

Теория систем автоматического управления. В.А. Бесекерский, Е.П. Попов, 1975
.pdfЕсли теперь на вход подать единичную импульсную функцию, которую можно представить как предел отношения
то процесс на выходе, т. е. функцию веса, в силу принципа суперпозиции можно представить в виде разности двух смещенных на ∆ϑ переходных функций с измененным в 1/ ∆ϑ раз масштабом:
Правая часть этого выражения представляет собой производную от переходной функции по аргументуϑ , взятую с обратным знаком. Таким образом, для функции веса получаем
(рис. 13.1, б)
 (13.3)
(13.3)
Как следует из (13.3), функция веса является функцией двух переменных: времени ϑ , соответствующего моменту поступления на вход системы единичного импульса, и текущего времени t (или τ = t −ϑ ). В связи с этим функцию веса можно изобразить в виде некоторой поверхности (рис. 13.2).
Эта поверхность переходит в плоскость t0ϑ при t< ϑ . Границе перехода поверхности в плоскость соответствует биссектриса t = ϑ . Это обстоятельство объясняется тем, что в реальных системах реакция не может появиться ранее приложения на входе системы импульса. Поэтому при t=ϑ функция веса должна быть тождественно равна нулю. Сечение поверхности весовой функции вертикальной плоскостью, параллельной оси t (рис. 13.2, а), дает весовую функцию для фиксированного момента приложения единичного импульса на входе системы (ϑ = const). Эта функция называется нормальной весовой функцией системы с переменными параметрами:
 (13.4)
(13.4)
Она является параметрической функцией, так как в нее входит фиксированный параметр
ϑ = const;.
Нормальная весовая функция может быть сделана зависящей от аргумента τ = t −ϑ подстановкойt =ϑ +τ . В результате получаем функцию
 (13.5)
(13.5)
Сечение поверхности весовой функции вертикальной плоскостью, параллельной оси и, дает кривую, образованную ординатами семейства нормальных весовых функций для фиксированного значения времени t=const (рис. 13.2, б). Эта кривая может быть получена путем обработки семейства нормальных весовых функций, построенных для различных моментов приложения единичного входного импульсаϑ (рис. 13.3). Получающуюся зависимость будем называть сопряженной функцией веса:
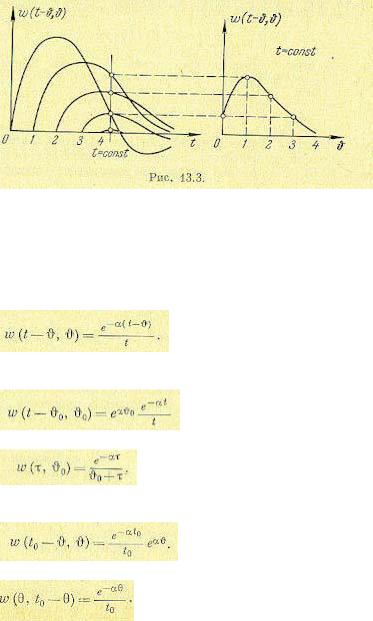
ω(t −ϑ,ϑ) , t=const. (13.6)
Она также является параметрической функцией, так как содержит параметр t=const. Сопряженная функция веса является функцией смещенияϑ , но может быть представлена также как функция аргумента θ = t −ϑ (рис. 13.2, б),
называемого реверс-смещением, поскольку θ отсчитывается от точки ϑ =t в сторону, противоположную смещению ϑ . Это осуществляется подстановкой в сопряженную весовую функцию значения ϑ = t −θ при t=const. В результате получаем
 (13.7)
(13.7)
Проиллюстрируем все сказанное примером. Пусть функция веса системы с переменными параметрами имеет вид
Зафиксировав смещение и положив, например, ϑ =ϑ 0 = const, получаем нормальную функцию веса:
или в другом виде, при переходе к аргументу τ = t −ϑ :
Зафиксировав текущее время и положив, например, t=t0=const, получаем сопряженную функцию веса
Перейдя к реверс-смещению θ = t −ϑ , имеем
Заметим, что в системах с постоянными параметрами весовая функция является функцией только времени θ = t −ϑ и не зависит от момента приложения ϑ входного импульса. Рельеф функции веса (рис. 13.2) в этом случае получается цилиндрическим, а оба рассмотренных выше сечения (рис. 13.2, а и б) совпадают по форме и отличаются только знаками аргументов. При переходе к реверс-смещению получаем полное совпадение двух функций веса — нормальной и сопряженной: ω(τ) =ω(θ) .
Пусть на систему (13.1) с функцией веса ω(t −ϑ,ϑ) действует входной сигнал f(t). Элементарная реакция на выходе системы в произвольный момент времени t ≥ϑ будет
 (13.8)
(13.8)
Полный сигнал на выходе линейной, системы определяется как суперпозиция элементарных реакций интегрированием (13.8) в пределах от 0 до t:
 (13.9)
(13.9)

Так как приϑ >t функция веса равна нулю, то выражение (13.9) можно также записать в виде
 (13.10)
(13.10)
Из двух последних выражений видно, что в интегральном уравнении связи между входной и выходной величинами используется сопряженная функция веса (13.6), т. е. разрез рельефа функции веса (рис. 13.2, б) вдоль аргумента ϑ .
Если использовать реверс-смещение θ = t −ϑ , то интегральная связь (13.9) может быть представлена в виде интеграла свертки
 (13.11)
(13.11)
Как уже отмечалось, в случае постоянства параметров системы функция веса зависит только от времени (t-ϑ )В этом случае формула (13.11) переходит в интеграл свертки
(7.44)
§ 13.2. Нахождение функции веса и построение переходных процессов
Функция веса системы с переменными параметрами является исчерпывающей характеристикой этой системы, и нахождение ее важно по следующим соображениям. Функция веса характеризует протекание временных процессов в системе регулирования, и по ее виду можно судить о качестве регулирования, аналогично тому, как это делалось для систем с постоянными параметрами (§ 8.4). По имеющейся функции веса можно определить время протекания переходного процесса, как характеристику быстродействия, и склонность системы к колебаниям.
Кроме того, по имеющейся функции веса можно строить процесс на выходе системы регулирования при заданных входных воздействиях, не производя при этом каждый раз полного решения исходного уравнения (13.1). В соответствии с формулами (13.9) и (13.11) для этой цели необходимо иметь сопряженные функции веса.
Ввиду сложности проблемы существующие методы позволяют пока решать задачу нахождения функции веса в численном виде. Только для систем регулирования, описываемых дифференциальными уравнениями первого и иногда второго порядков, удается решать задачу в общем виде. Поэтому в некоторых случаях приходится сложную систему с переменными параметрами приближенно сводить к более простой системе, движение которой описывается уравнением не выше второго порядка.
Следует заметить, что большинство систем регулирования с переменными параметрами относится к так называемым квазистационарным системам, или системам, параметры которых меняются сравнительно медленно. В подобных системах коэффициенты дифференциального уравнения (13.1) мало меняются в течение времени переходного процесса, определяемого временем затухания нормальной функции веса. Дифференциальное уравнение первого порядка. В некоторых случаях для оценки вида переходных процессов системы с переменными параметрами ее уравнение приближенно можно свести к дифференциальному уравнению первого порядка
 (13.12)
(13.12)
Это уравнение имеет аналитическое решение
 (13.13)
(13.13)
где
а С — постоянная интегрирования.
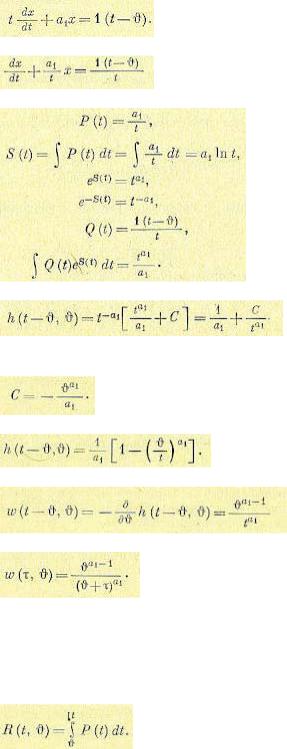
Пусть, например, имеется уравнение
 (13.14)
(13.14)
Определим для него семейство переходных характеристик h(t −υ,υ) = h(t,υ) . Для единичной ступенчатой функции при υ ≠ 0 уравнение можно записать в следующем виде:
Приведем его к виду (13.12):
Далее получаем:
На основании формулы (13.13) получаем
При нулевых начальных условиях (для t =υ ) должно быть h(0,υ) = 0 . Отсюда определяется постоянная интегрирования
Окончательно получаем
Дифференцируя последнее выражение по υ , можно получить функцию веса:
или в ином виде:
Для дифференциального уравнения (13.12) можно сразу найти функцию веса из общего решения (13.13), если положить в (13.12) входной сигнал равным единичному смещенному импульсу Q(t) =δ(t −υ) . Проделав необходимые выкладки, получаем
 (13.15)
(13.15)
где
Распространим этот результат на более общий случай записи дифференциального уравнения в виде
 (13.16)
(13.16)
Приведем его к виду (13.12):
Положив f (t) =δ(t −υ) , получаем для функции веса решение в виде
 (13.18)
(13.18)
где
Рассмотрим снова в качестве примера уравнение (13.14). Приведем его к виду
(13.17):
Обратившись к формуле (13.18), находим
и функцию веса
что совпадает с полученным ранее выражением.
Дифференциальное уравнение второго порядка. Рассмотрим случай, когда дифференциальное уравнение (13.1) сводится к уравнению второго порядка
 (13.19)
(13.19)
При помощи подстановки
 (13.20)
(13.20)
это уравнение приводится к виду
 (13.21)
(13.21)
Здесь введено обозначение
 (13.22)
(13.22)
При действии единичного импульса f (t) =δ(t −υ) для уравнения (13.21) получится
решение u = z(t −υ,υ) , которое связано с весовой функцией ω = z(t −υ,υ) исходного уравнения (13.19) на основании формулы (13.20) соотношением
Если же положить f (t) =δ(t −υ), то для уравнения (13.21) будет получена весовая функция r(t) =δ(t −υ), которая на основании (13.9) связана с решением z(t) =δ(t −υ) зависимостью
 (13.24)
(13.24) (13.25)
(13.25) (13.26)
(13.26) (13.27)
(13.27) (13.28)
(13.28) (13.29)
(13.29) (13.30)
(13.30)
Сравнивая (13.30) и (13.27), видим, что выражение (13.28) будет частным решением уравнения (13.27), если выполняется тождество
 (13.31)
(13.31)
Решение уравнения (13.31) и отыскание функции N(t) является сложной задачей вследствие наличия нелинейностей в (13.31). Однако может быть найдено приближенное решение (13.31) в виде ряда, если удовлетворяются неравенства
Тогда решение (13.21) можно представить в виде
 (13.32)
(13.32)
Подставляя этот ряд в (13.31), получаем формулы для определения членов ряда;
 (13.33)
(13.33)
Часто можно ограничиться только первым членом ряда (13.22), что будет справедливым, если функция F(t) изменяется медленно, оставаясь в среднем большой (риc. 13.4). Тогда
 (13.34)
(13.34)
При выполнении условия F(t)> 0 в качестве второго частного решения можно взять комплексно-сопряженную величину (13.29)
 (13.35)
(13.35)
Тогда можно показать, что решение уравнения (13.26) будет
 (13.36)
(13.36)
или, после подстановки (13.28) и (13.35),
 (13.37)
(13.37)
В предельном случае постоянства параметров F(t) = Ω2 = const . Тогда S(t) = Ωt и S(υ) = Ωυ . В результате из формулы (13.37) можно получить функцию веса консервативного звена
Для исходного дифференциального уравнения (13.19) на основании (13.25) и (13.37) получаем искомую функцию веса
 (13.38)
(13.38)
Критерием медленности изменения функции F(t) и, следовательно, применимости полученного выражения может служить неравенство
 (13.39)
(13.39)
которое получается из (13.31) и (13.34).
Метод последовательных приближений. Рассмотрим уравнение (13.1):

Ограничиваясь случаем квазистационарных систем и полагая, что коэффициенты ai (t)
меняются медленно, найдем функцию веса для этого уравнения.
Переменные коэффициенты в левой части исходного уравнения представим в виде суммы постоянной и изменяющейся частей:
 (13.40)
(13.40)
где ai0 = ai (υ) — переменный коэффициент, зафиксированный для момента-
приложения входной величины t =υ .
Тогда исходное дифференциальное уравнение (13.1) можно представить в виде
 (13.41)
(13.41)
где
 (13.42).
(13.42).
 (13.43),
(13.43),
Поскольку мы предположили, что коэффициенты ai (t) меняются медленно, то функция
у(t) мала по сравнению с левой частью (13.41). Эту функцию можно рассматривать как возмущение, и тогда к уравнению (13.41) можно применить метод последовательных приближений.
В уравнении (13.41) можно перейти к изображениям по Лапласу. Тогда получим
 (13.44)
(13.44)
Здесь введено обозначение
 (13-45)
(13-45)
Решение уравнения (13.41) или (13.44) можно записать в виде ряда
 (13.46)
(13.46)
Для получения первого приближения х1 зафиксируем переменные коэффициенты ai (t) = ai (υ) . Тогда первое приближение может быть найдено как решение дифференциального уравнения
 (13.47)
(13.47)
Решение этого уравнения можно получить, используя обычные методы ,(см. главу 7), в том числе путем нахождения оригинала, соответствующего изображению (13.44) при
У(р)= 0:
 (13.48)
(13.48)
Для получения второго приближения в правую часть (13.41) или (13.44) подставляется первое приближение х = х1, а в левую часть -х = х1 + х2. Тогда получается уравнение с фиксированными коэффициентами для определения поправки:
 (13.49)
(13.49)
Это уравнение также может быть решено с использованием преобразования Лапласа посредством нахождения оригинала изображения
где У1(р) — изображение у(t) при подстановке в формулу (13.43) х = х1. Повторяя этот процесс многократно, можно найти рекуррентное соотношение для определения k-го члена ряда (13.46):
 (13.50)
(13.50)
Ряд (13.46) сходится тем быстрее, чем медленнее изменяются коэффициенты ai (t) .
Рассмотренный метод может использоваться как для нахождения функции веса и переходной функции, так и для построения переходного процесса при любом известном воздействии f(t).
Численно-графический метод. Численно-графический метод Д. А. Башкирова [98] разработан также применительно к системам с переменными во времени параметрами, причем можно вводить любое переменное возмущающее или задающее воздействие и произвольные начальные условия.
Неоднородные уравнения первого порядка с переменными коэффициентами. Пусть требуется построить решение уравнения
с начальным условием х = х0 при t = 0. Разделив его на уравнение к виду
 (13.51)
(13.51)
где
Уравнение (13.51) можно решать графически, если считать Т постоянным и равным
T (t + ∆2t ) внутри каждого интервала времени (t, t + ∆t) ,
но различным для разных интервалов. Формула для решения в этом случае будет
а процесс построения сводится к следующему. Наносим заданные кривые f(t) и Т(t) (рис. 13.5). Из точки Е кривой f(t), взятой в середине первого интервала ∆t , откладываем по
горизонтали отрезок EM =T ( ∆2t ) , величина которого берется равной ординате точки Н
заданной кривой Т(t), т. е. тоже в середине первого интервала ∆t . Полученная точка М соединяется прямой линией с заданной начальной точкой процесса А.
В результате получается новая точка В искомой кривой х (t). Затем аналогично берется ордината точки I, откладывается в виде отрезка FН и проводится прямая NВ, дающая новую точку С решения х(t), и т. д.
Неоднородные уравнения второго порядка с переменными коэффициентами. Требуется построить решение уравнения
которое можно записать также в виде
 (13.52)
(13.52)
где

 (13.53)
(13.53) (13.54)
(13.54) (13.55)
(13.55)