» является более широким и используется для звеньев, которые вводятся в систему для изменения статических и динамических свойств с различными целями.
Получение требуемого быстродействия обычно обеспечивается при проектировании системы регулирования посредством выбора соответствующих элементов цепи регулирования (исполнительных органов, усилителей, серводвигателей и т. п.). Однако возможно улучшение быстродействия системы посредством использования корректирующих средств.
Заметим также, что проблема получения в системе регулирования требуемых качественных показателей — точности в типовых режимах, запаса устойчивости и быстродействия — является единой и ни один из входящих в нее вопросов не может решаться в отрыве от других. Это делает всю проблему весьма сложной, что заставляет в некоторых случаях получать требуемое решение посредством последовательного приближения и рассмотрения многих вариантов.
Корректирующие звенья могут вводиться в систему регулирования различными способами.
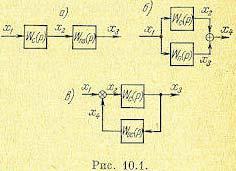
На рис. 10.1, а представлена схема введения в цепь регулирования корректирующего устройства последовательного типа. Здесь Wc (р) представляет собой передаточную функцию части цепи регулирования, Wпз (р) —передаточную функцию последовательного корректирующего звена.
Результирующая передаточная функция может быть найдена из выражения
 (10.1)
(10.1)
На рис. |
10.1, б представлена схема введения в цепь регулирования корректирующего |
устройства |
параллельного типа, имеющего передаточную функцию Wп (p). Результирующая |
передаточная функция: |
|
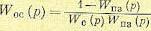
На рис. 10.1, в изображено корректирующее устройство, выполненное в виде местной обратной связи. Результирующая передаточная функция находится следующим образом.
На вход звена с передаточной функцией Wc (р) поступает сигнал х2, равный сумме или разности входного сигнала x1 и сигнала x4, поступающего-по цепи обратной связи:
Знак плюс соответствует положительной обратной связи, а знак минус — отрицательной
обратной связи. |
|
Сигнал обратной связи |
. |
В результате получим |
|
или
 .
.
Отсюда можно найти результирующую передаточную функцию:  (10.3)
(10.3)
Вэтом выражении знак минус соответствует положительной обратной связи, а знак плюс — отрицательной.
Вкачестве корректирующих устройств обычно применяют отрицательные обратные связи, хотя не исключена возможность использования и положительных обратных связей. Поэтому в дальнейшем будем использовать формулу (10.3) со знаком плюс, считая, что она записана для отрицательной обратной связи:
 (10.3’)
(10.3’)
Использование того или иного типа корректирующих устройств, т. е. последовательных звеньев, параллельных звеньев или обратных связей,. определяется удобством технического осуществления.
В линейных системах динамические свойства их при введении корректирующих устройств различного типа могут быть сделаны одинаковыми, и для корректирующего устройства одного типа можно подобрать эквивалентное корректирующее устройство другого типа.
Эквивалентность означает, что присоединение к системе регулирования одного или другого корректирующего устройства образует полностью подобные в динамическом отношении системы.
Для получения формул перехода от корректирующего устройства одного типа к корректирующему устройству другого типа необходимо приравнять результирующие передаточные функции (10.1) — (10.3). В результате имеем
 (10.4)
(10.4)
Отсюда можно получить шесть формул перехода от передаточной функции звена одного типа к передаточной функции звена другого типа:
 (10.5)
(10.5)
 (10.6)
(10.6)
 (10.7)
(10.7)
 (10.8)
(10.8)
 (10.9)
(10.9)  (10.10).
(10.10).
Звенья последовательного типа особенно удобно применять в тех случаях, когда в системе регулирования используется электрический сигнал в виде напряжения постоянного тока, величина которого функционально связана с сигналом ошибки u = f (х), например, линейной зависимостью u = kх. Тогда корректирующее звено может быть осуществлено при помощи R-, С- и L-элементов.
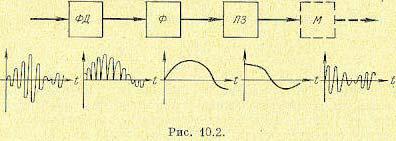
Эти звенья оказываются значительно менее удобными, если сигнал представляет собой модулированное напряжение переменного тока. В этом случае имеется принципиальная возможность построения звеньев на тех же R-, С-и L-элементах, воздействующих на огибающую модулированного сигнала, но ввиду их сложности и недостатков они пока почти не находят применения. При наличии модулированного сигнала и при необходимости использования звеньев последовательного типа приходится устанавливать в канале переменного тока фазочувствителъный демодулятор. После выпрямления и фильтрации сигнала от высших гармоник в этом случае появляется возможность ввести звено последовательного типа. Схема введения звена последовательного типа изображена для этого случая на рис. 10.2. Модулированный сигнал переменного тока поступает на фазочувствителъный демодулятор ФД, затем после выпрямления на фильтр Ф и далее на последовательное корректирующее звено ПЗ. В случае необходимости вести дальнейшее усиление на переменном токе после последовательного звена устанавливается модулятор М. Однако такой путь часто связан с серьезным ухудшением динамических свойств системы вследствие влияния дополнительных постоянных времени фильтра, устанавливаемого на выходе демодулятора.
Звенья параллельного типа удобно применять в тех случаях, когда необходимо осуществить сложный закон регулирования с введением интегралов и производных от сигнала ошибки. Примером этому может служить рассмотренный в предыдущей главе случай использования изодромных устройств.
Обратные связи находят наиболее широкое применение вследствие простоты технической реализации. Это объясняется тем обстоятельством, что на вход обратной связи поступает сигнал сравнительно высокого уровня, часто даже непосредственно с выхода системы регулирования, промежуточного серводвигателя или выходного каскада усилителя. Другое не менее важное обстоятельство заключается в том, что корректирующие устройства
различного типа оказывают различное влияние на содержащиеся в системе нелинейности. Если обратная связь охватывает участок канала регулирования, содержащий какую-либо нелинейность, например силы трения, люфт, зону нечувствительности и т. п., то влияние этой нелинейности на протекание процессов в системе регулирования меняется существенным образом. Отрицательные обратные связи имеют свойство уменьшать влияние нелинейностей тех участков цепи регулирования, которые ими охватываются. Так как практически все системы регулирования содержат те или иные нелинейности, ухудшающие качество регулирования, то использование корректирующих устройств в виде отрицательных обратных связей, как правило, дает возможность добиться лучших результатов по сравнению с другими типами корректирующих устройств.
Аналогичным образом отрицательные обратные связи дают значительно лучший эффект в тех случаях, когда вследствие воздействия внешних факторов (время, температура и т. п.) меняется коэффициент усиления какой-либо части цепи регулирования, охватываемой отрицательной обратной связью.
§ 10.2. Последовательные корректирующие звенья
Корректирующие звенья последовательного типа могут составляться из различных по своей физической природе элементов — электрических, механических, гидравлических и т. д. Наиболее просто такие звенья могут быть составлены из электрических R-, С- и L-элементов. Электрические последовательные звенья имеют самое широкое распространение в системах автоматического регулирования, поэтому в дальнейшем они будут рассмотрены в первую очередь.
Последовательные звенья из R-, С- и L -элементов часто называют пассивными последовательными корректирующими устройствами, так как они не содержат источников электродвижущих сил.
Существует весьма большое количество пассивных последовательных звеньев. В некоторых книгах и справочниках приводятся таблицы, содержащие схемы десятков и даже сотен звеньев различного вида.
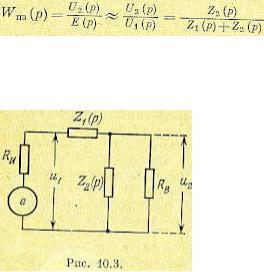
Обычно пассивные последовательные звенья могут быть представлены в виде обобщенной схемы, изображенной на рис. 10.3.
Функции Z1 (р) и, Z2 (р) представляют собой сопротивления участков цепи, записанные в операторной форме. Влияние предыдущего и последующего звеньев на работу последовательного корректирующего звена может быть учтено введением сопротивления выхода источника сигнала Rи и сопротивления входа Rв.
С учетом введенных сопротивлений передаточная функция, последовательного звена будет
 (10.12)
(10.12)
В идеализированном случае, когда  приобретает вид
приобретает вид
Передаточная функция (10.11), как правило, соответствует звеньям с более плохими корректирующими свойствами по сравнению с (10.12). В табл. 10.1
приведены основные типы последовательных пассивных электрических корректирующих звеньев в соответствии с формулами (10.11) и (10.12).
Пассивные дифференцирующие звенья подавляют низкие частоты и вносят положительный фазовый сдвиг. Подавление низких частот обычно недопустимо, так как
снижает результирующий общий коэффициент усиления и увеличивает ошибки системы регулирования. Если восстановить на низких частотах прежний коэффициент усиления
введением дополнительного усиления  , то передаточная функция звена совместно с дополнительным усилителем будет
, то передаточная функция звена совместно с дополнительным усилителем будет
 (10.13)
(10.13)
Такое звено обладает свойством усиливать высокие частоты в Т1/Т2, раз. Асимптотическая л.а.х. этого звена может быть получена из л.а.х., изображенной в табл. 10.1, поднятием ее параллельно самой себе до совпадения левой горизонтальной асимптоты с осью абсцисс. Л.ф.х. остается без изменений.