

Теория систем автоматического управления. В.А. Бесекерский, Е.П. Попов, 1975
.pdfРегулятор, в котором имеется усилительно-преобразовательное устройство, питаемое извне от добавочного источника энергии (рис. 1.5), называется регулятором непрямого действия. В простейших регуляторах, как увидим ниже, усилительнопреобразовательного устройства и привода может и не быть вовсе, т. е. измерительное устройство может непосредственно (без дополнительного источника энергии) воздействовать па регулирующий орган (рис. 1.7). Такой регулятор называется регулятором прямого действия. Питание регулятора прямого действия энергией идет не извне, а целиком за счет энергии самого регулируемого объекта, подаваемой через измерительное устройство.
Но существуют, наоборот, и более сложные регуляторы. Так, кроме одиночных систем регулирования, о которых здесь идет речь, состоящих из одного регулируемого объекта и одного регулятора, существуют так называемые связанные или многомерные системы регулирования.
Многомерными системами регулирования называются такие, в которых имеется несколько регулируемых величин или в единый автоматически работающий комплекс связаны несколько регуляторов на одном объекте или несколько регуляторов и несколько объектов с перекрестными -связями между ними.
Те же общие принципы используются в разного рода системах автоматического управления. Управление — более общий термин, чем регулирование, стабилизация, слежение, ориентация, наведение. Система автоматического управления может решать любую из этих задач, но может решать также и совокупность такого рода задач и иметь различные дополнительные функции.
Обратимся, например, к системе автоматического управления полетом самолета (система самолет — автопилот). Автопилот имеет три канала управления: управление движением в вертикальной плоскости (по тангажу), управление движением в горизонтальной плоскости (по курсу) и управление поворотом вокруг собственной оси (по крену). Для примера на рис. 1.8 изображен один канал автопилота — курсовой. Здесь корпус самолета 1 является объектом управления, гироскоп 2 с потенциометрической схемой служит измерительным устройством. Далее идут усилитель 5, приводной двигатель 4 с редуктором 5 (рулевая машинка) и, в качестве регулирующего органа, руль 6.
Гироскоп сохраняет неизменное направление в пространстве. Поэтому при отклонении самолета на угол ψ от заданного курса движок, связанный с гироскопом, смещается с
нулевой точки. В результате на усилитель подается напряжение, пропорциональное углу отклоненияψ . Оно приводит в движение исполнительное устройство 3—5. При этом
вследствие отклонения руля на угол δ самолет возвратится в требуемое положение (позднее будет показано, что одного сигнала гироскопа для управления самолетом недостаточно).
Аналогично устроены и два других канала автопилота. Очевидно, что если с помощью автопилота надо поддерживать неизменный курс или надо разворачивать самолет по заданной программе, то данная система управления будет работать по общей схеме системы автоматического регулирования — либо в режиме стабилизации постоянной величины, либо в режиме программного регулирования. Если же самолет надо наводить на какую-либо цель, причем заданное направление (рис. 1.8) вместо гироскопа (или в дополнение к нему) определяется каким-нибудь визирующим цель устройством (оптическим или радиолокационным), то данная система управления будет работать как следящая система. Аналогично обстоит дело и по каналу тангажа. В канале крена обычно имеет место автоматическая стабилизация нулевого угла крена. При этом каждый из трех каналов управления действует на свой руль (руль направления, руль высоты, элероны), т. е. имеется три отдельных регулятора на одном объекте. Однако между ними часто вводятся еще перекрестные связи.

Рис 1.8.
Например, для улучшения поворота самолета по курсу полезно самолет несколько накренить. Поэтому полезно сигнал отклонения курса подавать не только на руль направления, но также и в канал крена (так называемый координированный разворот). Кроме того, данная система автоматического управления полетом самолета может выполнять и некоторые другие функции, связанные со стабилизацией скорости и линии пути и с анализом обстановки на местности и в воздухе на основе обработки информации от разных измерителей на борту, от команд с земли и т. п.
Большое значение в технике управления имеют системы комбинированного действия с регулированием по возмущению (пунктирные линии: на рис. 1.5). Все большую роль начинают играть адаптивные системы, т.е. самонастраивающиеся, самооптимизирующиеся и самоорганизующиеся системы, а также системы с переменной структурой, о которых будет идти речь. во второй главе книги.
Для систем автоматического регулирования и для следящих систем (равно как и для всех замкнутых автоматических систем вообще) существуют практически единые методы динамических расчетов.
Большое различие в теорию систем вносят не только функциональные признаки, но и характер внутренних процессов: непрерывный — дискретный (импульсный), линейный
— нелинейный и т. п. Этим объясняется и деление данной книги на соответствующие крупные разделы.
§ 1.2. Классификация автоматических систем по характеру внутренних динамических процессов
Каждая автоматическая система состоит из целого ряда блоков или звеньев, различно соединенных между собой (см. рис. 1.3—1.5). Каждое отдельно взятоезвено имеет входи выход (рис. 1.9, а) в соответствии со стрелками на рис. 1.3—1.5, обозначающими воздействие или передачу информации с одного звена на другое. В общем случае звено может иметь несколько входов и выходов, но сейчас это несущественно. Входная величина х1 и выходная х2 могут иметь любую физическую природу (ток, напряжение, перемещение, температура, освещенность и т. п.).
Рис. 1.9.
В процессе работы автоматической системы величины х1 и х2 изменяются во времени. Динамика процесса преобразования сигнала в данном звене описывается некоторым уравнением (или экспериментально снятой характеристикой), связывающим выходную
переменную х2 с входной переменной х1. Совокупность уравнений и характеристик всех звеньев описывает динамику процессов управления или регулирования во всей системе в целом. Существуют различные характеристики звеньев: статические, переходные, частотные и др. Далее все они будут изучены.
Основными признаками деления автоматических систем на большие классы по характеру внутренних динамических процессов являются следующие:
1)непрерывность или дискретность (прерывистость) динамических процессов во времени,
2)линейность или нелинейность уравнений, описывающих динамику процессов регулирования.
По первому признаку автоматические системы делятся на системы непрерывного действия, системыдискретногодействия(импульсные ицифровые) и системы релейного действия. По второму признаку каждый из указанных классов (кроме релейного делится на системы линейные и нелинейные. Системы же релейного действия относятся целиком к категории нелинейных систем.
Дадим определение каждого класса автоматических систем, а затем рассмотрим их примеры.
Системой непрерывного действия называется такая система, в каждом из звеньев которой непрерывному изменению входной величины во времени соответствует непрерывное изменение выходной величины. При этом закон изменения выходной величины во времени может быть произвольным, в зависимости от формы изменения входной величины и от вида уравнения динамики (или характеристики) звена.
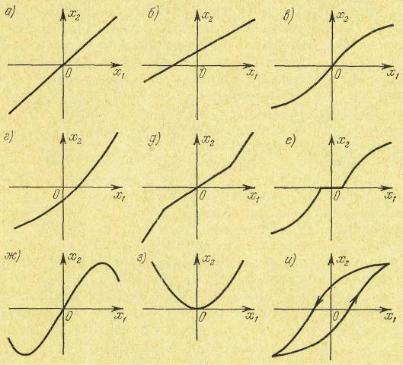
Чтобы автоматическая система в целом была непрерывной, необходимо прежде всего, чтобы статические характеристики всех звеньев системы были непрерывными. Примеры непрерывных статических характеристик показаны на рис. 1.10.
Системой дискретного действия называется такая система, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина изменяется не непрерывно, а имеет вид отдельных импульсов, появляющихся через некоторые промежутки времени (рис. 1.11). Звено, преобразующее непрерывный входной сигнал в последовательность импуль сов, называется импульсным. Если последующее звено системы тоже дискретное, то для него не только выходная, но и входная величина будет дискретной (импульсной). К дискретным автоматическим системам относятся системы
Рис. 1.10.
импульсного регулирования (т. е системы с импульсным звеном), а также «системы с цифровыми вычислительными устройствами. Эти последние дают результат вычисления на выходе дискретно, через определенные промежутки времени, в виде чисел для отдельных дискретных числовых значений входной величины.
Рис. 1.11.
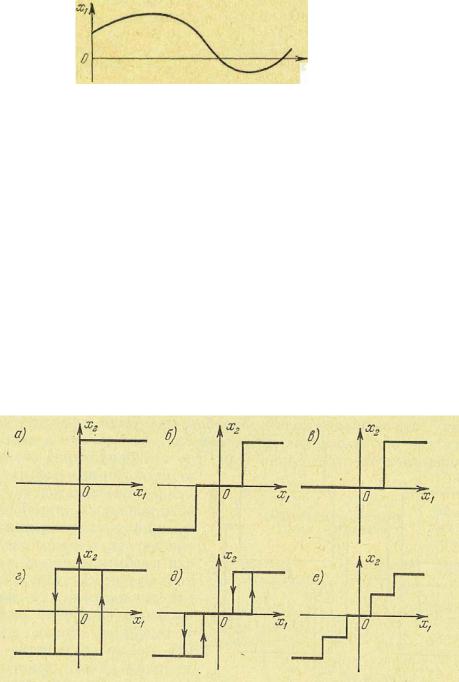
Системой релейного действия, называется такая система, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина в некоторых точках процесса, зависящих от значения входной величины, изменяется скачком. Такое звено называется релейным звеном. Статическая характеристика релейного звена имеет точки разрыва, как показано в разных вариантах на рис. 1.12.
Обратимся теперь ко второму признаку классификации автоматических систем.
Линейной системой называется такая система, динамика всех звеньев которой вполне описывается линейными уравнениями (алгебраическими и дифференциальными или разностными). Для этого необходимо прежде всего, чтобы статические характеристики всех звеньев системы были линейными, т. е. имели вид прямой линии (рис. 1.10, а и б).
Если динамика всех звеньев системы описывается обыкновенными линейными дифференциальными (и линейными алгебраическими) уравнениями с постоянными коэффициентами, то систему называют обыкновенной линейной системой.
Если в уравнении динамики какого-либо звена линейной системы имеется хотя бы один или несколько переменных во времени коэффициентов, то получается линейная система с переменными параметрами. Если какое-либо звено описывается линейным уравнением в частныхпроизводных (например, имеют место волновые процессы в трубопроводе или в
Рис. 1.12.
электрической линии), то система будет линейной системой с распределенными параметрами. В
отличие от этого обыкновенная линейная система является системой с сосредоточенными параметрами. Если динамика какого-либо звена системы описывается линейным уравнением с запаздывающим аргументом (т. е. звено обладает чисто временным запаздыванием или временной задержкой т передачи сигнала (рис. 1.13)), то система называется линейной системой с запаздыванием. Динамика линейных импульсных систем описывается линейными разностными уравнениями. Все эти системы объединяются общим названием особые линейные системы, вотличиеотобыкновеннойлинейнойсистемы, указаннойвыше.
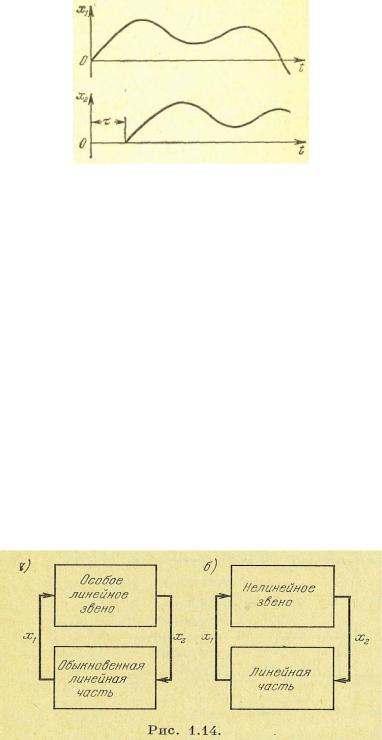
Рис. 1.13.
Заметим, что хотя классификация систем и производится по уравнениям динамики звеньев, в дальнейшем будет применяться исследование динамических процессов не только с помощью аппарата уравнений, но также и с помощью эквивалентного ему частотного аппарата,
вбольшинстве случаев более удобного для практических приложений. Нелинейной системой называется такая система, в которой хотя бы в одном звене нарушается линейность статической характеристики или же имеет место любое другое нарушение линейности уравнений динамики звена (произведение переменных или их производных, корень, квадрат или более высокая степень переменной, любая другая нелинейная связь переменных и их производных). Следовательно, к нелинейным системам относятся, в частности, все системы, в звеньях которых имеются статические характеристики любого из многих видов, показанных на рис. 1.10, в — и. К ним же относятся и все системырелейногодействия(рис. 1.12).
Нелинейными могут быть, разумеется, также и системы с переменными параметрами, с распределенными параметрами, с запаздыванием, импульсные и цифровые системы, если в них где-либо нарушается линейность уравнений динамики (в цифровых системах это связано,
вчастности, с квантованием сигнала по уровню).
При исследовании, расчете и синтезе автоматических систем нужно иметь в виду, что наиболее полно разработаны теория и различные прикладные методы для обыкновенных линейных систем. Поэтому в интересах простоты расчета всегда желательно (там, где это допустимо) сводить задачу к такой форме, чтобы максимально использовать методы
Рис 1.14
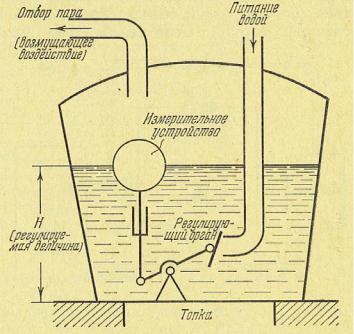
исследования обыкновенных линейных систем. Обычно уравнения динамики всех звеньев системы стараются привести к обыкновенным линейным, и только для некоторых звеньев, где это недопустимо или где специально вводится особое линейное или нелинейное звено, учитываются эти особые их свойства. Тогда при наличии одного такого звена система при расчете разбивается на два блока (рис 1.14), в одном из которых объединяется весь комплекс обыкновенных линейных звеньев. Однако это вовсе не значит, что при проектировании новых автоматических систем нужно стремиться к обыкновенным линейным системам. Наоборот, уже из приведенных выше определений совершенно очевидно, что обыкновенные линейные системы обладают ограниченными возможностями. Введение особых линейных и нелинейных звеньев может придать системе лучшие качества. Особенно богатыми возможностями обладают системы со специально вводимыми нелинейностями и дискретные системы, в том числе с
цифровыми вычислительными устройствами, а также адаптивные, т. е. самонастраивающиеся, экстремальные, самоорганизующиеся системы.
§ 1.3. Примеры непрерывных автоматических систем
Один из первых в истории техники автоматических регуляторов был изобретен И. И. Ползуновым в 1765 г. Это был автоматический регулятор уровня воды в котле его паровой машины (рис. 1.15). Здесь полностью осуществлен общий принцип действия любого автоматического регулятора прямого действия (рис. 1.7). Измерительное устройство (поплавок), измеряющее регулируемую величину (высоту уровня воды в котле), непосредственно перемещает регулирующий орган (клапан питания котла водой). Котел является регулируемым объектом.
Изменение величины отбора пара из котла в паровую машину является основным возмущающим воздействием на регулируемый объект. Если отбор пара увеличится, испарение воды ускорится, уровень воды Н (регулируемая величина) начнет уменьшаться. Тогда поплавок, опускаясь, будет шире открывать регулирующий клапан, усилится приток питающей воды, и уровень ее будет автоматически восстанавливаться. Кроме изменения отбора пара, возмущающее воздействие на объект будет проявляться также и в изменении условий теплового режима работы котла (интенсивность топки, температура питающей воды и окружающего пространства). Регулятор во всех случаях будет действовать так, чтобы ликвидировать нежелательное отклонение уровня воды, по каким бы причинам оно ни возникало.
Следующим в истории техники автоматическим регулятором, получившим широкое распространение, был центробежный регулятор скорости вращения вала паровой машины, изобретенный Уаттом в 1784 г. (рис. 1.16). Этот регулятор имеет другую конструкцию и другую природу регулируемой величины (угловая скоростьω ),но совершенно тот же общий принцип действия регулятора прямого действия (рис. 1.7). Измерительное устройство регулятора (центробежный механизм) реагирует на изменение регулируемой величиныω . Так, если угловая скорость вала ω увеличивается, шары центробежного механизма расходятся, муфта поднимается и перемещает непосредственно регулирующий орган (например, заслонку в трубе питания машины паром). Это изменяет приток энергии в машину, чем автоматически уничтожается нежелательное отклонение угловой скоростиω .
Рис. 1.15.
Основным возмущающим воздействием на регулируемый объект здесь является изменение
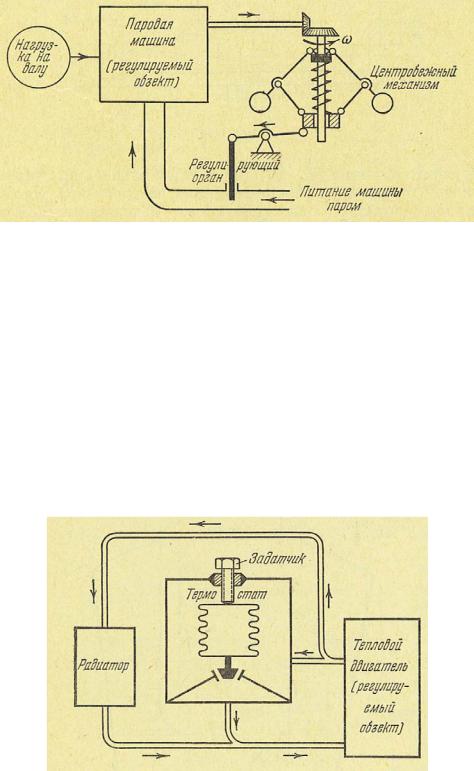
нагрузки на валу паровой машины. Кроме этого может иметь место и другое возмущающее воздействие в виде нарушения нормальных параметров пара в трубе питания машины. Регулятор гасит влияние любого воздействия (в определенных пределах), стремясь все время ликвидировать отклонение, по какой бы причине оно ни возникало. После изобретения этих первых автоматических регуляторов, чисто механических, в течение XIX в. в связи с потребностями промышленности,
Рис. 1.16.
транспорта и энергетики появляется много различных конструкций регуляторов, сначала механических, а затем и электрических. Дальнейшее развитие автоматики, особенно в XX в., идет все больше и больше по пути электрификации систем автоматического регулирования, в том числе и для механических, тепловых и химических объектов.
Для иллюстрации общности принципов построения систем автоматического регулирования, относящихся к самым разнообразным техническим объектам, приведем еще несколько конкретных примеров. На рис. 1.17 изображена схема автоматического регулирования температуры воды или масла в тепловом двигателе. Нагретая вода из двигателя (регулируемый объект) поступает в термостат (измерительное устройство регулятора). Если температура воды повышается, то под действием увеличения давления паров специальной легко испаряющейся жидкости, находящейся в сильфоне термостата, прикрывается клапан прямого возврата воды в двигатель. Вследствие этого большее количество воды пойдет в обход - через радиатор, где она охлаждается. Таким образом автоматически поддерживается постоянная температура воды в системе охлаждения теплового двигателя (в частности, автомобильного). Это — регулятор прямого действия, работающий по той же общей схеме (рис. 1.7).
Рис 1.17
На рис. 1.18 показана схема автоматического регулирования угловой скорости ω вращения вала электродвигателя (Дв). Последний является регулируемым объектом. Данная система работает согласно общей схеме автоматического регулятора непрямого действия (рис. 1.5). Здесь изменение нагрузки на валу электродвигателя является возмущающим воздействием.

Измерительным устройством служит тахогенератор Т г
Рис. 1.18.
(электрический тахометр), вырабатывающий напряжение U1, пропорциональное регулируемой величине — угловой скорости ω . На потенциометре задатчика устанавливается напряжение U0 , соответствующее требуемому значению угловой скоростиω . РассогласованиеU 2 =U 0 −U1 подается на электромашинный усилитель (ЭМУ). Может быть
введен также предварительный электронный усилитель (показан пунктиром). Электромашинный усилитель в соответствии с поступающим в его обмотку возбуждения сигналом U3 изменяет ток в цепи якоря электродвигателя. Это является регулирующим воздействием, которое ликвидирует создавшееся отклонение угловой скорости ω .
Для иллюстрации комбинированной системы с регулированием по возмущению возьмем ту же систему регулирования скорости электродвигателя (рис. 1.18) и, сохранив целиком всю прежнюю цепь регулирования по отклонению регулируемой величины, добавим к ней новую цепь регулирования по возмущающему воздействию (рис. 1.19). Эта новая дополнительная цепь состоит из моментной муфты, которая измеряет возмущающее воздействие в виде отклонения момента нагрузки от номинального значения, и из специального
Рис. 1.19.
корректирующего устройства.
По принципу обычной системы регулирования работает также система автоматического управления торпеды по курсу (рис. 1.20). Гироскоп 2, сохраняя неизменное направление, измеряет отклонение торпеды ψ от заданного курса. С гироскопом жестко связана заслонка,
открывающая доступ воздуха под давлением в пневматическую рулевую машинку 3 (исполнительное устройство), которая поворачивает руль 4, возвращая тем самым торпеду на заданный курс.
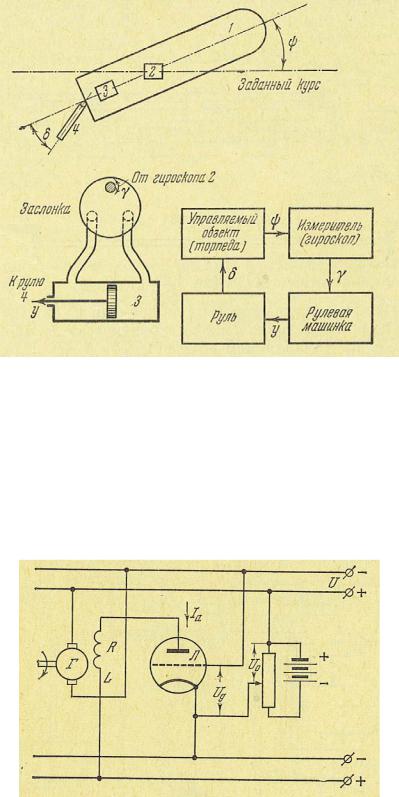
Рис. 1.20.
Рассмотрим еще упрощенную схему автоматического регулирования напряжения генератора постоянного тока при помощи электронного регулятора (рис. 1.21). В данном случае регулируемым объектом является генератор постоянного тока, регулируемой величиной — напряжение U на клеммах генератора, внешним возмущающим воздействием — нагрузка в сети, на которую работает генератор. Измерительным устройством регулятора служит сетка лампы, а исполнительным устройством — анодная цепь лампы. При нежелательном изменении напряжения U появляется напряжение Ug на сетке и пропорциональное ему изменение тока Iа в анодной цепи, а следовательно, и в обмотке возбуждения генератора, которая включена в анодную цепь. Этим изменением тока возбуждения ликвидируется нежелательное отклонение регулируемого напряжения.
рис 1.21.
Рассмотренныепримерыотносятся к одиночным системам автоматического регулирования. Примерами связанных систем регулирования являются системы регулирования напряжения и частоты переменного тока, регулирования скорости и температуры в реактивных двигателях, регулирования различных величин в энергетической системе, состоящей из нескольких параллельно работающих объектов. Связанная система управления получается и при рассмотрении работы всего автопилота на самолете в целом.
Пример электромеханической следящей системы показан на рис. 1.22. Принцип ее действия следующий. На входе вращением рукоятки задается произвольный закондляуглаповорота
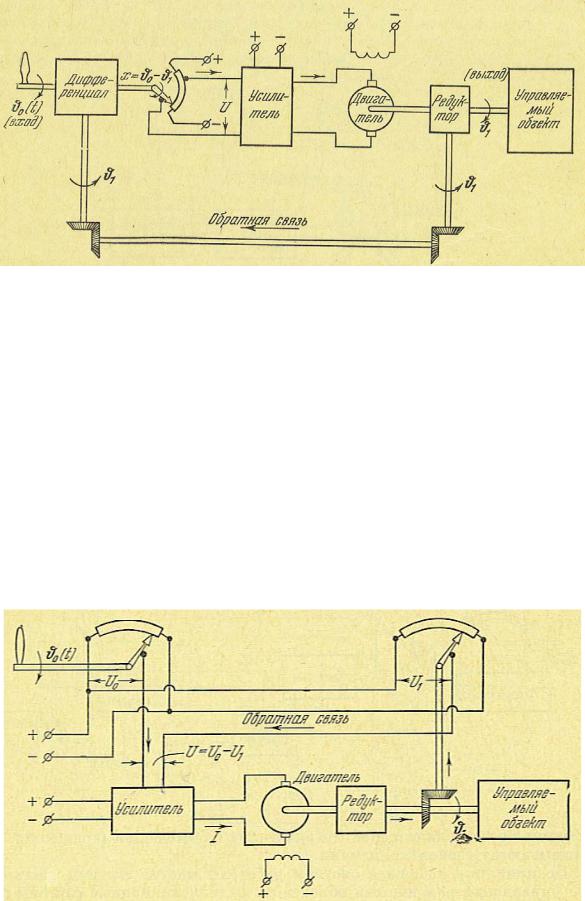
Рис. 1.22.
во времени υ0 (t) Тот же самый закон угла поворота во времени должен быть автоматически воспроизведен на выходе системы, т. е. на управляемом объекте: υ1 =υ0 (t) . Для этой цели угол поворота на выходе υ1 передается при помощи вала обратной связи на вход системы, где он вычитается из задаваемого угла υ0 . Это вычитание осуществляется при помощи механического дифференциала. Если угол на выходе υ1 не равен углу на входе до, то третий валик дифференциала повернется на разность этих углов x =υ0 −υ1 (рассогласование).
Пропорциональное ей напряжение U подается через усилитель на приводной двигатель, который вращает выходной вал системы. Если жеυ1 =υ0 , то двигатель обесточен, и
вращения не будет. Следовательно, система все время работает на уничтожение рассогласования x =υ0 −υ1 решая, таким образом, задачу воспроизведения на выходе υ1
произвольно задаваемой на входе величины υ0 (t) . Такая система позволяет при
незначительной мощности на входе управлять любыми мощными или тяжелыми объектами (орудийными башнями и т. п.). Очень часто следящие системы применяются для дистанционного управления самыми разнообразными объектами, а также для телеуправления.
Рис1.23
Дистанционное управление трудно осуществить при механической обратной связи, показанной на рис. 1.22. В этом случае применяется реостатная обратная связь на постоянном токе (рис. 1.23) или сельсинная обратная связь на переменном токе (рис. 1.24), т.