

getmanov_v_g_cifrovaya_obrabotka_signalov_uchebnoe_posobie / getmanov_v_g_cifrovaya_obrabotka_signalov_uchebnoe_posobie
.pdfразрядов цифрового кода с выхода АЦП (не считая знака);
– рабочий диапазон АЦП по входному напряжению; этот
параметр устанавливается стандартным рядом значений – чаще всего VАЦП 1 и 5 В.
Последовательность y0 (Ti) с выхода АЦП является дискретизованной по времени и по уровню. Благодаря дискретизации по времени из непрерывного информационного сигнала V2 (t) с шагом T формируется последовательность значений V2 (Ti). Вследствие дискретности по уровню последовательность V2 (Ti) преобразуется с помощью функции преобразования АЦП FАЦП в последовательность целых чисел y0 (Ti) :
y0 (Ti) FАЦП (V2 (Ti), VАЦП , LA) .
На рис. 1.3.8 показан график рассматриваемой нелинейной функции преобразования FАЦП для VАЦП 5 В, LA 4 . В соответ-
ствии с принятыми значениями параметров АЦП преобразуемые сигналы y0 (Ti) представляются целыми числами в диапазоне от 0 до 15 (без учѐта знака).
FАЦП
Рис. 1.3.8. Функция преобразования АЦП
31
Дискретность по уровню вносит погрешности в информационный сигнал. Нетрудно подсчитать величину VАЦП
1) , соответствующую цене одного разряда АЦП, ко-
торая позволяет ориентировочно оценить величину погрешности от дискретизации по уровню.
При работе АЦП следует обеспечивать согласование (примерное равенство) максимального значения напряжения сигнала V2 и диапазона VАЦП . Рассмотрим необходимость такого согласования. С этой целью смоделируем синусоидальный сигнал вида
V2 (Ti) |
Asin(2 |
f Ti), i 0, 1,..., N |
1; |
T |
0,01 c; |
N 1000; |
|
f 0,1 Гц и двумя амплитудами А |
4,32 , |
А |
0,65 Для АЦП |
||||
|
|
1 |
|
|
2 |
|
|
были |
выбраны |
параметры VАЦП |
5 В, |
LA |
4, для |
которых |
|
VАЦП |
0,33 В. |
|
|
|
|
|
|
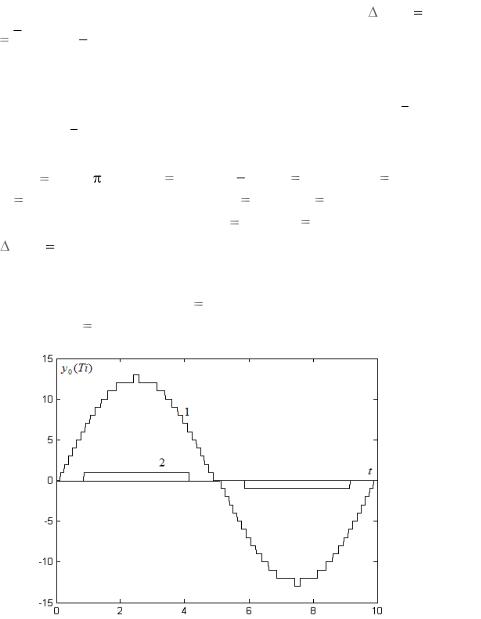
На рис. 1.3.9 помещены графики дискретизованных по уровню модельных синусоидальных сигналов, кусочно-постоянная линия с
индексом |
1 |
соответствует А |
4,32 , линия с индексом 2 соот- |
|
|
1 |
|
ветствует |
А2 |
0,65. Из-за того, |
что во втором случае амплитуда |
Рис. 1.3.9. Результаты дискретизации синусоидальных сигналов
32

синусоиды существенно меньше величины VАЦП, преобразован-
ный синусоидальный сигнал на выходе представляет собой двухуровневую последовательность.
1.3.4. Устройства буферной памяти
На вход буферного запоминающего устройства (БЗУ) поступают данные от АЦП. БЗУ обеспечивает промежуточное хранение массивов дискретизованных данных. Для БЗУ следует отметить параметры, существенные при реализации сбора данных: 1) tБЗУ – вре-
мя ввода одного кода от АЦП в БЗУ; tБЗУ T n; 2) объем памяти БЗУ – VБЗУ в Кб (Мб), где б – байт. При формировании конкретной системы сбора данных необходим учѐт типа памяти БЗУ. При использовании микросхем с электродинамической памятью реализуется принудительный режим регенерации; при отключении питания в подобных БЗУ информация не сохраняется. При использовании в БЗУ элементов памяти электромагнитного типа при отключении питания информация сохраняется.
n; 2) объем памяти БЗУ – VБЗУ в Кб (Мб), где б – байт. При формировании конкретной системы сбора данных необходим учѐт типа памяти БЗУ. При использовании микросхем с электродинамической памятью реализуется принудительный режим регенерации; при отключении питания в подобных БЗУ информация не сохраняется. При использовании в БЗУ элементов памяти электромагнитного типа при отключении питания информация сохраняется.
При реализации сбора дискретных данных целесообразно рассмотреть особенности организации непрерывного сбора (режим "пинг-понг") для обеспечения сбора без пропусков наблюдений. Основной фактор, который необходимо учитывать при организации непрерывного сбора, состоит в необходимости согласования частоты дискретизации с максимально возможной частотой ввода оцифрованных данных в ОЗУ или ДЗУ. Обозначим tо , tз – время,
затрачиваемое на открытие и закрытие файла; tN – время передачи файла из N чисел из ОЗУ в ДЗУ; tВ – время ввода одного числа в ОЗУ, tКПД – время ввода одного кода в ОЗУ по каналу прямого
доступа (с автоматической адресацией).
Первый вариант сбора в режиме "пинг-понг" реализуется на основе разбиения БЗУ на две переключающиеся зоны, в каждой из которых записывается по N чисел (рис. 1.3.10а); условие непрерывности ввода представляется неравенством NtБЗУ NtB to
tз tN . Второй вариант организации непрерывного сбора осуще-
ствляется на основе канала прямого доступа (КПД) в ОЗУ и выделении программным способом в ОЗУ двух переключающихся зон
33
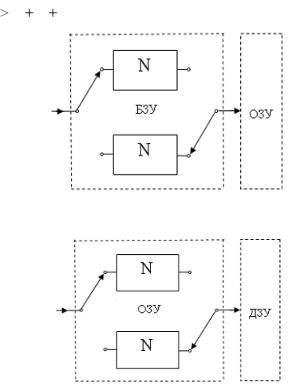
(массивов) по N чисел (рис. 1.3.10б); в этом случае непрерывность сбора данных обеспечивается при выполнении неравенства
NtКПД to tз tN .
Рис. 1.3.10а. Схема режима «пинг-понг» для БЗУ
Рис. 1.3.10б. Схема режима «пинг-понг» для ОЗУ
Список вопросов для самопроверки к гл. 1
1.Каково назначение основных элементов для структуры системы ЦОС?
2.Из каких элементов состоит ССД?
3.Какие основные элементы входят в состав конструкций пьезоэлектрических датчиков ускорений?
4.В чѐм состоит назначение усилителей выходных сигналов датчиков ССД?
5.В чѐм состоит назначение противомаскировочных фильтров?
34
6. Какие основные характеристики противомаскировочных фильтров существенны при построении систем ЦОС?
7.В чѐм состоит назначение электронных коммутаторов каналов (мультиплексоров) для ССД?
8.Какие основные характеристики мультиплексоров существенны при построении систем ЦОС?
9.В чѐм состоит назначение АЦП?
10.Какие основные характеристики АЦП существенны при построении систем ЦОС?
11.Каким образом разрядность и диапазон по входному напряжению АЦП влияют на точность ЦОС?
12.В чѐм состоит назначение БЗУ?
13.Какие основные структуры БЗУ используются в системах
ЦОС?
14.Какие основные типовые алгоритмы реализуются в СОИ?
35
Глава 2. МОДЕЛИ СИГНАЛОВ, ОЦЕНИВАНИЕ ПАРАМЕТРОВ СИГНАЛОВ
2.1. Синусоидальные сигналы
2.1.1. Гармонические и полигармонические сигналы
Сигналы, которые рассматриваются в технической дисциплине ЦОС, определяются устройством и особенностями конструкции объектов управления, видом управляющих воздействий и описываются различными функциями времени. Как правило, сигналы – это действительные функции времени, обозначаемые как x(t) , оп-
ределѐнные на бесконечном t или на конечном t0 t t f
временном интервале. Для наиболее типичных случаев ЦОС, имеющих многочисленные приложения, используются варианты синусоидальных сигналов.
Гармонический (синусоидальный или монохроматический) сигнал являет собой простейший пример сигнала, который рассматривается в ЦОС. Общий его вид представляется выражением
|
x(t) |
Acos( |
t |
) acos t |
bsin t , |
(2.1.1) |
где a |
Acos , b |
Asin |
, A |
(a2 b2)1/2 |
– амплитуда гармони- |
|
ческого сигнала; |
(t) |
t |
– фазовая функция; |
– начальная |
||
фаза и |
arctg( |
b / a) . Частота сигнала связана с фазовой функци- |
||||
ей через производную – |
(t) |
. Поскольку в данном случае фазо- |
||||
вая функция изменяется по линейному закону, то частота гармонического сигнала постоянна во времени. Частота, обозначаемая в виде , измеряется в рад/с ; частота сигнала, обозначаемая в виде f
и удовлетворяющая соотношению 2 f |
, измеряется в Гц. |
||||
Полигармонический сигнал описывается в виде суммы не- |
|||||
скольких гармонических составляющих |
|
||||
|
|
|
L |
L |
|
|
x(t) |
Al cos( lt l ) |
(al cos lt bl sin lt). (2.1.2) |
||
|
|
l |
1 |
l 1 |
|
Частоты |
l |
для (2.1.2) в общем случае являются произвольными и |
|||
|
|
|
|
|
|
для определѐнности будем считать их упорядоченными – удовле-
36
творяющими системе неравенств |
1 2 |
... |
L |
, (a2 |
b2 )1/2 |
A |
||
|
|
|
|
l |
l |
l |
||
амплитуды, arctg( |
bl / al ) l – |
начальные |
фазы |
гармонических |
||||
составляющих, l |
1,..., L . |
|
|
|
|
|
|
|
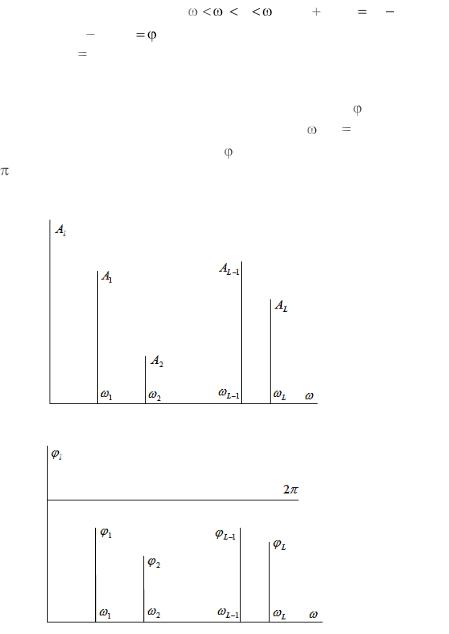
Составить наглядное представление о полигармонических сигналах позволяет их амплитудный и фазовый спектр – графическое изображение распределения амплитуд Al и начальных фаз
монических составляющих по дискретным частотам l , l 1,..., L. Отметим, что значения начальных фаз l приводятся к диапазону [0, 2 ] . Пример амплитудного и фазового спектра для некоторого полигармонического сигнала изображѐн на рис. 2.1.1а, 2.1.1б.
Рис. 2.1.1а. Амплитудный спектр полигармонического сигнала
Рис. 2.1.1б. Фазовый спектр полигармонического сигнала
37
Модулированный по амплитуде и фазе (модулированнный по частоте) синусоидальный сигнал является обобщением монохро-
матического сигнала и представляется следующим выражением: x(t) E(t)cos (t),
где E(t) – амплитудная функция (огибающая); (t) – нелинейная фазовая функция. При фиксированном значении x(t) амплитуда и
фаза модулированного сигнала не определены однозначно, поскольку для любого момента времени t справедливо соотношение
x(t) E1(t)cos 1(t) E2 (t)cos 2 (t) .
Для обеспечения однозначности представления необходимо введение дополнительных условий, накладываемых на сигнал. Производная по времени фазовой функции есть мгновенная частота сигнала по определению, т.е. (t) (t). Вследствие этого модулиро-
ванной фазовой функции соответствует модулированная частотная функция и наоборот.
Если |
выполняется неравенство для частоты |
0 |
(t) |
|
|
|
|
0 |
, то x(t) является полосовым сигналом, |
0 – его средняя |
|
частота, 2 – ширина частотной полосы сигнала. Узкополосный
сигнал с условием 2 |
0 |
может быть записан в виде |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
x(t) a(t)cos |
0t b(t)sin |
0t |
E(t)cos( 0t |
|
(t)) , |
||||||||||
где функции a(t) |
E(t)cos |
(t) , |
b(t) |
E(t)sin (t) имеют огра- |
|||||||||||
ниченные нулевые и первые производные |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
a12 , b11 |
|
b(t) |
|
b12 . |
||||
a01 |
a(t) |
a02 , b01 |
|
b(t) |
b02 , a11 |
a(t) |
|
|
|
||||||
Очевидно, амплитудная функция E2(t) |
a2(t) |
b2(t) в этом случае |
|||||||||||||
ограничена сверху и снизу: |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
a2 |
|
b2 |
E2 |
(t) a2 |
b2 . |
|
|
|
|
|||
|
|
|
01 |
01 |
|
|
02 |
02 |
|
|
|
|
|
||
Для фазовой функции справедливы соотношения |
|
|
|
|
|||||||||||
|
|
(t) |
0t |
|
(t) , |
(t) |
arctg( |
b(t) / a(t)) . |
|
|
|
|
|||
После дифференцирования (t) получим выражение для переменной во времени частоты
38
(t) |
|
b(t)a(t) b(t)a(t) |
. |
0 |
|
||
|
a2 (t) b2 (t) |
||
|
|
||
С учѐтом введѐнных ограничений на амплитуды и их производные из последней формулы вытекает неравенство для частоты (t):
|
|
(t) |
|
|
|
|
(b a |
b a ) / (a2 |
b2 ) , |
|||
0 |
|
0 |
, |
|
||||||||
|
|
|
|
12 |
02 |
02 |
12 |
01 |
01 |
|||
где 2 – верхнее значение полосы сигнала. Ограничения на производные для амплитуд a(t), b(t) влияют на ширину полосы узко-
полосного сигнала и обусловливают медленные изменения амплитудой E(t) и частотой (t) функций.
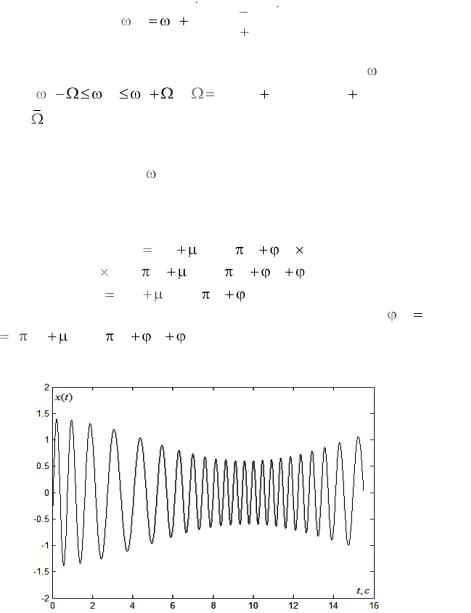
На рис. 2.1.2а представлен пример реализации сигнала x(t) с модулированными по синусоидальному закону амплитудными и
фазовыми функциями |
|
|
|
|
|
|
|
||
|
|
х(t) |
E(1 |
1 cos(2 f1t |
1)) |
|
(2.1.3) |
||
|
|
cos(2 |
f0t |
2 sin(2 f2t |
2 ) |
0 ). |
|||
|
|
|
|||||||
Для (2.1.3) E(t) |
E(1 |
1 cos(2 |
f1t |
1)) представляет собой вы- |
|||||
ражение |
для модулированной амплитудной |
функции, |
(t) |
||||||
2 f0t |
2 sin(2 |
f2t |
2 ) |
0 |
– |
для |
модулированной |
фазовой |
|
функции. |
|
|
|
|
|
|
|
|
|
Рис. 2.1.2а. Реализация узкополосного сигнала с синусоидальной амплитудной и частотной модуляцией
39
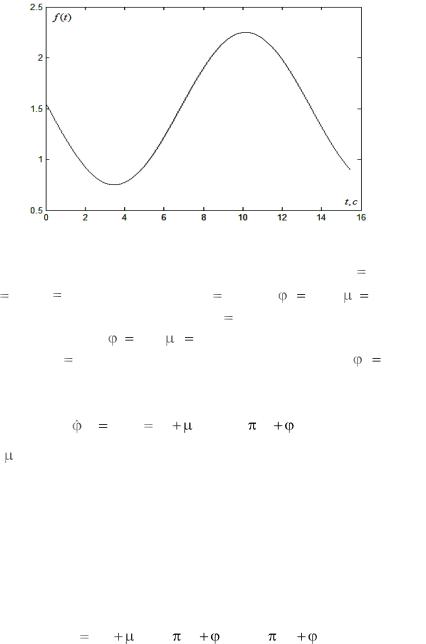
Рис. 2.1.2б. Функция синусоидальной частотной модуляции
Сигнал рис. 2.1.2а определѐн |
на интервале времени t f |
15,5 c |
(t0 0), E 1, несущая частота |
f0 1,5 Гц, 0 0,5, |
1 0,5 – |
глубина амплитудной модуляции, f1 0,05 Гц – частота ампли-
тудной модуляции, |
1 |
0,1, |
2 |
10 – индекс модуляции фазовой |
|||||
|
|
|
|
|
|
|
|
||
функции, |
f2 0,075 Гц – |
частота фазовой |
модуляции, |
2 |
1,5. |
||||
Для данного узкополосного сигнала частотная функция f (t) |
меня- |
||||||||
ется в соответствии с |
|
|
|
|
|
|
|
|
|
|
(t) |
f (t) |
f0 |
|
2 f2 cos(2 f2t |
2 ) , |
(2.1.4) |
||
где 2 f2 |
– индекс частотной модуляции. На рис.2.1.2б изображен |
||||||||
график частотной функции |
f (t) |
(2.1.4). |
|
|
|
||||
2.1.2. Синусоидальные сигналы с амплитудной и частотной модуляцией
Рассмотрим простейшие случаи синусоидальных амплитудных и фазовых модуляций гармонических сигналов, которые обусловли-
вают их полигармонический характер.
Гармонический сигнал с амплитудной синусоидальной модуляцией представляется выражением
x1(t) E(1 1 cos(2 f1t |
1))cos(2 f0t |
0 ). |
(2.1.5) |
40 |
|
|
|