

Теория систем автоматического управления. В.А. Бесекерский, Е.П. Попов, 1975
.pdf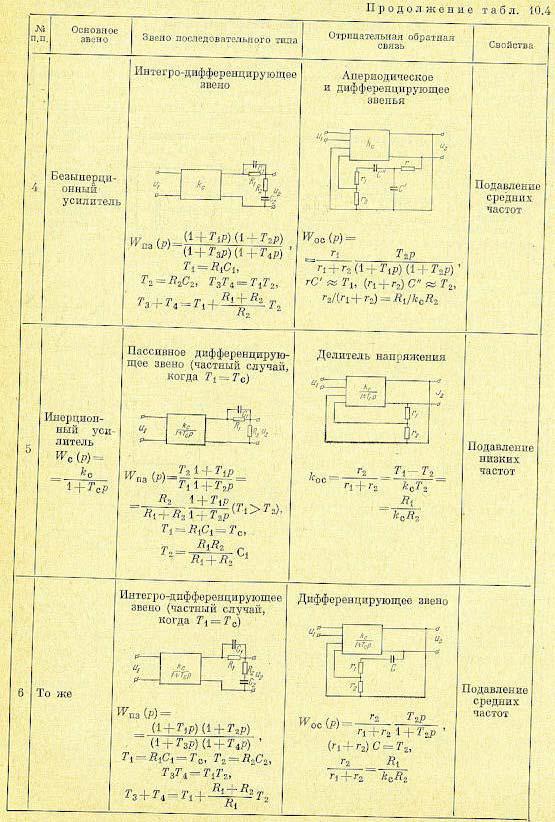
где
В этом случае имеется жесткая обратная связь, так как  , которая превращает интегрирующее звено с замедлением, передаточная функция которого имеет вид (10.24), в колебательное звено с передаточной функцией (10.25). Чем больше коэффициент усиления по петле обратной связи
, которая превращает интегрирующее звено с замедлением, передаточная функция которого имеет вид (10.24), в колебательное звено с передаточной функцией (10.25). Чем больше коэффициент усиления по петле обратной связи  тем выше будет частота недемпфированных колебаний звена
тем выше будет частота недемпфированных колебаний звена 
 и тем меньше параметр затухания ξ.
и тем меньше параметр затухания ξ.
Аналогичный результат можно получить, если вместо обратной связи установить на выходном валу пружину, развивающую момент, пропорциональный углу поворота вала.
Схема на рис. 10.10, б соответствует использованию в цепи обратной связи тахогенератора
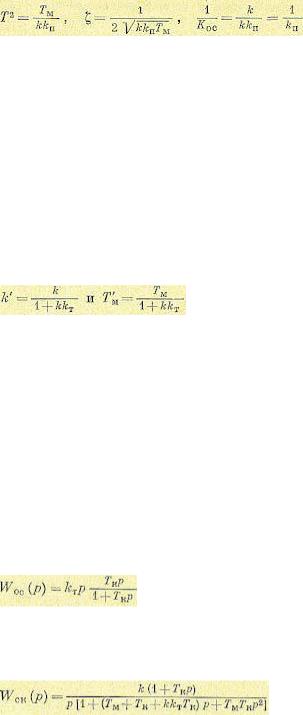
ТГ. В этом случае  , где kт — коэффициент передачи тахогенератора. Результирующая передаточная функция в соответствии с (10.3) будет
, где kт — коэффициент передачи тахогенератора. Результирующая передаточная функция в соответствии с (10.3) будет
 (10.26).
(10.26).
где
Передаточная функция (10.26) отличается от исходной передаточной функции (10.24) только уменьшением в  раз коэффициента передачи и постоянной времени. Если в соответствии с (10.24) в качестве выходной величины рассматривать угол поворота вала двигателя а, то эта обратная связь является гибкой, так как
раз коэффициента передачи и постоянной времени. Если в соответствии с (10.24) в качестве выходной величины рассматривать угол поворота вала двигателя а, то эта обратная связь является гибкой, так как  .
.
Для схемы, изображенной на рис. 10.10, б, в качестве выходной величины можно рассматривать скорость вращения двигателя.1 Тогда обратная связь по напряжению
тахогенератора оказывается жесткой, и в этом случае  .
.
В соответствии с табл. 10.4 (№ 5) этот случай аналогичен включению последовательного пассивного дифференцирующего звена. Аналогичный результат может быть получен при установке на валу двигателя демпфера^ развивающего момент сопротивления, пропорциональный скорости вращения (скоростное трение). В этом случае коэффициент передачи и постоянная времени двигателя уменьшатся в одинаковое число раз.
На рис. 10.10, в изображено введение обратной связи по ускорению. В этом случае передаточная функция цепи обратной связи будет
где Тк = RС — постоянная времени дифференцирующего конденсатора, а kт — коэффициент передачи тахогенератора.
Результирующая передаточная функция для этого случая, в соответствии с формулой (10.3), будет
В соответствии с табл. 10.4 (№ 6) этот случай аналогичен включению последовательного интегро-дифференцирующего звена.
Представляет интерес рассмотрение частного случая, когда можно приближенно считать дифференциатор идеальным (рис. 10.10, в). Тогда передаточная функция цепи обратной связи
будет  , а результирующая передаточная функция двигателя совместно примет вид
, а результирующая передаточная функция двигателя совместно примет вид
 (10.28),
(10.28),
где  — результирующая электромеханическая постоянная времени двигателя. Из формулы (10.28) видно, что обратная связь по ускорению эквивалентна установке на
— результирующая электромеханическая постоянная времени двигателя. Из формулы (10.28) видно, что обратная связь по ускорению эквивалентна установке на
валу двигателя дополнительного маховика, увеличивающего электромеханическую постоянную времени двигателя.
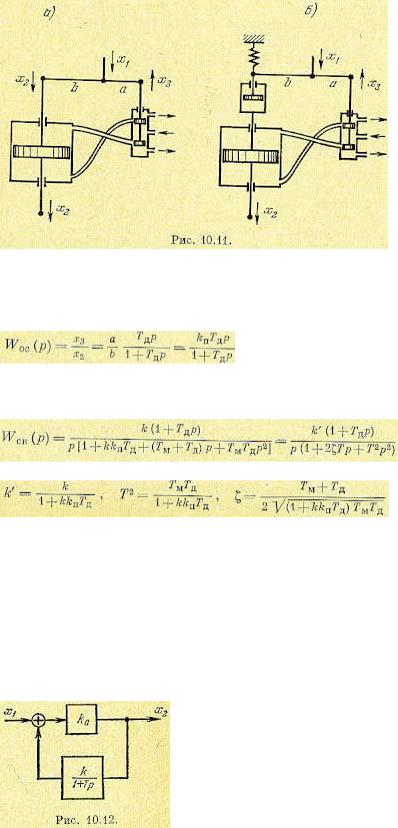
На рис. 10.11 показано введение обратной связи в гидравлическом серводвигателе. Случай, изображенный на рис. 10.11, а, соответствует жесткой отрицательной обратной связи или так называемому серводвигателю с выключателем. Передаточная функция серводвигателя без обратной связи, определяемая по отношению перемещений х1 и х2, соответствует (10.24).
Передаточная функция цепи обратной связи 
 , где а и b — плечи рычага. В результате этот случай сводится к рассмотренной выше схеме,
, где а и b — плечи рычага. В результате этот случай сводится к рассмотренной выше схеме,
изображенной на рис. 10.10, а. Результирующая передаточная функция будет совпадать с (10.25). Рис. 10.11, б соответствует гибкой обратной связи, передаточная функция которой
где Tд — постоянная времени дифференцирующего устройства, состоящего из демпфера и пружины (см. рис. 4.24, г).
Результирующая передаточная функция в соответствии с формулой (10.3) будет
где
Из формулы (10.29) видно, что подобная гибкая обратная связь сохраняет интегрирующие свойства серводвигателя, уменьшает его коэффициент передачи, вводит производную в соответствии с членом (1 + Тдр) и образует колебательное звено с частотой недемпфированных колебаний  и параметром затухания ξ. Если частота q достаточно велика, то выражение (10.29) можно приближенно записать в виде
и параметром затухания ξ. Если частота q достаточно велика, то выражение (10.29) можно приближенно записать в виде
 (10.30)
(10.30)
Передаточная функция (10.30) совпадает с передаточной функцией изодромного устройства (9.10). В связи с этим гибкую обратную связь, изображенную на рис. 10.24, б, называют иногда изодромной обратной связью.
Положительные обратные связи. Положительные обратные связи находят значительно меньшее распространение в качестве корректирующих средств по сравнению с отрицательными. Встречается применение положительных обратных связей в качестве так называемых корректоров ошибки (рис. 10.12). Прямая цепь представляет собой безынерционное звено с
передаточной функцией  , а в цепи обратной связи установлено апериодическое звено первого порядка с передаточной функцией
, а в цепи обратной связи установлено апериодическое звено первого порядка с передаточной функцией
 . Результирующая передаточная функция в соответствии с (10.3) будет
. Результирующая передаточная функция в соответствии с (10.3) будет
 (10.31)
(10.31)
При выполнении условия  формула (10.31) будет соответствовать передаточной функции изодромного устройства (9.10). Это позволяет построить изодромное устройство, повышающее астатизм системы, на базе апериодического звена, а не интегратора, как показано
формула (10.31) будет соответствовать передаточной функции изодромного устройства (9.10). Это позволяет построить изодромное устройство, повышающее астатизм системы, на базе апериодического звена, а не интегратора, как показано
на рис. 9.4. Отсутствие интегратора упрощает схему, но точное выполнение требования  затрудняется необходимостью тщательного масштабирования.
затрудняется необходимостью тщательного масштабирования.
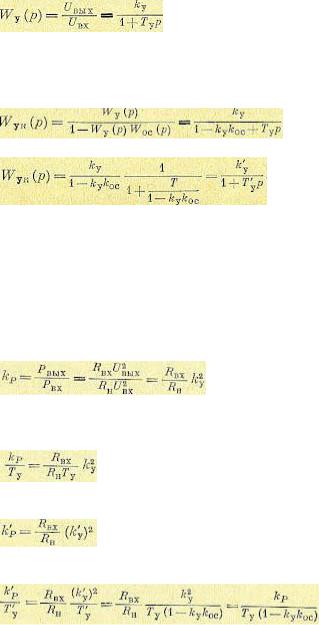
Положительные обратные связи находят также применение в магнитных усилителях с целью уменьшения постоянных времени последних при сохранении коэффициента усиления по мощности. Это делается следующим образом. Предположим, что усилитель имеет передаточную функцию, соответствующую апериодическому звену,
где Tу — постоянная времени усилителя, kу — коэффициент усиления (коэффициент передачи) по напряжению.
При замыкании усилителя положительной жесткой обратной связью -с передаточной функцией  в соответствии с (10.3) имеем результирующую передаточную функцию
в соответствии с (10.3) имеем результирующую передаточную функцию
Эта передаточная функция может быть также представлена в следующем виде:
где
 — новые значения коэффициента усиления по напряжению и постоянной времени усилителя. Нетрудно видеть, что при помощи жесткой положительной обратной связи можно в одинаковое число раз увеличить коэффициент усиления по напряжению и постоянную времени усилителя.
— новые значения коэффициента усиления по напряжению и постоянной времени усилителя. Нетрудно видеть, что при помощи жесткой положительной обратной связи можно в одинаковое число раз увеличить коэффициент усиления по напряжению и постоянную времени усилителя.
Коэффициент усиления усилителя по мощности равен отношению выходной и входной мощностей в установившемся режиме:
где Rн и Rвх — сопротивление нагрузки и входное сопротивление усилителя. Качество усилителя может характеризоваться отношением коэффициента усиления по мощности к постоянной времени:
При введении положительной обратной связи необходимо взять новое значение коэффициента усиления по мощности (Rвх и Rн считаются постоянными)
и новые значения коэффициента усиления по напряжению k’y и постоянной времени T’у. В результате получаем
Таким образом, введение положительной обратной связи позволяет увеличить Отношение коэффициента усиления по мощности к постоянной времени усилителя. При заданном значении
коэффициента усиления по мощности усилитель с положительной обратной связью будет иметь меньшее значение результирующей постоянной времени.
§ 10.5. Методы повышения запаса устойчивости
Повышение запаса устойчивости, или демпфирование, системы регулирования сводится в конечном счете к рациональному перераспределению полюсов и нулей передаточной функции замкнутой системы для задающего или возмущающего воздействия. Передаточная функция замкнутой системы связана с передаточной функцией разомкнутой системы жестким соотношением. Поэтому под демпфированием можно понимать также рациональное перераспределение полюсов и нулей передаточной функции разомкнутой системы.
Ответить на вопрос, каким образом необходимо перераспределить полю сы и нули передаточной функции замкнутой или разомкнутой системы, можно на основании применения критериев устойчивости и критериев качества. Наиболее полно этот вопрос решается при помощи синтеза корректирующих средств. Некоторые методы синтеза будут изложены в главе
12.
Здесь будут рассмотрены только основные идеи, которые используются при изменении динамических свойств системы с целью повышения запаса устойчивости. Рассмотрение может вестись на основании различных критериев качества. Здесь это будет сделано на наиболее наглядных примерах, использующих амплитудно-фазовую характеристику разомкнутой системы.
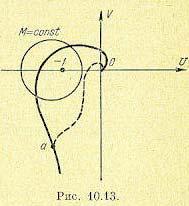
На рис. 10.13 изображена ветвь амплитудно-фазовой характеристики при положительных частотах для системы регулирования с астатизмом первого порядка. Будем предполагать, что в разомкнутом состоянии система устойчива (не имеет полюсов в правой полуплоскости). Тогда по виду амплитудно-фазовой характеристики можно установить, что в замкнутом состоянии система будет неустойчивой. Это вытекает из того, что характеристика охватывает точку (—1, j0). Задачей демпфирования является такая деформация амплитудно-фазовой характеристики, в результате которой характеристика не только не будет охватывать точку (—1, j0), но будет достаточно удалена от этой точки. Величину требуемого удаления характеристики от точки (—1, j0) можно установить, воспользовавшись каким-либо критерием качества. Здесь наиболее просто использовать показатель колебательности. Тогда амплитудно-фазовая характеристика не должна заходить в окружность, соответствующую заданному значению показателя колебательности М=const.
Деформация амплитудно-фазовой характеристики с целью получения устойчивости, а также запаса устойчивости .может производиться посредством использования корректирующих звеньев различного типа: последовательных, параллельных и обратных связей. Так как в линейной системе для каждого звена какого-либо типа может быть найдено эквивалентное звено другого типа, то достаточно рассмотреть действие звеньев одного определенного типа. Наиболее наглядно может быть прослежено действие последовательных корректирующих звеньев, и для них наиболее просто могут быть вычислены требуемые параметры. Поэтому в дальнейшем в основном будут рассматриваться последовательные корректирующие звенья.
Деформация амплитудно-фазовой характеристики может быть произведена четырьмя основными способами, которые будут рассмотрены ниже в отдельности.
Демпфирование с подавлением высоких частот. Выведение амплитудно-фазовой характеристики из запретной зоны (рис. 10.13) может быть осуществлено посредством подавления пропускания разомкнутой системой всех частот, которые превышают частоту ω0, соответствующую некоторой точке а на характеристике. Тогда амплитудно-фазовая характеристика примет вид, изображенный на рис. 10.13 пунктиром. Как видно из этого рисунка, деформированной характеристике будет соответствовать замкнутая система, которая является не только устойчивой, но и имеющей необходимый запас устойчивости.
Подавление усиления на высоких частотах всегда сопровождается появлением отрицательных фазовых сдвигов. Поэтому этот метод демпфирования может также называться демпфированием с внесением отрицательных фазовых сдвигов.
Подавление высоких частот может осуществляться различными способами. Наиболее просто это получается при введении последовательно в цепь регулирования апериодического звена первого порядка с относительно большой постоянной времени и коэффициентом передачи k=1. Передаточная функция такого звена
 (10.32)
(10.32)
Легко показать, что подобное звено может всегда привести к получению желаемого запаса устойчивости в статических системах регулирования с минимально-фазовыми звеньями. Пусть, например, передаточная функция разомкнутой статической системы регулирования имеет вид
 (10.ЗЗ)
(10.ЗЗ)
где  - вещественные или комплексные постоянные времени с положительными вещественными частями, а К — общий коэффициент усиления, лежащий в пределах
- вещественные или комплексные постоянные времени с положительными вещественными частями, а К — общий коэффициент усиления, лежащий в пределах  [Случай наличия консервативных звеньев здесь не рассматривается.].
[Случай наличия консервативных звеньев здесь не рассматривается.].
Пусть л.а.х. и л.ф.х. соответствуют неустойчивой системе в замкнутом состоянии (рис. 10.14). Это определяется гем, что точка 2 лежит левее точки 1. Тогда, каковы бы ни были значения постоянных времени, входящих в (10.53), всегда можно отыскать такую частоту ωн что для всех частот  л. а. х. будет сколь угодно мало отличаться от первой низкочастотной
л. а. х. будет сколь угодно мало отличаться от первой низкочастотной
асимптоты  , а фазовый сдвиг — от нулевого. Если ввести теперь последовательно в цепь регулирования апериодическое звено первого порядка с передаточной функцией (10.32) так, чтобы положительные ординаты л. а. х. располагались только в области частот
, а фазовый сдвиг — от нулевого. Если ввести теперь последовательно в цепь регулирования апериодическое звено первого порядка с передаточной функцией (10.32) так, чтобы положительные ординаты л. а. х. располагались только в области частот  (пунктирные характеристики на рис. 10.14), то в результате получится устойчивая система. Это вытекает из того, что левее частоты среза л. а. х. (точка 3 на рис. 10.14) передаточная функция разомкнутой системы со сколь угодно большой точностью может быть представлена в виде
(пунктирные характеристики на рис. 10.14), то в результате получится устойчивая система. Это вытекает из того, что левее частоты среза л. а. х. (точка 3 на рис. 10.14) передаточная функция разомкнутой системы со сколь угодно большой точностью может быть представлена в виде
 (10.34)
(10.34)
Этой передаточной функции соответствует устойчивая в замкнутом состоянии система. Все остальные постоянные времени передаточной функции (10.33) не смогут нарушить устойчивости либо запаса устойчивости, так как соответствующие им сопрягающие частоты лежат значительно правее частоты среза л. а. х. и они могут деформировать только высокочастотные «хвосты» л. а. х. и л. ф. х. Получается, что введение большой постоянной времени Т0 , делает все остальные постоянные времени относительно малыми, в результате чего и достигается эффект демпфирования.
Из рис. 10.14 видно, что этот результат может быть получен при любой положительной величине общего коэффициента усиления. Если зафиксировать положение точки 3, соответствующей частоте среза ωс, то запас устойчивости в системе не будет нарушаться при сколь угодно большом увеличении К и одновременном увеличении Т0. Для этого нужно только выполнить условие
 (Ю.35)
(Ю.35)
Демпфирование статических систем может быть осуществлено и более сложными корректирующими звеньями, вносящими подавление высоких частот и отрицательные фазовые сдвиги, например при помощи пассивного интегрирующего звена (табл. 10.1) или его аналогов
(табл. 10.4).
Также можно показать, что в астатических системах первого порядка, состоящих из минимально-фазовых звеньев, желаемый запас устойчивости может быть всегда получен при введении последовательного пассивного интегрирующего звена, имеющего передаточную функцию вида
 (10.36)
(10.36)
Цель будет всегда достигнута при достаточно больших значениях постоянных времени Т1 и Т2. Эффект демпфирования достигается здесь за счет того, что при увеличении Т1 и Т2 результирующая передаточная функция разомкнутой системы с любой степенью точности может быть представлена в виде произведения (10.36) и сомножителя К/р, а постоянные времени системы оказываются относительно малыми.
В астатических системах второго порядка требуемый запас устойчивости может быть получен при помощи подавления высоких частот только в некоторых случаях.
Достоинством демпфирования с подавлением высоких частот является то что система регулирования оказывается менее подверженной действию высокочастотных помех, так как корректирующее звено представляет собой фильтр низких частот.
Недостатком демпфирования с подавлением высоких частот является то, что снижение полосы пропускания системы означает понижение быстродействия. Поэтому такой метод демпфирования может применяться в тех случаях, когда снижение быстродействия системы является допустимым.
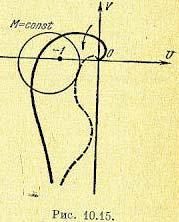
Демпфирование с поднятием высоких частот. Выведение амплитудно-фазовой характеристики из запретной зоны может быть произведено поворотом ее высокочастотной части в положительном направлении, т. е. против часовой стрелки. Это показано [пунктиром на рис. 10.15.
Положительный фазовый сдвиг (фазовое упреждение) может быть получен посредством включения в канал регулирования звеньев дифференцирующего типа.
Если параллельно части основного канала регулирования включить идеальное дифференцирующее звено (рис. 10.6), то результирующая передаточная функция будет иметь вид
Рис. 10.15.
 (10.37)
(10.37)
При введении такого звена будет получен дополнительный положительный фазовый сдвиг
 (10.38)
(10.38)
В области высоких частот фазовый сдвиг близок к 90°. Это и вызывает «закручивание» амплитудно-фазовой характеристики в высокочастотной области (рис. 10.15).
Одновременно с положительным фазовым сдвигом звено увеличивает пропускание высоких частот, так как модуль его частотной передаточной функции
 (10.39) будет тем больше, чем выше частота.
(10.39) будет тем больше, чем выше частота.
В случае, если положительный фазовый сдвиг, вносимый дифференцирующим звеном, является недостаточным для выведения амплитудно-фазовой характеристики из запретной зоны, могут применяться два дифференцирующих звена, включенных последовательно, что соответствует введению первой и второй производных от сигнала ошибки. Для идеальных дифференцирующих звеньев передаточная функция будет иметь вид
 (10.40)
(10.40)
Дополнительный фазовый сдвиг в этом случае будет
 (10.41)
(10.41)
Поднятие высоких частот будет здесь еще более заметным, так как модуль частотной передаточной функции этих звеньев
 (10.42)
(10.42)
Реализация дифференцирующего звена, близкого к идеальному, может быть осуществлена, например, при использовании в следящей системе воспроизведения угла тахогенераторов. Этот случай будет описан ниже при рассмотрении конкретного примера. Хорошие результаты дает также применение гиротахометров и дифференцирующих операционных усилителей.
В системах автоматического регулирования наиболее часто употребляются пассивные дифференцирующие звенья, подобные рассмотренным в § 10.2 (см. табл. 10.1). Однако из табл. 10.1 следует, что положительный фазовый сдвиг вносится этими звеньями не за счет поднятия высоких, а за счет подавления низких частот. Это вытекает из вида их передаточной функции:
 (10.43)
(10.43)
В установившемся состоянии коэффициент передачи звена G0 < 1. Поэтому введение такого
звена в канал регулирования снижает общий коэффициент усиления разомкнутой цепи в  раз. С точки зрения выполнения требований по точности допустить такое снижение
раз. С точки зрения выполнения требований по точности допустить такое снижение
коэффициента усиления нельзя. Поэтому одновременно с включением в цепь пассивного дифференцирующего звена необходимо предусмотреть восстановление прежнего коэффициента усиления при помощи введения дополнительного усилителя или поднятия коэффициента усиления имеющегося усилителя. В результате общая передаточная функция пассивного дифференцирующего звена вместе с дополнительным усилителем будет иметь вид
 (10.44)
(10.44)
Дополнительный фазовый сдвиг
 (10.45)
(10.45)
Модуль частотной передаточной функции в этом случае
 (10.46)
(10.46)
показывает на поднятие высоких частот. При ω = 0 коэффициент передачи
т\ А (0) = 1, и при ω→∞ имеем  .
.
Логарифмические частотные характеристики пассивного дифференцирующего звена совместно с дополнительным усилителем, компенсирующим затухание, вносимое звеном на низких частотах, изображены на рис. 10.16.
Здесь же пунктиром изображены характеристики идеального дифференцирующего звена, имеющего передаточную функцию вида (10.37). Как видно из сравнения этих характеристик, пассивное звено, в отличие от идеального, дает положительный фазовый сдвиг в ограниченной области частот при ограниченном поднятии высоких частот.
Аналогичный эффект дает применение отрицательных обратных связей, содержащих апериодическое звено (табл. 10.4).
Характеристика, подобная изображенной на рис. 10.16, может быть получена также при использовании активного дифференцирующего звена, состоящего из операционного усилителя (в режиме дифференцирования), включенного параллельно основному каналу регулирования в соответствии со схемой, изображенной на рис. 10.6.

Демпфирование посредством поднятия высоких частот или, соответственно, введение упреждения по фазе является универсальным методом, так как позволяет получить требуемый результат практически при любых передаточных функциях исходной системы, в том
числе и при наличии в канале регулирования неминимально-фазовых звеньев. Однако это не означает, что данный метод может быть рекомендован для использования во всех случаях. Поднятие верхних частот расширяет полосу пропускания системы, что приводит к увеличению ее быстродействия и одновременно усиливает влияние на систему высокочастотных помех. При большом уровне помех на входе или в канале регулирования поднятие верхних частот может привести к неприемлемым результатам. Поэтому данный метод демпфирования имеет ограниченную сферу применения. Она определяется, в основном, теми случаями, когда введение положительного фазового сдвига является принципиально необходимым для
получения устойчивой работы, а также теми случаями, когда необходимо повысить быстродействие системы при допустимости возрастания влияния высокочастотных помех. В некоторых случаях при поднятии верхних частот приходится предусматривать меры одновременного подавления высокочастотных помех путем введения специальных узкоили широкополосных фильтров. Иногда задача может оказаться вследствие этого весьма сложной.
Демпфирование с подавлением средних частот. Выведение амплитудно-фазовой характеристики из запретной зоны (рис. 10.17) может быть произведено при помощи подавления усиления в области частот, соответствующей отрезку характеристики между точками а и b. В результате будет получена характеристика, изображенная на рис. 10.17 пунктиром.
Подавление средних частот может быть осуществлено включением в цепь регулирования последовательного интегро-дифференцирующего звена (табл. 10.1), имеющего л. а. х., изображенную хам же. Из вида л. а. х. вытекает, что звено подавляет усиление в некоторой области «средних» частот. Вместо пассивного интегро-дифференцирующего звена могут применяться его эквиваленты, например гибкая отрицательная обратная связь, охватывающая инерционный усилитель (табл. 10.4).
По своим свойствам демпфирование с подавлением средних частот занимает промежуточное положение между двумя рассмотренными методами. При демпфировании с подавлением средних частот сохраняется быстродействие системы и сохраняется полоса пропускания. Этот вид демпфирования является наиболее распространенным.