

Теория систем автоматического управления. В.А. Бесекерский, Е.П. Попов, 1975
.pdfпроизводиться на основании каких-либо других требований применительно к каждой конкретной технической системе.
Итак, в системах автоматического регулирования и управления прежде всего задается тем или иным способом программа регулирования (в описанном выше широком понимании этого термина). Стабилизация неизменного значения регулируемой величины будет простейшим частным случаем программы регулирования yпр = const .
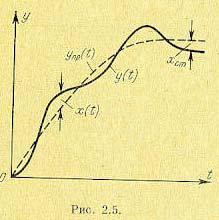
Программа регулирования yпр (t) будет осуществляться регулятором или системой
управления неизбежно с некоторыми ошибками, как показано на рис. 2.5. Ошибка системы (рассогласование)
x(t) = yпр (t) − y(t)
обусловлена как погрешностями реальной аппаратуры, так и самим принципом построения регулятора. При этом меняющаяся в процессе регулирования так называемая динамическая ошибка x(t) может перейти в некоторое постоянное отклонение
регулируемой величины в установившемся режиме при yпр = const , называемое статической ошибкойxст .
 .
.
Понятие «динамическая ошибка» является очень широким. В него включаются все виды ошибок систем автоматического регулирования, которые имеют место в динамических процессах, т. е. при меняющихся внешних воздействиях (возмущающих или управляющих) и во всех случаях переходных процессов. Различные виды этих ошибок и способы их уменьшения будут предметом изучения во всех дальнейших главах книги.
Величины динамических и статических ошибок регулирования в очень сильной степени зависят от структуры регулятора, определяющей так называемый закон регулирования. Этот вопрос станет ясным в дальнейшем, а здесь можно дать лишь некоторое общее понятие о законах регулирования.
§ 2.2. Линейные и нелинейные законы регулирования
Автоматический регулятор в системе регулирования состоит, как уже известно, из трех основных частей: измерительной, усилительно-преобразовательной и исполнительной. В усилительно-преобразовательной части имеются корректирующие устройства, в которых, помимо сигнала отклонения x регулируемой величины, образуется сигнал по первой производной dx / dt (может быть также и по второй
производной и по интегралу от отклонения∫x dt , вводятся дополнительные обратные
связи и т. п. Все это служит для улучшения устойчивости, точности и качества процесса регулирования и будет подробно изучено в дальнейшем.
Закон, по которому формируется регулирующее воздействие и на объект
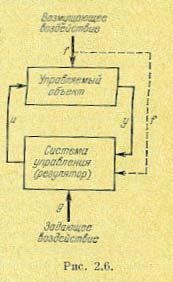
(рис. 2.6) из первичных сигналов x, dx / dt , называется законом регулирования.
Иначе говоря, закон регулирования есть алгоритм формирования целесообразного сигнала управления u на основании первичной информации x, dx / dt и т. п. В
комбинированных системах регулирования, кроме того, добавляется первичная информация по возмущению f (t) , а иногда и по задающему воздействиюg(t) .
Математически закон регулирования определяется уравнением автоматического регулятора. Различают линейные и нелинейные законы регулирования.
Кроме упоминавшихся выше корректирующих устройств, регулятор (система управления) может содержать различные фильтры (линейные или нелинейные) для борьбы с различного рода помехами. В усилительно-преобразовательном устройстве часто производятся также преобразования одних физических величин в другие (одного рода тока в другой, электрических величин в механические и т. п.) для удобства формирования закона регулирования в маломощных цепях регулятора, а также в интересах работы достаточно мощных исполнительных устройств.
Линейные законы регулирования определяются линейным уравнением регулятора, например, вида
2 d |
2 |
t |
|
du |
|
dx |
|
d |
2 |
x |
|
|
|
df |
|
d |
2 |
f |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
T2 |
|
|
|
+T1 |
|
+ u = k x + k1 |
|
+ k2 |
|
|
|
+ k−1 ∫xdt |
+ k f f |
+ k f 1 |
|
+ k f 2 |
|
|
|
|
|
dt |
2 |
dt |
dt |
dt |
2 |
dt |
dt |
2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
(последняя скобка относится только к комбинированным системам). Для линейных законов регулирования детально разработаны многочисленные прикладные методы исследования (анализа и синтеза), различные расчетные и экспериментальные приемы определения устойчивости, точности и качества процесса регулирования, а также схемы конкретных технических устройств формирования линейных законов регулирования. Все это касается и линейных систем с переменными параметрами и импульсных и цифровых (хотя они пока еще менее полно изучены).
Что же касается нелинейных законов регулирования, то (за исключением релейного), они изучены мало. Очевидно, однако, что использование нелинейных законов регулирования, определяемых разнообразными нелинейными уравнениями регулятора
|
|
du |
|
|
|
dx |
|
|
F |
u, |
|
, ... |
= F |
x, |
|
, ...;u, f , g , |
|
dt |
dt |
|||||||
1 |
|
|
2 |
|
|
значительно расширяет возможности целесообразного изменения качества процессов регулирования и точности. Это ясно из общих принципиальных соображений, так как область нелинейных уравнений значительно богаче и разнообразнее, чем линейных.
Несмотря на то, что общей теории нелинейных законов регулирования нет, исследования и опыт применения отдельных частных видов этих законов говорят об их

большой практической эффективности. Отсюда следует актуальность их теоретического изучения.
Введем следующую классификацию нелинейных законов регулирования:
1)функциональные нелинейные законы регулирования,
2)логические нелинейные законы регулирования,
3)оптимизирующие нелинейные законы регулирования,
4)параметрические нелинейные законы регулирования.
Важным отличием нелинейных законов от линейных является то, что они придают системе регулирования принципиально новые свойства. Если при линейном законе всегда вырабатывается сигнал, пропорциональный входной переменной или ее производной и т. д., то при нелинейном законе может существенно изменяться сам характер действия системы управления на объект в зависимости от величины входного воздействия. Другими словами, если для линейных систем изменение размера отклонения — это изменение только масштаба, но не формы процессов, то в нелинейной системе при этом может существенно изменяться и форма процессов, вплоть до принципиальных качественных изменений картины процессов. Эти особые свойства нелинейных законов можно выгодно использовать в технике автоматического управления и регулирования.
Рассмотрим отдельно каждый из указанных четырех классов нелинейных законов регулирования.
Функциональные нелинейные законы регулирования. Функциональными будем называть такие нелинейные законы регулирования, при которых регулирующее воздействие на объект выражается в виде нелинейной функции от отклонения регулируемой величины, представляющей собой входную информацию для системы регулирования.
Данный класс может содержать в себе как статические, так и динамические нелинейности. Примеры статических нелинейностей в законе регулирования:
u = k(1 + b x )x,
.
u = k(signx) 1 + b x
В отличие от линейного закона, здесь в первом случае будет более энергичное действие регулятора при больших отклонениях x и большой запас устойчивости установившегося режима. Во втором случае будет менее энергичное, но более плавное действие регулятора вначале и повышенная точность в установившемся режиме, хотя и с меньшим запасом устойчивости. Однако такого рода рекомендации, как увидим в дальнейшем, справедливы для большинства систем, но все же не для всех. Поэтому они требуют специального обследования для каждого объекта регулирования.
Нелинейный закон регулирования за счет дополнительных нелинейных обратных связей может включать в себя также нелинейности от выходной величины и:
u = kx + F (u) ,
что расширяет возможности целесообразного изменения качества процесса регулирования.
Примеры динамических нелинейностей в законе регулирования: u = k(1 ±b x )x,
u = k(1 ±b x )x, u = k(1 ±b x )x,
где вместо двойного знака подразумевается какой-либо один из них.
Подобные динамические члены нелинейного закона регулирования различно влияют на демпфирующие свойства системы регулирования в переходных процессах в зависимости от размеров и скорости отклонения. Они же могут существенно улучшать динамическую точность (т. е. уменьшать динамические ошибки) системы в различных

режимах вынужденного движения, воспроизведения различных форм задаваемых входных сигналов, а также при случайных воздействиях.
Отметим, что функциональные нелинейные законы регулирования могут быть связаны не только с изменением параметров в зависимости от раз-, меров входных воздействий, но и с изменением структуры. Например, при увеличении отклонения регулируемой величины сверх определенного порога | х | = с в системе может происходить переключение с одного линейного корректирующего устройства на другое.
 .
.
Логические нелинейные законы регулирования. Нелинейные законы регулирования могут иметь иные формы, которые реализуются с помощью не функциональных, а более или менее сложных логических устройств. Будем называть их логическими нелинейными законами регулирования.
Например, в системе на рис. 2.7 логический нелинейный закон регулирования может быть применен для экономии управляющих воздействий со стороны регулятора на объект (а также экономии расхода энергии на нужды регулирования). Построение простейшего логического нелинейного закона регулирования лучше всего пояснить на плоскости двух
входных величин u1 , u2 |
(рис. 2.8). Последние с точностью до характеристик |
|||
неидеальности измерителей |
соответствуют отклонению х и скорости отклонения |
dx |
|
|
dt |
||||
|
|
|||
регулируемой величины (рис. 2.7.).
Заметим, что если знак скорости dxdt совладает со знаком отклонения х, то величина отклонения x по модулю возрастает. В этом случае требуется энергичное действие
регулятора для его ликвидации. Если же знак скорости |
dx |
противоположен знаку |
|
dt |
|||
|
|
отклонения х, то величина x уменьшается. В этом случае можно вовсе не подавать на объект управляющего воздействия, если скорость dxdt достаточна для необходимой быстроты ликвидации отклонения, или же подавать воздействие при очень малой
скорости dxdt . Эти рассуждения позволяют считать целесообразным, например,
применение следующего логического закона регулирования.
Управляющее воздействие ( u3 = +1илиu3 = −1) включается только тогда, когда
|
u |
|
> u |
(см. рис. 2.8), т. е., когда отклонение достаточно велико и u |
2 |
имеет знак, |
|
|
|||||
|
1 |
|
2 |
|
|
одинаковый со знаком u1 или противоположный, но при малом u2 < u2 Во всех остальных случаях управление выключено (u3 = 0), так как при противоположных знаках u2 и u1 и достаточной величине u2 > u2 система сама, без управления возвращается к требуемому
положению х = 0 (если при этом гарантирована противоположность их знаков dxdt и х).
Более подробно эта система будет рассмотрена в разделе IV.
Логические нелинейные законы регулирования могут быть связаны также с изменением структуры системы регулирования. Например, при помощи логического устройства можно включать и выключать сигналы управления по первой и второй производным и по интегралу, в зависимости от сочетания значений отклонения
регулируемой величины х и скорости отклонения ee dxdt . Если правильно сформировать
логику этих переключении, то можно существенно повысить качество работы системы регулирования.
Вместо комбинирования указанных линейных членов закона регулирования могут вводиться также и функциональные нелинейные члены; включение и выключение сигналов, соответствующих этим членам, производится при помощи логического устройства. Тогда получится комбинация функциональных и логических нелинейных законов регулирования.
Оптимизирующие нелинейные законы регулирования. В настоящее время интенсивно развивается теория оптимальных процессов регулирования. При этом на основе классических вариационных методов, или на основе так называемого принципа максимума, или методом динамического программирования определяется закон регулирования таким образом, чтобы система имела максимум быстродействия, или минимум ошибки, или же минимум какой-нибудь другой величины (в форме функционала) с учетом ограничений, накладываемых в реальной системе на координаты, скорости, силы и т. п.
Как правило, при этом/приходят к нелинейным законам регулирования, хотя, вообще говоря, можно оптимизировать и коэффициенты линейного закона, задав его форму. Часто оптимальный нелинейный закон регулирования состоит в переключении управляющего воздействия (при определенных состояниях системы) с одного максимально возможного значения на другое (противоположного знака). Моменты переключения в целом определяются сложными комбинациями значений нескольких переменных и их производных.
Параметрические нелинейные законы регулирования. В предыдущих типах законов регулирования вводились отклонения регулируемой величины от некоторых заданных ее программных значений. При параметрической программе управления закон регулирования может выражаться в виде нелинейной функции текущих координат, в которых задается параметрическая программа. Например, для рассмотренного в § 2.1 закона наведения как параметрической программы управления закон регулирования имеет вид (2.6), причем для его формирования берут исходную информацию от измерителей расстояния ρ и скорости сближения ρ , т. е. тех величин, в которых выражена
параметрическая программа.
Нелинейные законы регулирования обладают богатыми возможностями во всех случаях, когда требуемый эффект может быть достигнут изменением свойств системы с
изменением величин ошибок. Важным классом нелинейных систем являются системы с переменной структурой. Большими возможностями обладают так называемые адаптивные, т. е. самонастраивающиеся и самоорганизующиеся, системы, описанию которых посвящаются нижеследующие параграфы.
Большие дополнительные возможности улучшения процессов регулирования дает нелинейное управление работой объекта путем изменения структуры регулятора в зависимости от размеров и знаков входных величин, поступающих в регулятор от измерительного устройства.
При этом могут использоваться комбинации линейных законов регулирования. Например, если известно, что при одном линейном законе регулирования получается быстрое начальное изменение регулируемой величины, но с большими последующими колебаниями (кривая 1, рис. 2.9), а при другом линейном законе регулирования — медленное изменение, но плавный подход к новому установившемуся режиму (кривая 2, рис. 2.9), то можно, включив сначала первый закон, переключить затем систему на второй закон в некоторой точке А, когда отклонение х достигнет определенного значения xA. В результате процесс регулирования изобразится кривой 3 (рис. 2.9), объединяющей оба качества — быстроту и плавность процесса.
Для осуществления этого необходимо иметь в системе переключающее устройство, срабатывающее в данном случае при х = xA (рис. 2.10).
 .
.
Если в такой системе с переменной структурой все звенья линейные, то за счет указанного переключения, происходящего автоматически в процессе регулирования, система становится нелинейной. Это можно сравнить с тем, как получается нелинейная статическая характеристика из отрезков прямых линий (см., например, рис. 1.10, д). •Но здесь имеет место нелинейная динамическая характеристика, составляемая из последовательности разных линейных дифференциальных уравнений, соответствующих первому и второму законам регулирования.
 .
.
В общем случае срабатывание переключающего устройства в системе ^ переменной структурой может происходить от нескольких входных величин. При этом кроме основной нелинейности, возникающей за счет переключения структуры, дополнительно могут иметься какие-либо нелинейные •свойства в отдельных других звеньях регулятора или объекта.
§ 2.4. Системы с самонастройкой программы (экстремальные системы)
Раньше речь шла все время о таких системах регулирования, в которых требуемое значение регулируемой величины было заранее задано либо .постоянным, либо изменяющимся по определенной программе во времени; в следящих системах оно задавалось извне во время работы системы.
В отличие от них экстремальными системами регулирования называются такие, которые сами ищут наивыгоднейшую программу, т. е. то значение регулируемой величины, которое нужно в данный момент выдерживать, чтобы режим работы регулируемого объекта был наивыгоднейшим. При этом имеется в виду уже не выбор закона регулирования, а автоматический поиск требуемого наивыгоднейшего значения регулируемой величины при изменяющихся внешних условиях работы объекта. Таким образом, на систему, называемую экстремальной, сверх обычной задачи автоматического выдерживания требуемого значения регулируемой величины, накладывается дополнительная задача автоматического поиска наивыгоднейшего значения требуемой регулируемой величины, т. е. самой программы регулирования.
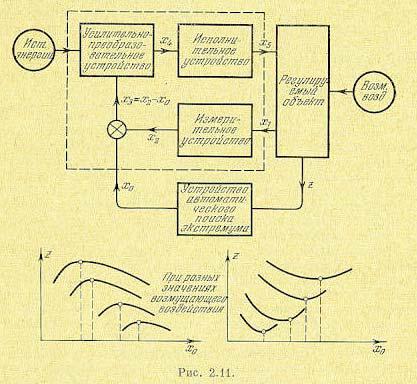
Следовательно, в таких системах вместо программного устройства или задатчика ставится устройство автоматического поиска (рис. 2.11), которое производит анализ какой-нибудь характеристики объекта z и подает в регулятор требуемое значение регулируемой величины x0 так, чтобы данная характеристика z (х0) получила экстремальное (максимальное или минимальное) значение.
Например, характеристика z(x0) может быть коэффициентом полезного действия регулируемого объекта (например, двигателя) или величиной расхода горючего в объекте. Тогда устройство автоматического поиска будет выдавать такое требуемое значение регулируемой величины x0 (например, требуемой скорости вращения двигателя), которое дает, соответственно, максимум коэффициента полезного действия или минимум расхода горючего.
При этом как сама величина экстремума z, так и соответствующее ему значение x0 могут существенно меняться в зависимости от внешних условна работы объекта, как показано на рис. 2.5. Устройство автоматического поиска должно всегда находить этот экстремум независимо от причин, вызывающих, его смещение в процессе работы объекта.

В схеме на рис. |
2.11 в целях наглядности функции автоматического поиска |
|
величины x0 и измерения фактического значения х1 регулируемой величины |
разделены. |
|
Чаще же система |
экстремального регулирования устраивается так, |
что обе эти |
функции объединены в одном приборе, в результате чего устройство автоматического
поиска выдает не x0, а непосредственно разностный |
|
сигнал |
на |
усилитель х3, |
|
пропорциональный отклонению фактического значения регулируемой |
величины |
от |
|||
требуемого для обеспечения экстремума той |
или |
иной |
характеристики |
||
регулируемого объекта (рис. 2.12). Это не меняет общей сути дела. |
|
|
|
||
|
|
|
. |
|
|
Экстремальное регулирование может применяться, например, для поддержания |
|||||
наивыгоднейшей скорости полета, соответствующей минимуму расхода горючего на |
|
||||
единицу длины пути. При этом будет достигнута и максимальная |
дальность полета |
||||
при заданном запасе горючего. |
|
|
|
|
|
Примерами экстремальных систем регулирования могут служить также: |
|||||
автоматическое поддержание максимальной скорости проходки |
скважины турбобуром |
||||
при меняющихся свойствах грунта; автоматические системы управления различными производственными процессами, поддерживающие наивыгоднейший режим работы станков; управление энергетическими установками и системами, обеспечивающее автоматический поиск и поддержание экстремума эксплуатационных характеристик, и т. д.
§ 2.5. Системы с самонастройкой параметров (собственно самонастраивающиеся системы)
Основным, в настоящее время, видом самонастраивающихся систем регулирования и управления являются такие системы, в которых автоматически, не заданным заранее образом, изменяются какие-нибудь параметры регулятора (или системы управления), т. е. коэффициенты усиления, коэффициенты интенсивности введения производной и интеграла в закон регулирования, коэффициенты обратных связей и постоянные времени фильтров. Когда говорят о самонастраивающихся системах управления, то имеют в виду чаще всего именно этот тип самонастраивающихся систем. Но поскольку системы экстремального регулирования, рассмотренные выше, тоже, по существу, являются самонастраивающимися, то данный новый вид самонастраивающихся систем более полно называют системами с самонастройкой параметров регулятора или системами с самонастраивающимися корректирующими устройствами (имеется в виду тоже самонастройка их параметров). Рассмотрим основную идею работы этого вида самонастраивающихся систем.
Когда хорошо известны свойства объекта и внешние возмущающие воздействия, а система достаточно проста, можно заранее уверенно выбрать наилучшие значения параметров регулятора, чтобы добиться надлежащего качества работы проектируемой автоматической системы. Если же параметры самого объекта известны недостаточно достоверно и если к, тому же они могут в процессе работы в некоторых пределах случайным образом меняться, то и: параметры регулятора (системы управления) и корректирующих устройств можно подобрать лишь ориентировочно. Поскольку все
качества работы автоматической системы (точность или ошибки при разных воздействиях, запас устойчивости, форма переходного процесса и т. п.) зависят от общей совокупности всех параметров объекта и регулятора, то очевидно, что в данной ситуации будет обеспечено надлежащее качество системы лишь в среднем. При этом будут происходить более или менее существенные ухудшения качества работы системы при случайных отклонениях параметров объекта в ту или другую сторону (или просто за счет недостоверности знания этих параметров при проектировании системы).
Есть несколько путей решения задачи.
Втом случае, когда имеет место простая недостоверность знания параметров объекта, но точно известно, что в процессе работы эти параметры остаются постоянными, можно просто произвести ручную подстройку некоторых параметров регулятора в начале эксплуатации данного объекта, добившись тем самым желаемого качества работы системы. Для этого нужно предусмотреть в конструкции регулятора соответствующие регулировочные потенциометры, емкости, винты и т. п. для настройки величин коэффициентов усиления, коэффициентов обратных связей и т. п.
Втех случаях, когда параметры объекта изменяются во времени при его работе (т. е. динамика объекта описывается уравнением с переменными коэффициентами), причем хорошо известен закон их изменения во времени, можно заранее рассчитать, по какому закону во времени нужно менять параметры регулятора, чтобы при данном изменении параметров объекта качество работы системы в целом оставалось неизменно хорошим.
Вданном случае нужно будет включить в систему уже не ручную, а программную настройку параметров регулятора по заданному закону во времени. В общем случае необходимо менять несколько параметров регулятора, корректирующего устройства или фильтра.
Поскольку непрерывное изменение параметров не всегда удобно для конструкции, прибегают к ступенчатому изменению параметров регулятора через определенные промежутки времени, рассчитанные так, чтобы за это время качество системы не сильно ухудшалось. При этом программным устройством в определенные моменты времени будут скачком подключаться или отключаться определенные участки сопротивлений, емкостей и т. п. для соответствующего изменения параметров регулятора.
Указанные пути ручной или программной настройки параметров, конечно, не приводят к самонастраивающимся системам. Они были описаны только для того, чтобы сделать более наглядным последующее изложение основ самонастройки. Вместе с тем изложенные методы программной настройки имеют и самостоятельное практическое значение и часто применяется. Во многих случаях такого рода ручной или программной настройки параметров регулятора или системы управления бывает достаточно, чтобы в среднем <(с допустимыми отклонениями) получать желаемые качества работы системы в течение всего времени. Однако на практике существует много случаев, когда указанные пути неприемлемы.
Во-первых, часто характер работы объекта вообще не допускает ручной настройки параметров системы управления во время эксплуатации. Во-вторых, составление программы изменения параметров регулятора часто невозможно либо вследствие незнания истинного закона изменения хотя бы некоторых параметров объекта, либо вследствие случайного характера их изменения.
Это имеет место, например, в различных неустановившихся режимах полета скоростных самолетов, когда встает задача о полной автоматизации управления. Такие же ситуации часто могут иметь место в системах управления многими производственными процессами в металлургии, в машиностроении, в химической промышленности и т. п.
Во всех этих случаях приходится прибегать к самонастройке параметров регулятора (системы управления) по заданному показателю желаемого качества работы системы. При этом в системе должно иметься специальное автоматическое устройство для анализа качества работы объекта в данной системе по какому-нибудь заданному критерию (рис.

2.13, а) или для анализа величины ошибок регулирования (рис. 2.13, б). В обоих случаях это устройство (анализатор) определяет отклонение качества системы от требуемого качества и передает соответствующий сигнал на настраивающее устройство, которое автоматически изменяет параметры регулятора в нужную сторону, чтобы ликвидировать нежелательное ухудшение качества работы системы.
Критерий качества может быть выбран любым из применяемых в теории регулирования или даже вновь выработан в интересах практики. Выбор его зависит от назначения и конструкции системы.
Таким образом, в самонастраивающихся системах данного типа сверх обычного замкнутого контура регулирования (управления) имеется замкнутый контур самонастройки (рис. 2.13).
Дальнейшим развитием устройств самонастройки в системах данного типа является самооптимизация системы, когда анализатор качества на схемах рис. 2.13 заменяется оптимизатором, т. е. устройством, которое производит настройку параметров регулятора оптимальным образом, отыскивая экстремум качества по заданному критерию, в частности, например, минимум ошибки регулирования.