

Теория систем автоматического управления. В.А. Бесекерский, Е.П. Попов, 1975
.pdfГ ЛАВ А 7 ПОСТРОЕНИЕ КРИВОЙ ПЕРЕХОДНОГО ПРОЦЕССА В СИСТЕМАХ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
§ 7.1. Общие соображения
Дифференциальное уравнение обыкновенной линейной системы автоматического регулирования, записанное для ошибки регулирования, согласно (5.2) имеет вид
 (7.1)
(7.1)
где  — алгебраизированный оператор дифференцирования, g(t) — задающее воздействие и f(t) — возмущающее воздействие.
— алгебраизированный оператор дифференцирования, g(t) — задающее воздействие и f(t) — возмущающее воздействие.
Решение линейного дифференциального уравнения с постоянными коэффициентами
(7.1) будет
 (7.2)
(7.2)
где хп (t) — общее решение однородного уравнения  , имеющее вид
, имеющее вид
 (7.3)
(7.3)
причем С1, . . ., Сn — произвольные постоянные, определяемые из начальных условий процесса, а р1,..., рn — корни характеристического уравнения D(р) = 0. Выражение (7.3) записано для случая отсутствия нулевых и кратных корней.
Частное, или вынужденное решение xв (t) определяется правой частью уравнения (7.1), и оно соответствует некоторому установившемуся режиму в системе, который будет существовать после затухания хп (t).
Полным решением (7.2) описывается процесс регулирования в линейной системе (общий случай возмущенного движения системы). Первая часть этого решения хп (?) в виде (7.3) представляет собой собственное движение системы, наложенное на частное решение хй (?).
Исходное дифференциальное уравнение системы может быть записано также для
регулируемой величины  . В системах стабилизации g(t) = 0 и поэтому y(t) = — х (t).
. В системах стабилизации g(t) = 0 и поэтому y(t) = — х (t).
Необходимо обратить внимание на следующее важное обстоятельство. Частное решение хв (t) складывается из отдельных слагаемых, отвечающих отдельным членам правой части дифференциального уравнения (7.1). Если действует несколько возмущающих воздействий, то в решении будет соответственно и несколько слагаемых. При этом каждое слагаемое частного решения хв (t) может определяться по отдельности для каждого возмущающего или задающего воздействия независимо от других, а затем их можно складывать. В этом состоит так называемый принцип суперпозиции.
Следовательно, если имеется дифференциальное уравнение
 ,
,
то частное решение, определяющее установившийся процесс в системе, будет иметь три слагаемых, каждое из которых определяется частным решением одного из уравнений:
Несколько иначе обстоит дело с определением переходной составляющей. В решении для переходной составляющей (7.3) произвольные постоянные С1,..., Сn должны вычисляться по начальным условиям обязательно с использованием полного выражения решения (7.2), т. е. при исследовании переходных процессов в системах автоматического регулирования всегда надо оговаривать соответствующие внешние условия — задавать g(t) и f(t).
Если переходный процесс ищется как решение однородного уравнения  при заданных начальных условиях системы, то результат такого решения отвечает случаю отсутствия задающих и возмущающих воздействий, причем система совершает свободное движение с какого-то смещенного начального положения. Если же переходный процесс происходит в результате изменения внешних условий (возмущающих сил, изменения нагрузки, перенастройки, изменения режима слежения и т. п.), то этот переходный процесс надо исследовать иначе, с определением произвольных постоянных из полного решения, включающего в себя установившуюся составляющую. Вид воздействия
при заданных начальных условиях системы, то результат такого решения отвечает случаю отсутствия задающих и возмущающих воздействий, причем система совершает свободное движение с какого-то смещенного начального положения. Если же переходный процесс происходит в результате изменения внешних условий (возмущающих сил, изменения нагрузки, перенастройки, изменения режима слежения и т. п.), то этот переходный процесс надо исследовать иначе, с определением произвольных постоянных из полного решения, включающего в себя установившуюся составляющую. Вид воздействия  и стоящих перед ними операторных многочленов оказывает существенное влияние на вид переходного процесса.
и стоящих перед ними операторных многочленов оказывает существенное влияние на вид переходного процесса.
При нахождении кривой переходного процесса в системе автоматического регулирования возникают две трудности. Первая трудность — принципиального характера — заключается в том, что в реальных системах регулирования управляющие и возмущающие воздействия не являются известными функциями времени, а носят случайный характер. В связи с этим приходится рассматривать некоторые типовые входные воздействия. Типовые входные воздействия стремятся выбирать так, чтобы они были по возможности близкими к реальным воздействиям в системе автоматического регулирования.
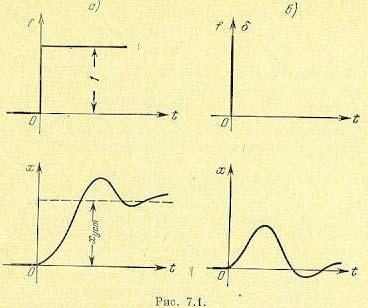
Для следящих систем при g (t) = 0 и систем стабилизации переходный процесс может строиться для случая приложения возмущающего воздействия. В качестве типовых используются возмущающие воздействия в виде единичной ступенчатой функции f(t) = 1(t) и в виде единичной импульсной функции  . Эти типовые возмущения изображены на рис. 7.1.
. Эти типовые возмущения изображены на рис. 7.1.
Входная функция первого типа часто встречается в системах автоматического регулирования и представляет собой внезапный скачок возмущающего воздействия на некоторую постоянную величину, например увеличение тока нагрузки генератора, увеличение момента нагрузки двигателя и т. п. Реакция системы на такое воздействие, построенная для регулируемой величины или для ошибки, отличающихся только знаками  , представляет собой переходную функцию системы для данного возмущения.
, представляет собой переходную функцию системы для данного возмущения.
Входная функция второго типа также встречается в системах автоматического регулирования в виде кратковременного удара нагрузки, например при коротком замыкании электрического генератора, которое прекращается через небольшой промежуток времени системой защиты (плавкие предохранители, максимальные автоматы
и т. п.), при кратковременном возрастании момента нагрузки двигателя и т. д. Реакция системы на воздействие этого типа представляет ее функцию веса.
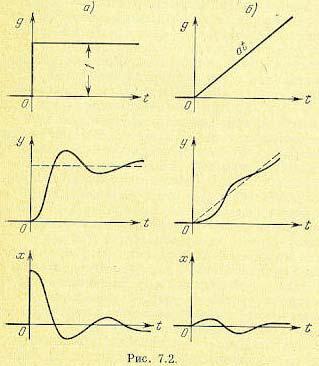
В следящих системах для построения переходного процесса могут приниматься типовые задающие воздействия (рис. 7.2) в виде единичной ступенчатой функции g(t) = 1(t) или в виде воздействия, изменяющегося по линейному закону g(t) = a·1(t).
Воздействие первого типа соответствует, например, в следящих системах воспроизведения угла быстрому повороту командной оси на некоторый угол. Реакция системы у (t) на такое управляющее воздействие представляет собой ее переходную функцию для задающего воздействия. Воздействие второго типа является характерным для следящих систем воспроизведения угла, когда командная ось внезапно начинает двигаться с постоянной скоростью.
Возможно изучение поведения системы регулирования и в том случае, когда входное воздействие представляет собой не детерминированную (определенную), а случайную функцию времени. Этот вопрос будет рассмотрен в главе 11.
Вторая трудность — непринципиального характера — заключается в том, что обычно системы регулирования описываются дифференциальными уравнениями сравнительно высокого порядка. Это усложняет практические расчеты; поэтому для облегчения задачи построения кривой переходного процесса во многих случаях приходится пользоваться приближенными методами, а также применять вычислительные устройства непрерывного и дискретного действия.
Для построения кривой переходного процесса часто используют численные и графические методы решения дифференциальных уравнений. Таких методов существует много. Применительно к задачам теории автоматического регулирования наиболее удобным оказывается Численно-графический метод, разработанный Д. А. Башкировым [98, 121]. Важным достоинством этого метода является то, что он без заметных усложнений может применяться к уравнениям с переменными во времени параметрами и к нелинейным уравнениям. Кроме того, метод Башкирова позволяет с одинаковой простотой строить процессы регулирования при любых заданных внешних воздействиях, в том числе и заданных графически или в виде таблиц.
Для получения переходных процессов с большим успехом и весьма широко применяются также вычислительные машины. Различаются вычислительные машины

непрерывного и дискретного (цифровые) действия. Они строятся на электронных, полупроводниковых и электромеханических элементах.
Для сложных автоматических систем в настоящее время этому методу отдается предпочтение. Важно отметить, что при использовании вычислительных машин часто можно обходиться без составления дифференциальных уравнений тех звеньев автоматической системы, для которых имеются действующие макеты. Тогда для остальной части звеньев набираются их дифференциальные уравнения на вычислительной машине, к которой подключаются имеющиеся действующие макеты. Это свойство можно использовать для испытания и настройки регуляторов в лабораторных условиях.
Ниже будет рассмотрена часть наиболее распространенных методов построения кривой переходного процесса. К ним относятся метод непосредственного решения линейных дифференциальных уравнений или так называемый классический метод, использование преобразований Фурье, Лапласа и Карсона — Хевисайда, метод трапецеидальных вещественных частотных характеристик и использование вычислительных машин.
В дальнейшем изложении будем рассматривать построение переходного процесса для ошибки х (t). Однако методика остается единой и для других случаев построения переходного процесса, например для отыскания у (t) при  .
.
§ 7.2. Непосредственное решение исходного дифференциального уравнения
Пусть система автоматического регулирования описывается линейным дифференциальным уравнением с правой частью
 (7.4)
(7.4)
Для отыскания полного решения этого дифференциального уравнения необходимо найти частное или вынужденное решение уравнения с правой частью хв (t) и определить корни характеристического уравнения
Как указывалось выше, полное решение будет иметь вид
 (7.5)
(7.5)
Дальнейшим шагом является отыскание произвольных постоянных интегрирования С1,..., Сn. Для этой цели используются начальные условия: при
 . Начальные условия накладываются на основании физических соображений или находятся из дифференциального уравнения (7.4). Дифференцируя уравнение (7.5) по времени n — 1 раз и используя начальные условия, получают п алгебраических уравнений, куда входят п неизвестных постоянных интегрирования. Совместное решение этих уравнений дает возможность определить искомые постоянные интегрирования С1, . . ., Сn.
. Начальные условия накладываются на основании физических соображений или находятся из дифференциального уравнения (7.4). Дифференцируя уравнение (7.5) по времени n — 1 раз и используя начальные условия, получают п алгебраических уравнений, куда входят п неизвестных постоянных интегрирования. Совместное решение этих уравнений дает возможность определить искомые постоянные интегрирования С1, . . ., Сn.
Операции вычисления корней и совместного решения алгебраических уравнений являются трудоемкими. Это особенно относится ко второй операции, так как вычисление корней может быть сделано довольно быстро приближенными методами. В связи с этим использование этого метода построения кривой переходного процесса ограничивается случаем сравнительно невысокого порядка дифференциального уравнения, обычно не выше третьего.
Расчеты получаются более простыми в том случае, когда правая часть (7.4) равна нулю, т. е. имеется однородное дифференциальное уравнение. Тогда частное решение равно нулю и полное решение (7.5) приобретает более простой вид:
 (7.6)
(7.6)
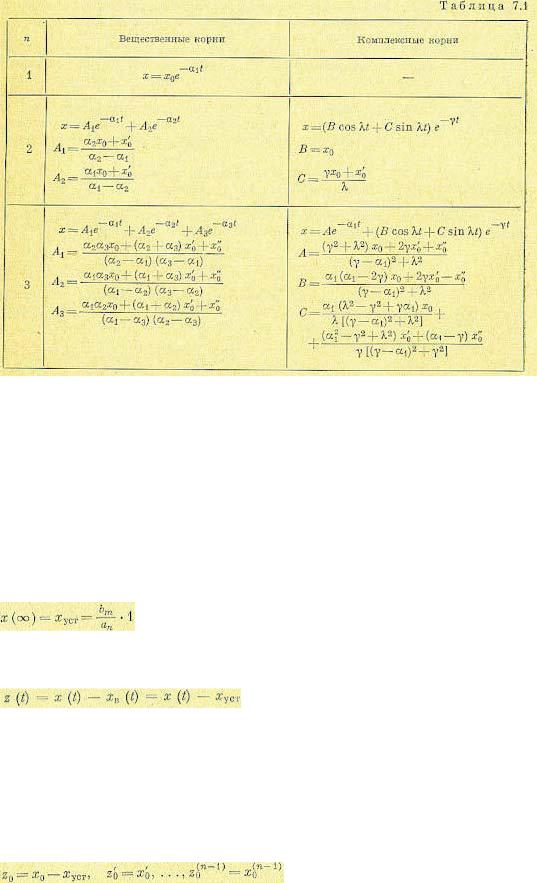
В этом случае переходный процесс определяется только видом корней и начальными условиями. В табл. 7.1 для этого случая приведены формулы для получающегося переходного процесса при различных степенях дифференциального уравнения п (от 1 до 3) и корнях различного вида. В таблице приняты следующие обозначения:
 — абсолютные значения вещественных некратных корней;
— абсолютные значения вещественных некратных корней;  — абсолютные значения вещественной и мнимой частей комплексного корня; х0 —
— абсолютные значения вещественной и мнимой частей комплексного корня; х0 —
начальное значение исследуемой координаты;  — начальное значения скорости изменения исследуемой координаты;
— начальное значения скорости изменения исследуемой координаты;  — начальное значение ускорения.
— начальное значение ускорения.
§ 7.3. Сведение неоднородного уравнения к однородному
Для типового входного воздействия вида единичной ступенчатой функции решение неоднородного уравнения (7.4) может быть сведено к решению уравнения без правой части переходом к другой переменной. Примем, что f(t) = 1(t), причем единица имеет размерность переменной, стоящей в правой части (7.4). Тогда установившееся значение переменной х при  можно найти из (7.4), положив все производные равными нулю:
можно найти из (7.4), положив все производные равными нулю:
Это установившееся значение представляет собой частное или вынужденное
решение неоднородного уравнения (7.4), т. е.  . Введем новую переменную
. Введем новую переменную
Решение неоднородного уравнения (7.4) для z (t) может быть записано в виде
 (7.9)
(7.9)
что подобно решению типа (7.6). Этому решению соответствует исходное дифференциальное уравнение без правой части
 (7101)
(7101)
Из уравнения (7.8) нетрудно определить связь между начальными условиями для исходной переменной х и новой; переменной z при t = 0:

После нахождения решения для переменной z по формуле (7.8) можно легко вернуться к исходной переменной х смещением решения на величину xуст.
Однако эти рассуждения пока справедливы для случая, когда степень операторного многочлена в правой части (7.4) равна нулю (m = 0) и дифференциальное уравнение (7.4) имеет вид
Это происходит потому, что, вообще говоря, необходимо различать начальные условия, которые существовали в системе до приложения возмущения, т. е. при времени t=-0, и непосредственно сразу после его приложения, т. е. при времени t=+0. Остановимся на этом вопросе более подробно в случае приложения возмущения типа ступенчатой функции.
Для простоты расчетов для времени t = — 0 почти всегда принимают нулевые начальные условия, т.е.  и т. д. В дальнейшем под нулевыми начальными условиями будем понимать именно эти равенства.
и т. д. В дальнейшем под нулевыми начальными условиями будем понимать именно эти равенства.
Начальные условия, которые будут иметь место непосредственно после приложения ступенчатой функции, т.е. при t = + 0 (обозначим их x+0, х'+0, х"+0 и т. д.), можно определить из исходного дифференциального уравнения (7.4). Не останавливаясь на доказательстве, приведем конечные результаты. Для первых n-m начальных условий имеют место равенства
 (7.11)
(7.11)
Таким образом, для самой координаты и первых (n-m-1) производных нулевые начальные условия сохраняются и после приложения ступев-чатой функции.
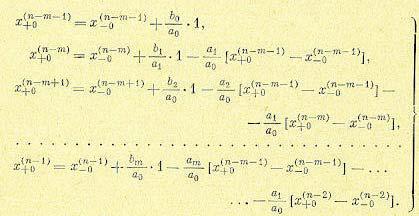
Для остальных начальных условий выполняются соотношения
 (7.12)
(7.12)
Эти формулы показывают, что только при m = 0, т. е. для дифференциального
уравнения  при скачке f (t), начальные условия при t = + 0 соответствуют начальным условиям при t = — 0. В формулах (7.12) множитель 1 имеет размерность величины f (t). Если воздействие прикладывается в виде скачка, не равного единице, то вместо 1 следует поставить величину скачка.
при скачке f (t), начальные условия при t = + 0 соответствуют начальным условиям при t = — 0. В формулах (7.12) множитель 1 имеет размерность величины f (t). Если воздействие прикладывается в виде скачка, не равного единице, то вместо 1 следует поставить величину скачка.
Пример. Найдем реакцию системы на единичную ступенчатую функцию при нулевых начальных условиях, т. е. переходную функцию, если дифференциальное уравнение имеет вид
Для простоты примем, что переменная х является безразмерной величиной. Решая характеристическое уравнение  , находим корни:
, находим корни:
Согласно заданным условиям  . Так как в данном случае n=2 и m=1, то начальные условия для t = + 0, в соответствии с (7.11) и (7.12), будут
. Так как в данном случае n=2 и m=1, то начальные условия для t = + 0, в соответствии с (7.11) и (7.12), будут
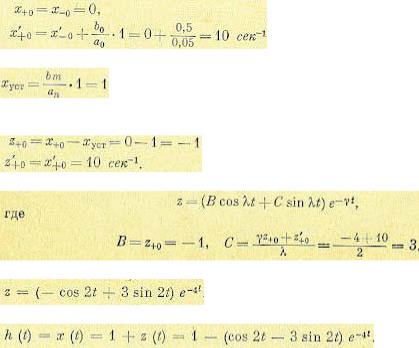
Определяем установившееся значение искомой координаты:
Введем новую переменную z(t) = х(t) — 1 . Начальные условия для новой переменной:
На основании табл. 7.1 для n =2 и случая комплексных корней имеем
Таким образом
Возвращаясь к исходной координате, получаем переходную функцию
Аналогичным образом можно осуществить переход от неоднородного дифференциального уравнения (7.4) к уравнению без правой части при воздействии типа импульсной функции. В этом случае установившееся значение xуст=0, так как в случае
 . Поэтому нет нужды вводить новую смещенную величину z(t) и задача заключается только в отыскании начальных условий при t = + 0.
. Поэтому нет нужды вводить новую смещенную величину z(t) и задача заключается только в отыскании начальных условий при t = + 0.
Так как единичная импульсная функция является производной от единичного скачка  , то формулы пересчета начальных условий можно получить из (7.11) и (7.12), если заменить в них m на m + 1 и положить bm+1 = 0. Тогда вместо (7.11) для первых n-m-2 начальных условий получим
, то формулы пересчета начальных условий можно получить из (7.11) и (7.12), если заменить в них m на m + 1 и положить bm+1 = 0. Тогда вместо (7.11) для первых n-m-2 начальных условий получим
 (7.13)
(7.13)
и вместо (7.12) для всех остальных начальных условий
 (7.14),
(7.14),
В формулах (7.14) единица имеет размерность импульса величины f(t), т. е. размерность f(t), умноженную на время. Если воздействие поступает в виде неединичного импульса, то в эти формулы вместо единицы необходимо подставить заданную величину импульса.
Как видно из (7.14), при воздействии в виде импульса, в отличие от скачка, даже для
дифференциального уравнения вида  не будет равенства начальных условий для t=+0 и t =—0, так как будет скачок в значении (n—1)-й производной. Скачок
не будет равенства начальных условий для t=+0 и t =—0, так как будет скачок в значении (n—1)-й производной. Скачок
же первой производной х', т. е. перелом кривой, будет уже при m-n-2, а скачок самой величины х — при m=n—1.
Пример. Найдем реакцию системы на единичный импульс при нулевых начальных условиях, т. е. функцию веса для дифференциального уравнения, приведенного в предыдущем примере (стр. 233).
Так как в рассматриваемом примере m=n-1, то в соответствии с (7.14) получим
В соответствии с табл. 7.1 для n = 2 и комплексных корней
 ,
,
где
Окончательно получаем функцию веса
Этот результат можно было получить также непосредственным путем для h(t), полученного в предыдущем примере, так как  .
.
§ 7.4. Использование преобразований Фурье, Лапласа и Карсона — Хевисайда
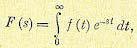
Как известно, периодическая функция времени, подчиняющаяся условиям Дирихле, может быть разложена в ряд Фурье:
 ,
,
где k — порядок гармоники, а  — основная круговая частота. Этот ряд может быть представлен также в комплексной форме:
— основная круговая частота. Этот ряд может быть представлен также в комплексной форме:
где комплексный коэффициент Сk определяется выражением
Таким образом, периодическая функция времени может быть представлена в виде совокупности дискретных гармоник с интервалом по частоте между соседними гармониками, равным основной частоте  .
.
Непериодическая функция времени может рассматриваться как периодическая с периодом, стремящимся к бесконечности. В этом случае вместо приведенных формул получаются два интегральных уравнения Фурье, связывающих оригинал, т. е. функцию
времени f(t), и ее частотное изображение  , которое называется также преобразованием Фурье:
, которое называется также преобразованием Фурье:

В отличие от разложения в ряд Фурье здесь получается разложение в непрерывный спектр частот с интервалом по частоте между соседними гармониками, равным
бесконечно малой величине  .
.
Недостатком интеграла Фурье является то, что он принадлежит к числу несобственных интегралов и может применяться для так называемых абсолютно интегрируемых функций времени, т. е. для функций времени, удовлетворяющих неравенству
От этого недостатка свободно преобразование Лапласа, связывающее оригинал и изображение следующими интегральными уравнениями:
 (7.17)
(7.17)
 (7.18)
(7.18)
причем функция времени должна быть равна нулю (f (t) = 0) при t < 0. В отличие от преобразования Фурье здесь изображение функции времени является функцией не частоты, а некоторой комплексной величины s = с + jω. Вещественная часть ее представляет собой так называемую абсциссу абсолютной сходимости, которая выбирается так, чтобы удовлетворялось неравенство
Для большинства функций, с которыми приходится иметь дело в регулировании, абсцисса абсолютной сходимости равна нулю, т. е. с = 0. Поэтому для этих функций преобразование Лапласа переходит в преобразование Фурье, если произвести подстановку s = jω
Уравнения (7.17) и (7.18) часто записывают в сокращенном виде:
 (7.19)
(7.19)
Иногда вместо буквы 5 применяется буква р, т. е. изображение Лапласа записывается в виде Р (р), но в этом случае р представляет собой не оператор дифференцирования, а комплексную величину: р = с + ω [В дальнейшем изложении при использовании изображений функции времени комплексная величина будет обозначаться буквой р. Однако при этом необходимо не путать эту величину с оператором дифференцирования
 , который применяется при использовании функции времени (оригиналов)].
, который применяется при использовании функции времени (оригиналов)].
В связи с этим формулы (7.19) и (7.20) могут быть записаны в виде
 (7.20)
(7.20)
В некоторых случаях, особенно в задачах электротехники, используется преобразование Карсона — Хевисайда, которое отличается от преобразования Лапласа дополнительным умножением на величину р:
 (7.21)
(7.21)  (7.22);
(7.22);
Таким образом, между преобразованиями Лапласа и Карсона — Хевисайда существует соотношение
 (7.23)
(7.23)
Преобразование Карсона — Хевисайда нашло распространение наряду с преобразованием Лапласа. Это объясняется тем, что исторически первым для решения дифференциальных уравнений был использован так называемый операторный метод Хевисайда, который, по сути дела, использовал преобразования (7.21) и (7.22).
Кроме того, удобство преобразования Карсона — Хевисайда заключается в том, что изображение постоянной величины А, точнее, ступенчатой функции А·1(t), равно самой постоянной величине, что легко доказывается использованием выражения (7.21). Поэтому во многих случаях преобразование Карсона — Хевисайда сливается с операторной записью дифференциальных уравнений.
Основное достоинство преобразований Фурье, Лапласа и Карсона — Хевисайда заключается в том, что операции дифференцирования и интегрирования оригинала заменяются алгебраическими действиями по отношению к изображениям.
В табл. 7.2 приведены основные формулы и свойства изображений Лапласа и Карсона — Хевисайда. Изображение Фурье может быть получено из= изображения Лапласа подстановкой  .
.
Формулы для дифференцирования и интегрирования оригинала даны для случая нулевых начальных условий.
Для ненулевых начальных условий из (7.17) можно получить изображение по Лапласу производной оригинала (s заменено на р):
 (7.24)
(7.24)
где F (р) — изображение самой функции. Аналогично для второй производной
 (7.25)
(7.25)
и для производной любого порядка
 (7.26)
(7.26)
При нулевых начальных условиях
 (7.27) или
(7.27) или  (7.28)
(7.28)
т. е. операция дифференцирования оригинала заменяется для изображения умножением на комплексную величину р.