

Теория систем автоматического управления. В.А. Бесекерский, Е.П. Попов, 1975
.pdfАсимптотическая л. а. х. представляет собой две прямые с отрицательными наклонами -20 дб/дек (при w<1/T) и -40 дб/дек (при w >1/T).
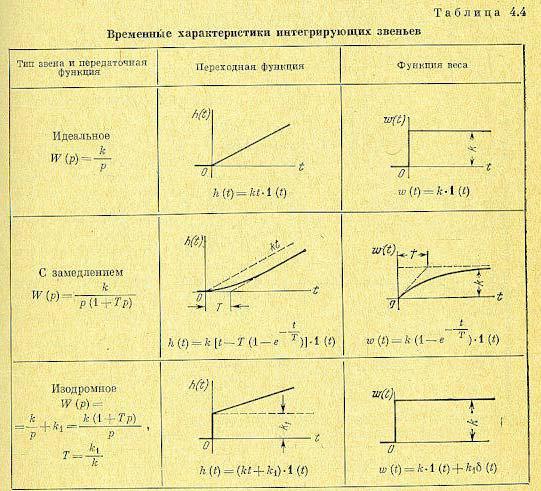
3. Изодромное звено. Звено описывается уравнением
|
dx2 |
= kx |
+ k |
|
dx1 |
|
(4.49) |
||||
|
dt |
|
dt |
||||||||
|
|
1 |
|
|
1 |
|
|
||||
Передаточная функция звена |
|
|
|
k(1+Tp) |
|
||||||
W ( p) = |
k |
+ k1 |
= |
, (4.50) |
|||||||
|
|
||||||||||
|
|
|
p |
|
|
|
|
p |
|
|
|
где T=k1/k — постоянная времени изодромного звена.
Из этих выражений видно, что звено можно условно представить в виде совокупности двух звеньев, действующих параллельно,— идеального интегрирующего с коэффициентом передачи k и безынерционного с коэффициентом передачи k1.
 .
.
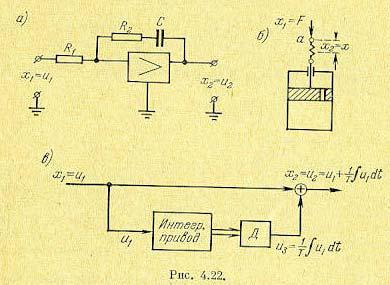
Примеры изодромных звеньев изображены на рис. 4.22. Таким звеном может быть комбинация пружины с демпфером (рис. 4.22, б). В качестве входной величины здесь рассматривается прикладываемая сила F, а в качестве выходной — перемещение х точки а, в которой приложена сила. Это перемещение складывается из деформации пружины
F
c
где с — жесткость пружины, и перемещения поршня
S1 ∫Fdt,
где S — коэффициент скоростного сопротивления демпфера. Результирующее перемещение точки
x = Fc + S1 ∫Fdt,
При использовании операционного усилителя (рис. 4.22, а) изодромное звено может быть получено посредством применения RС-цепи в обратной связи.
В системах управления часто находят применение изодромные звенья, построенные на базе интегрирующего привода (рис. 4.22, в). В этом случае входное напряжение u1 поступает непосредственно на выход. Кроме того, это же напряжение поступает на вход интегрирующего привода. Угол поворота валика последнего, в соответствии с изложенным выше, пропорционален интегралу от входного напряжения u1. На выходном валике устанавливается какой-либо датчик (Д) представляющий собой линейный преобразователь угла поворота в напряжение, например потенциометр или линейный

вращающийся трансформатор. Напряжение этого преобразователя u3 суммируется с напряжением u1. Эта сумма и представляет собой выходное напряжение u2.
Рис |
|
|
|
|
|
Таким образом, для схемы, |
изображенной на рис. 4.22, в, |
||||
U 2 |
( p) = (1+ |
1 |
)U1 ( p) = |
1+Tp |
U1 ( p), |
Tp |
|
||||
|
|
|
Tp |
||
где Т —.коэффициент пропорциональности между скоростью изменения выходного напряжения датчика интегрирующего привода и напряжением на его входе. Коэффициент передачи идеального интегрирующего звена в этом случае равен k=1/T .
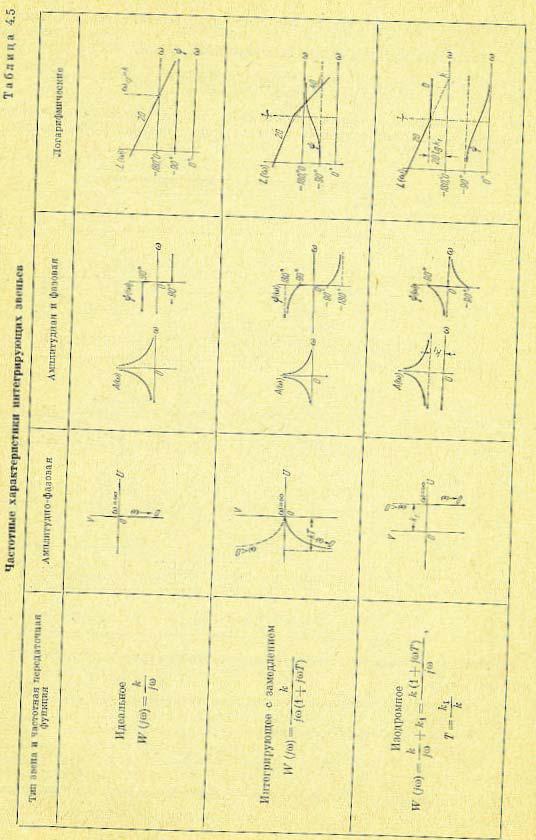
Временные характеристики звена представлены в табл. 4.4, а частотные — в табл.
4.5.
Л. а. х. строится по выражению
L(w) = 20 lg k  1 + w2T 2 w
1 + w2T 2 w
Асимптотическая л. а. х. представляет собой две прямые: с отрицательным наклоном 20 дб/дек (при w <1/T) и параллельную оси частот (при w >1/T).
 .
.
Из рассмотрения л. а. х. и л. ф. х. видно, что в области малых частот (меньших, чем сопрягающая частота) звено ведет себя как идеальное интегрирующее и тем точнее, чем меньше частота.
В области больших частот (больших, чем сопрягающая частота) звено ведет себя как безынерционное с коэффициентом передачи k1.
Свойство звена вводить интегрирующее действие в области малых частот используется для улучшения качественных показателей систем автоматического регулирования (см. главу 9).
§4.7. Дифференцирующие звенья
1.Идеальное дифференцирующее звено. Звено описывается уравнением
x2 = k |
dx1 |
(4-51) |
|
dt |
|||
|
|
Передаточная функция звена

W ( p) = kp (4.52)
Примеры идеальных дифференцирующих звеньев изображены на рис. 4.23. Единственным идеальным дифференцирующим звеном, которое точно описывается уравнением (4.51), является тахогенератор постоянного тока (рис. 4.23, а), а если в качестве входной величины рассматривать угол поворота его ротора α , а в качестве выходной — э. д. с. якоря e. В тахогенераторе постоянного тока при неизменном потоке возбуждения э. д. с. в якоре пропорциональна скорости вращения: e = kΩ. Скорость
вращения есть производная по времени от угла поворота: Ω = ddtα . Следовательно,
e = k |
dα |
.В режиме, близком к холостому ходу (сопротивление нагрузки велико), |
|
dt |
|||
|
|
можно считать, что напряжение якоря равно э. д. с.: u = е. Тогда u = k ddtα .
 .
.
Приближенно в качестве идеального дифференцирующего звена может рассматриваться операционный усилитель в режиме дифференцирования (рис. 4.23, б).
Временные характеристики приведены в табл. 4.6, а частотные — в табл. 4.7. 2. Дифференцирующее звено с замедлением. Звено описывается уравнением
T |
dx2 |
+ x2 |
= k |
dx1 |
(4.53) |
||||
dt |
|
dt |
|||||||
|
|
|
|
|
|
|
|||
Передаточная функция звена |
|
|
|
kp |
|
|
|||
W ( p) = |
|
|
(4.54) |
||||||
1 |
+Tp |
||||||||
|
|
|
|
||||||
Звено условно можно представить в виде двух включенных последовательно звеньев
— идеального дифференцирующего и апериодического первого порядка.
На рис. 4.24 изображены примеры дифференцирующих звеньев с замедлением. Наиболее часто употребляются электрические цепи (рис. 4.24, а, б и в). В некоторых случаях используются дифференцирующие устройства, состоящие из гидравлического демпфера и пружины (рис. 4.24, г).

 .
.
Составим, например, уравнение для дифференцирующего конденсатора (рис. 4.24, а). Ток в рассматриваемой цепи определяется уравнением
Ri + C1 ∫idt = u1 .
Переходя к изображениям и решая это уравнение относительно тока, получаем:
I ( p) = |
U1 ( p) |
= |
|
pC |
U |
( p). |
|
|
1 |
1 + RCp |
|||||
|
R + |
|
1 |
|
|||
|
pC |
|
|
|
|
|
|
Рис.
Напряжение на выходе цепи
U 2 ( p) = RI ( p) = 1+TpTp U1 ( p)
где Т = RС — постоянная времени цепи.
Временные характеристики звена приведены в табл. 4.6, а частотные — в табл. 4.7. Амплитудная частотная характеристика имеет иной вид, чем у идеального звена.
Характеристики совпадают в области низких частот. В области высоких частот реальное звено пропускает сигнал хуже, чем идеальное звено. Коэффициент передачи стремится к

значению k/T при w → ∞. Для звеньев, представляющих собой RСили RL-цепь (рис. 4.24, а и б), k = Т и на высоких частотах коэффициент передачи стремится к единице.
Фазовые сдвиги, вносимые звеном, являются наибольшими при низких частотах. На высоких частотах фазовый сдвиг постепенно уменьшается, стремясь в пределе к нулю при w → ∞. Здесь также видно, что это звено ведет себя подобно идеальному только в области низких частот.
Л. а. х. строится по выражению

L(w) = 20 lg |
kw |
(4.55) |
|
1 + w2T 2 |
|||
|
|
Асимптотическая л. а. х. может быть представлена в виде двух прямых. Одна из них имеет положительный наклон 20 дб/дек (при w < 1/T), а вторая—параллельна оси частот
(при w>1/T).
§ 4.8. Неустойчивые и неминимально-фазовые звенья
Рассмотренные выше звенья позиционного типа относятся к устойчивым звеньям, или к звеньям с самовыравниванием. Под самовыравниванием понимается способность звена самопроизвольно приходить к новому установившемуся значению при ограниченном изменении входной величины или возмущающего воздействия. Термин самовыравнивание обычно применяется для звеньев, представляющих собой объекты регулирования.
Существуют звенья, у которых ограниченное изменение входной величины или возмущающего воздействия не вызывает прихода звена к новому установившемуся состоянию, а выходная величина имеет тенденцию неограниченного возрастания во времени. К таким звеньям относятся, например, звенья интегрирующего типа. Они были рассмотрены выше.
Существуют звенья, у которых этот процесс выражен еще заметнее. Это объясняется наличием положительных вещественных корней или комплексных корней с положительной вещественной частью в характеристическом уравнении (знаменателе передаточной функции, приравненном нулю), в результате чего звено будет относиться к категории неустойчивых звеньев. Вопрос устойчивости будет изложен подробно в главе 6. Рассмотрим в качестве примера звено, описываемое дифференциальным уравнением
T |
dx2 |
|
− x |
2 |
= kx |
(4-56) |
|||||
|
|
||||||||||
|
dt |
|
|
|
|
|
1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
которому соответствует передаточная функция |
|
|
|||||||||
W ( p) = |
|
|
|
|
k |
|
(4-57) |
||||
|
−1 |
+Tp |
|||||||||
|
|
|
|
|
|
|
|||||
Переходная функция такого звена |
представляет |
собой показательную функцию с |
|||||||||
положительным показателем степени: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
h(t) = k(e |
T |
−1) 1(t) |
(4-58) |
||||||||
Эта функция изображена на рис. 4.25.
Таким звеном может быть, например, двигатель любого типа (рис. 4.13, а), если его механическая характеристика, т. е. зависимость вращающего момента от скорости вращения M = f (Ω) , имеет положительный наклон. На рис. 4.26 изображены
разновидности механических характеристик двигателя. В случае, соответствующем кривой 1, двигатель представляет собой устойчивое апериодическое звено первого порядка, уравнения движения которого были рассмотрены в § 4.5. Это звено имеет положительное самовыравнивание.
 .
.

В случае, соответствующем кривой 2, когда вращающий момент не зависит от скорости вращения, уравнение движения двигателя, записанное для угловой скорости, приобретает вид
J ddtΩ = kM x1 ,
где J — суммарный приведенный момент инерции на валу двигателя, kм — коэффициент пропорциональности между управляющим воздействием х1 и вращающим моментом. Здесь скорость двигателя связана с управляющим воздействием передаточной функцией, соответствующей интегрирующему звену
W ( p) = kJpM = kp
Это звено не имеет самовыравнивания. В случае, соответствующем кривой 3, дифференциальное уравнение движения будет
J ddtΩ = kM x1 + k1Ω,
где k1 — наклон механической характеристики в точке, линеаризация. Это уравнение приводится к следующему:
T ddtΩ −Ω = kx1
где производится
где Т = J/k1 — постоянная времени двигателя. Оно совпадает с выражением (4.56). Звено имеет отрицательное самовыравнивание.
Признаком отрицательного самовыравнивания является отрицательный знак перед самой выходной величиной в левой части дифференциального уравнения (см., например, формулу (4.56)) или появление отрицательного знака у свободного члена знаменателя передаточной функции (см., например, формулу (4.57)).
Существенной особенностью неустойчивых звеньев является наличие больших по сравнению с устойчивыми звеньями фазовых сдвигов. Так, для рассматриваемого апериодического звена с отрицательным самовыравниванием (неустойчивого) частотная передаточная функция на основании (4.57) будет равна
W ( jw) = k (4.59)
−1+Tjw
Модуль ее не отличается от модуля частотной передаточной функции устойчивого апериодического звена (табл. 4.3):
А(w) = |
k |
|
1 + w2T 2 |
||
|
Поэтому а. ч. х. и л. а. х. этих двух звеньев (устойчивого и неустойчивого) совпадают и по одной амплитудной характеристике нельзя определить. к какому звену она относится.
Фазовый сдвиг, соответствующий неустойчивому апериодическому звену,
ψ = −arctg wT−1 = −180 + arctgwT
имеет большие абсолютные значения по сравнению с фазовым сдвигом устойчивого апериодического звена первого порядка (табл. 4.3): ψ = −arctgwT . В связи с этим
неустойчивые звенья относятся к группе так называемых неминимально-фазовых звеньев, поскольку минимальные по абсолютному значению фазовые сдвиги при одинаковых амплитудных характеристиках будут у устойчивых звеньев. К неминимально-фазовым звеньям относятся также устойчивые звенья, имеющие в числителе передаточной функции (в правой части дифференциального уравнения) вещественные положительные

корни или комплексные корни с положительной вещественной частью. Например, звено с передаточной функцией
W ( p) = 1 −T1 p 1 +T2 w
относится к группе неминимально-фазовых звеньев. Действительно, по сравнению со звеном, имеющим передаточную функцию
W (з) = 1 +T1 p 1 +T2 w
оно будет иметь большие по абсолютной величине фазовые сдвиги, так как
− arctgwT1 − arctgwT2 > arctgwT1 − arctgwT2
при одинаковом виде амплитудной частотной характеристики.
Напомним, что к минимально-фазовым звеньям относятся такие, у которых корни числителя и знаменателя передаточной функции находятся в левой полуплоскости (см. § 4.3).
К неустойчивым звеньям, кроме рассмотренного выше звена, относятся также следующие звенья с соответствующими передаточными функциями:
квазиконсервативное звено — |
|
|
|
|
|
|
||||
W ( p) = |
k |
|
|
k |
|
|
||||
|
|
|
= |
|
|
|
|
|
(4.60) |
|
−1+T 2 p2 |
(−1+Tp)(1+Tp) |
|||||||||
квазиколебательное звено — |
|
k |
|
|
||||||
W ( p) = |
|
|
|
|
(4.61) |
|||||
T 2 p2 |
+ξTp −1 |
|||||||||
колебательное звено с отрицательным затуханием — |
||||||||||
W ( p) = |
|
|
|
|
k |
(4.62) |
||||
T 2 p2 |
−ξTp +1 |
|||||||||
квазиколебательное звено с отрицательным затуханием — |
||||||||||
W ( p) = |
|
|
|
|
k |
|
(4.63) |
|||
T 2 p2 |
−ξTp −1 |
|||||||||
неустойчивое интегрирующее звено- |
|
k |
|
|
||||||
|
W ( p) = |
|
|
|
(4.64) |
|
||||
|
p(−1+Tp) |
|
|
|||||||
и ряд других звеньев.
Наличие в автоматической системе неустойчивых звеньев вызывает некоторые особенности расчета, которые будут рассмотрены ниже (см. главу 6).
§ 4.9. Звенья с модулированным сигналом
До сих пор рассматривались звенья, в которых сигнал был немодулированным. В автоматических системах часто используются звенья (чувствительные элементы, усилители, серводвигатели и т. п.), у которых сигнал представляет собой переменное напряжение (или ток) некоторой частоты со0, называемой несущей. В этом случае закон изменения сигнала во времени характеризуется изменением амплитуды или действующего значения этого напряжения, т. е. огибающей. На рис. 4.27 для иллюстрации приведены формы немодулированного и модулированного сигналов. Изменению знака сигнала соответствует изменение фазы несущей частоты w0 на 180°.

При расчете автоматических систем с модулированным сигналом могут возникать две задачи:
1)нахождение такого звена, которое по своему воздействию на огибающую модулированного сигнала было бы эквивалентным какому-либо обычному звену, используемому ,в системах с немодулированным сигналом, например апериодическому первого порядка, дифференцирующему, интегрирующему ж т. п.;
2)определение воздействия звена с заданной передаточной функцией на огибающую модулированного сигнала, т. е. нахождение передаточной функции по огибающей.
Рассмотрим первую задачу. Ниже без строгих доказательств показывается путь, позволяющий сформулировать требования к частотной передаточной функции звена, чтобы его воздействие на огибающую сигнала было определенным и заранее заданным.
Для уяснения этого пути обратимся к какому-либо-простейшему звену «с немодулированным сигналом, например к апериодическому звену первого порядка. Для определенности в качестве такого звена возьмем .RC-цепь (рис. 4.13, д). Передаточная функция этого звена
W ( p) = 1+1Tp
где T=RC.
Представим себе, что динамические свойства рассматриваемого звена изучаются при помощи экспериментального снятия его амплитудной частотной характеристики. Для этой цели на вход RС-цепи нужно подавать напряжение от источника с переменной частотой, например от звукового генератора, и измерять отношение амплитуд выходного и входного напряжений. Характеристика снимается только для положительных частот, а затем дополняется симметричной ветвью в области отрицательных частот (рис. 4.28). По отношению к амплитудной частотной характеристике можно применить следующий формальный прием. Входное напряжение при снятии
частотной характеристики представляет собой гармоническую функцию с угловой частотой со и амплитудой U1mах:
u1 =U1max sin wt (4.65)
Используя понятие отрицательной частоты, можно представить эту функцию в виде алгебраической суммы сигнала, положительной частоты и сигнала отрицательной частоты:
u1 = U12max [sin wt −sin(−w)t] (4.66)