

Теория систем автоматического управления. В.А. Бесекерский, Е.П. Попов, 1975
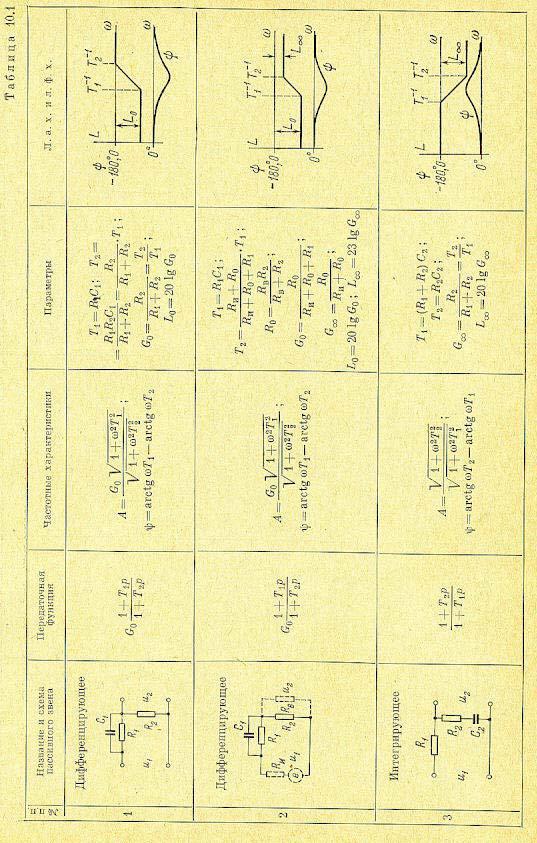
.pdfПассивные интегрирующие звенья подавляют усиление на высоких частотах и вносят в некотором интервале частот отрицательный фазовый сдвиг.
Интегро-дифференцирующие звенья подавляют усиление в некотором интервале «средних» частот, а вносимый фазовый сдвиг вначале отрицателен, затем с ростом частоты становится
нулевым на частоте  . При дальнейшем росте частоты фазовый сдвиг становится положительным. Подавление усиления в области средних частот происходит в соответствии с относительным значением модуля }Wпз (jω) на «средней» частоте:
. При дальнейшем росте частоты фазовый сдвиг становится положительным. Подавление усиления в области средних частот происходит в соответствии с относительным значением модуля }Wпз (jω) на «средней» частоте:
Фазосдвигающие звенья вносят отрицательный фазовый сдвиг при равенстве единице модуля частотной передаточной функции, | Wпз (jω) | = 1, что соответствует прохождению гармонического сигнала любой частоты без изменения его амплитуды.
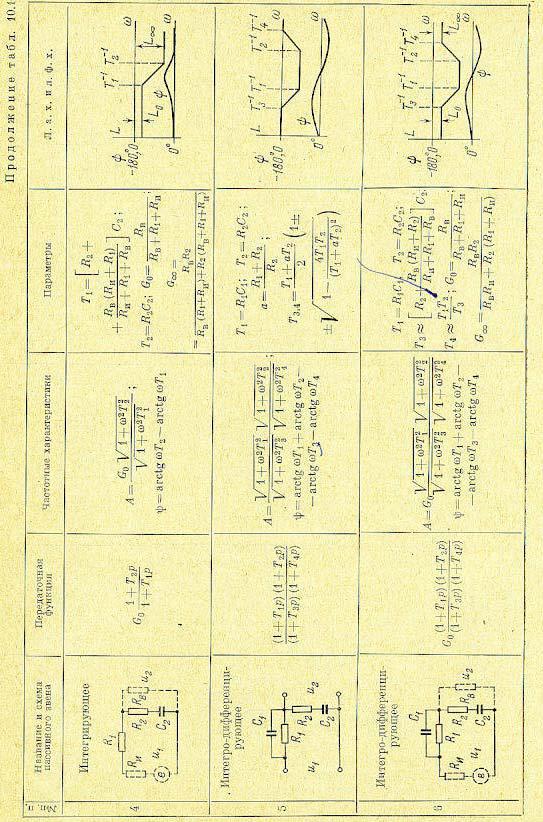
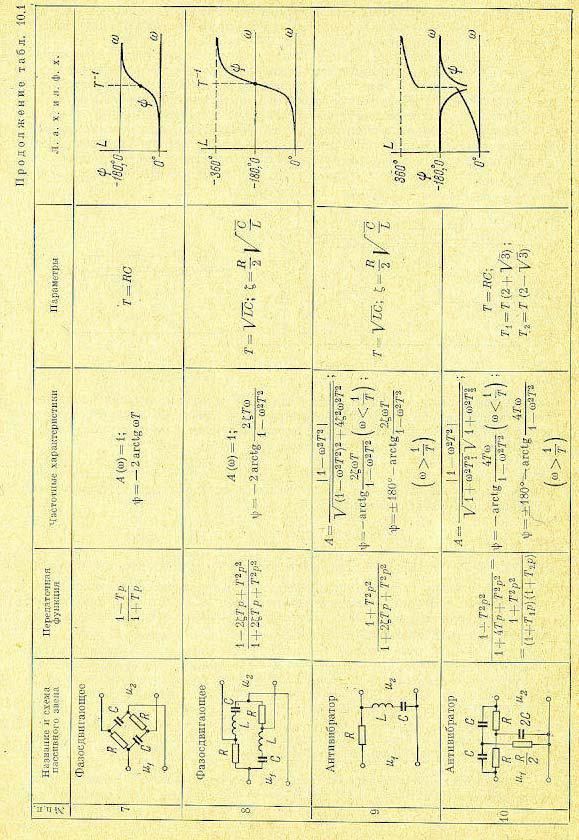
Антивибраторы по своим свойствам противоположны консервативному звену и на некоторой частоте (частоте настройки) имеют модуль коэффициента передачи, равный нулю.
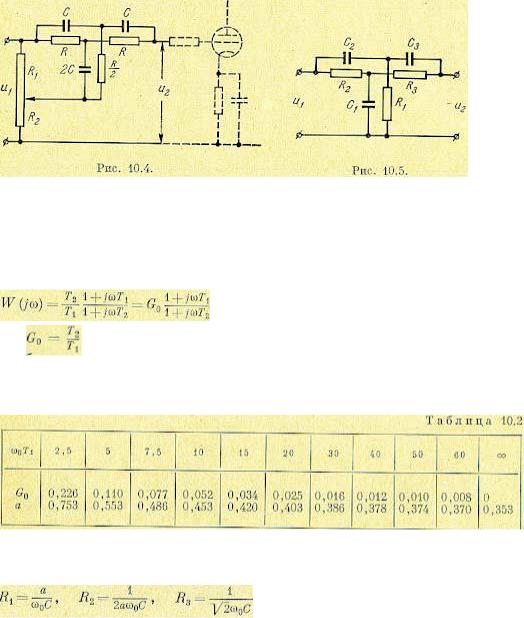
Для модулированного сигнала в настоящее время находят некоторое применение только пассивные последовательные дифференцирующие звенья. Как следует из § 4.9, такие звенья должны иметь амплитудную частотную характеристику, симметричную относительно несущей частоты. При этом звено должно подавлять несущую частоту (см. рис. 4.30).
Отличие пассивного последовательного дифференцирующего звена заключается в том, что на несущей частоте коэффициент передачи должен быть отличным от нуля подобно тому, как для частотной характеристики аналогичного звена постоянного тока отличен от нуля коэффициент передачи
на нулевой частоте (см. табл. 10.1). Для этой цели амплитудная частотная характеристика обычного дифференцирующего звена на несущей частоте (см. рис. 4.30) должна быть смещена параллельно самой себе вверх. В этом случае для модулированного сигнала
 (10.15)
(10.15)
где ω — несущая частота, ω0 — частота огибающей; частотная передаточная функция для огибающей имеет вид
|
(10.16) |
где |
— коэффициент передачи звена на несущей частоте (со = 0). |
Подобное смещение амплитудной частотной характеристики может быть получено при помощи схемы суммирования (рис. 10.4). Для этой цели может применяться также расстройка в двойном Т-образном контуре. Схема контура для этого случая изображена на рис. 10.5.
Параметры Т-образного контура для случая равенства емкостей всех конденсаторов (С1 = С2 = С3 = С) могут подбираться в соответствии с табл. 10.2.
Сопротивления, входящие в двойной Т-образный контур, вычисляются по формулам
Подробнее расчет пассивных дифференцирующих звеньев на несущей частоте приведен в
[27, 38].
Последовательные корректирующие звенья могут быть также построены на механических элементах. В табл. 10.3 изображены три основных пассивных звена: дифференцирующее, интегрирующее и интегро-дифференцирующее. Эти звенья построены на пружинах и демпферах. В качестве входной величины используется перемещение х1 и выходной — перемещение х2.
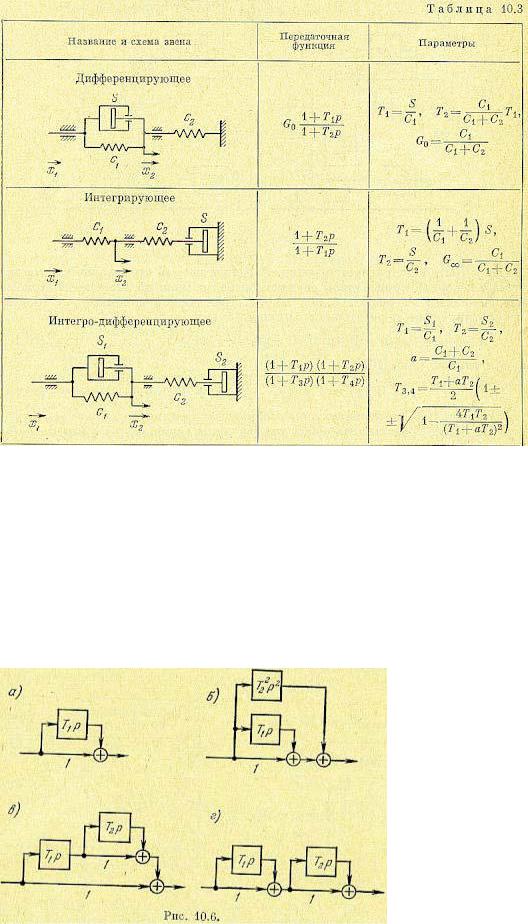
Передаточные функции этих звеньев полностью совпадают с передаточными функциями соответствующих звеньев, приведенных в табл. 10.1, для идеализированного случая  . Параметры элементов можно получить из приведенных в табл. 10.1 формул для электрических звеньев заменой емкостей конденсаторов (С) на коэффициенты сопротивления демпфе-ров (S) и электрического сопротивления (R) на величину, обратную жесткости пружины (с).
. Параметры элементов можно получить из приведенных в табл. 10.1 формул для электрических звеньев заменой емкостей конденсаторов (С) на коэффициенты сопротивления демпфе-ров (S) и электрического сопротивления (R) на величину, обратную жесткости пружины (с).
§ 10.3. Параллельные корректирующие звенья
Как уже отмечалось, параллельные корректирующие звенья удобно применять при использовании сложных законов управления, когда наряду с основным сигналом вводятся его производные или интегралы.
Введение интегралов преследует цель снижения установившейся ошибки. Этот вопрос был рассмотрен в главе 9 в связи с повышением точности систем автоматического регулирования посредством использования изодромных устройств.
Введение производных преследует обычно цель обеспечения устойчивости. В этом случае используются звенья дифференцирующего типа, включаемые параллельно основной цепи.
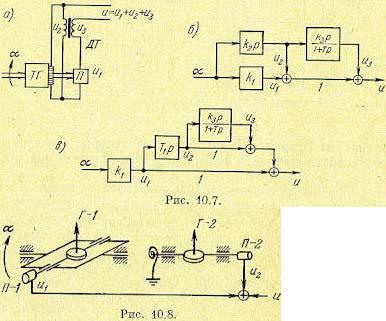
Варианты параллельного включения дифференцирующих звеньев показаны на рис. 10.6. Получение производной второго порядка при помощи одного звена является затруднительным. Поэтому схема, изображенная на рис. 10.6, б используется редко. Введение второй производной дополнительно к первой производной осуществляется обычно по каскадным схемам, изображенным на рис. 10.6, в и 10.6, г. Для первой из них (рис. 10.6, в) результирующая передаточная функция будет
 (10.18),
(10.18),
а для второй (рис. 10.6, г)
 (10.19)
(10.19)
На рис. 10.6 дифференциаторы изображены идеальными. Более вероятно, что они будут представлять собой дифференцирующие звенья с замедлением (рис. 4.24).
Заметим, что введение параллельных корректирующих звеньев, представляющих собой интеграторы, соответствует поднятию нижних частот. Это хорошо видно на рис. 9.6. Введение параллельных корректирующих звеньев, представляющих собой дифференциаторы, соответствует поднятию верхних частот. Это можно видеть из формул (10.18) и (10.19).
В качестве примера на рис. 10.7, а изображен случай введения дополнительно к основному сигналу, пропорциональному углу поворота вала, сигналов, пропорциональных первой и второй производным угла поворота. Первый сигнал вырабатывается датчиком угла — потенциометром, второй — тахо-генератором и третий — дифференцирующим трансформатором, на вход которого поступает напряжение тахогенератора.
На рис. 10.7, б приведена структурная схема рассматриваемого устройства. На ней обозначено: k1 — коэффициент передачи потенциометра, k2 — коэффициент передачи тахогенератора, k3 и Т — коэффициент передача и постоянная времени дифференцирующего трансформатора. Результирующая передаточная функция
 (10.20)
(10.20)
Структурная схема может быть приведена к виду, изображенному на рис. 10.7, в, если в выражении (10.20) вынести за скобки множитель k1:
 (10.21)
(10.21)
где  .
.
Структурная схема для этого случая приведена на рис. 10.7, в
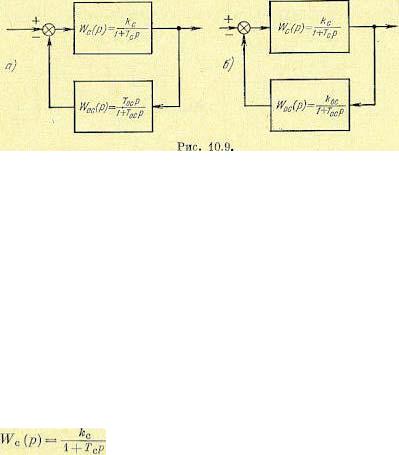
На рис. 10.8 приведен пример параллельного соединения гироскопических чувствительных элементов. Трехстепенный гироскоп Г-1 сохраняет заданное положение в пространстве. Поэтому при наклоне Г-1 , основания на выходе потенциометра П-1 будет возникать напряжение, пропорциональное этому углу наклона: u1=k1а. Двухстепенный гироскоп Г-2 работает в режиме гиротахометра. При наклонах основания угол прецессии его можно приближенно считать пропорциональным скорости наклона. На выходе потенциометра П-2 будет поэтому напряжение u2=k2pа. Сумма напряжений u = u1 + u2 определит результирующую передаточную функцию
 (10.22)
(10.22)
где  .
.
Этой передаточной функции соответствует структурная схема 10.6, а.
§ 10.4. Обратные связи
Как уже отмечалось выше, обратные связи (см. рис. 10.1, в) могут быть положительными и отрицательными. Кроме того, обратные связи могут быть жесткими и гибкими. Для уяснения последнего рассмотрим передаточную функцию (10.3), записанную для случая отрицательной обратной связи.
Из этого выражения найдем передаточную функцию для установившегося режима, для чего в (10.3) необходимо положить р = 0:
 (10.23)
(10.23)
Здесь может быть два случая. Если выполняется условие Woc(0) = 0, что будет при использовании в цепи обратной связи дифференцирующих элементов, то в установившемся режиме Wск(0) = Wc(0). Это означает, что в этом режиме передаточная функция цепи, охваченной обратной связью, будет равна передаточной функции исходной цепи. Такая обратная связь
называется гибкой. Нетрудно видеть, что гибкая обратная связь действует только в переходных режимах, а в установившемся режиме она как бы отключается.
Если  , то обратная связь действует не только в переходном, но и в установившемся режиме. В этом случае обратная связь называется жесткой.
, то обратная связь действует не только в переходном, но и в установившемся режиме. В этом случае обратная связь называется жесткой.
Заметим, что случай, когда звено, охватываемое обратной связью, относится к числу интегрирующих звеньев и  не вносит особенностей. Здесь по-прежнему условие Woc(0) = 0 будет соответствовать случаю гибкой обратной связи, так как числитель (10.23) будет стремиться к бесконечности быстрее, чем знаменатель, и результирующая передаточная функция
не вносит особенностей. Здесь по-прежнему условие Woc(0) = 0 будет соответствовать случаю гибкой обратной связи, так как числитель (10.23) будет стремиться к бесконечности быстрее, чем знаменатель, и результирующая передаточная функция  так же, как и передаточная функция исходной цепи. Заметим также, что понятие гибкой или жесткой обратной связи связано с той величиной, которая принимается в качестве выходной в исходном звене. Так, например, обратная связь может быть гибкой по отношению к углу поворота вала двигателя и жесткой по отношению к скорости его вращения, которая является первой производной от угла поворота.
так же, как и передаточная функция исходной цепи. Заметим также, что понятие гибкой или жесткой обратной связи связано с той величиной, которая принимается в качестве выходной в исходном звене. Так, например, обратная связь может быть гибкой по отношению к углу поворота вала двигателя и жесткой по отношению к скорости его вращения, которая является первой производной от угла поворота.
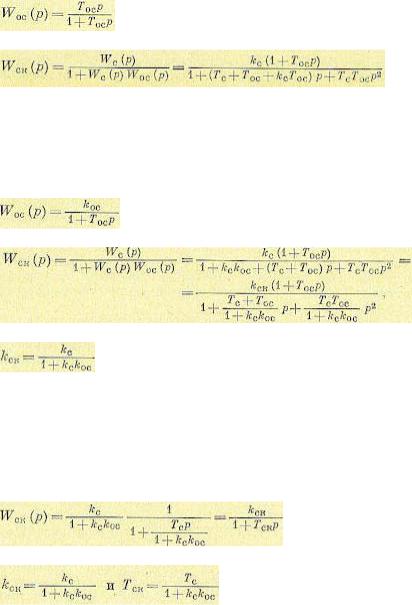
На рис. 10.9, а и 10.9, б изображены примеры гибкой и жесткой отрицательных обратных связей. Обратной связью замыкается апериодическое звено с передаточной функцией
Впервом случае (рис. 10.9, а) обратная связь представляет собой дифференцирующее звено
сзамедлением (например, дифференцирующий конденсатор) с передаточной функцией
Результирующая передаточная функция
Результирующий коэффициент передачи в уетановившемся состоянии равен &с, так же как и в исходном апериодическом звене. Таким образом, эта обратная связь является гибкой. Наличие дифференцирующего элемента в цепи обратной связи и привело к получению гибкой обратной связи.
Во втором случае (рис. 10.9, б) обратная связь представляет собой апериодическое звено с передаточной функцией
Результирующая передаточная функция
где
представляет собой новое значение коэффициента передачи звена, замкнутого обратной связью. В рассмотренном случае обратная связь является жесткой, так как она изменяет коэффициент передачи звена в установившемся состоянии.
Весьма важным является случай, когда цепь обратной связи представляет собой идеальное безынерционное звено с передаточной функцией Wос(р) = = kос. Этот случай легко получить из последних равенств, положив в них Тос = 0. В результате для апериодического звена, замкнутого такой отрицательной обратной связью, получим
где
Из этих выражений видно, что подобная отрицательная обратная связь уменьшает коэффициент передачи и постоянную времени апериодического звена в  раз, где
раз, где  представляет собой коэффициент передачи по петле обратной связи.
представляет собой коэффициент передачи по петле обратной связи.
На первый взгляд здесь имеет место полная аналогия со случаем уменьшения постоянной времени и коэффициента передачи звена в одинаковое число раз при помощи пассивного дифференцирующего звена (см. § 10.2). Однако это не так. Если рассмотреть случай двух апериодических звеньев первого порядка с одинаковыми постоянными времени  , включенных последовательно, то, как нетрудно показать, для уменьшения суммы постоянных
, включенных последовательно, то, как нетрудно показать, для уменьшения суммы постоянных
времени  в n раз при помощи пассивных дифференцирующих звеньев необходимо подавить результирующий коэффициент передачи в n2 раз. При решении этой же задачи посредством использования жесткой обратной связи, охватывающей сразу оба звена, получится снижение результирующего коэффициента передачи только в n раз. Задача снижения суммы постоянных времени звеньев, входящих в систему регулирования, встречается в практике довольно часто. Это делает применение обратных связей обычно более предпочтительным.
в n раз при помощи пассивных дифференцирующих звеньев необходимо подавить результирующий коэффициент передачи в n2 раз. При решении этой же задачи посредством использования жесткой обратной связи, охватывающей сразу оба звена, получится снижение результирующего коэффициента передачи только в n раз. Задача снижения суммы постоянных времени звеньев, входящих в систему регулирования, встречается в практике довольно часто. Это делает применение обратных связей обычно более предпочтительным.
В динамическом отношении отрицательные обратные связи могут оказывать самое различное действие. Однако, подобно тому как это было сделано для последовательных корректирующих устройств, можно наметить три основных вида отрицательных обратных связей:
1) обратные связи, подавляющие высокие частоты (аналоги пассивного последовательного интегрирующего звена);
 ,
, равна коэффициенту передачи потенциометра. Результирующая передаточная функция в соответствии с формулой (10.3) будет
равна коэффициенту передачи потенциометра. Результирующая передаточная функция в соответствии с формулой (10.3) будет (10.25)
(10.25)